
Fターム[2F062AA71]の内容
機械的手段の使用による測定装置 (14,257) | 測定内容 (2,477) | 角度 (231)
Fターム[2F062AA71]の下位に属するFターム
Fターム[2F062AA71]に分類される特許
1 - 20 / 148
トンネル切羽の整形システムおよび整形方法
表面性状測定機
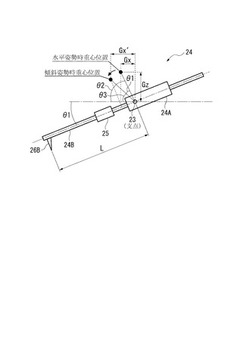
【課題】傾き角度を任意の角度に変更した場合でも正確な測定ができ、メモリ容量も少なく、新たなスタイラスの使用でもユーザに対する作業負担を軽減できる表面性状測定機。
【解決手段】質量の異なる第2測定アーム24Bが取り付けられた測定アーム24の種類毎に、測定アーム全体の質量M、支点(回転軸23)からスタイラス26Bまでのアーム長L、測定アームが水平姿勢時において測定アームの水平方向重心位置Gxおよび上下方向重心位置Gzを記憶した測定アームテーブルと、測定アーム指定手段と、検出手段の傾斜角度θ1を検出する傾斜角度検出器と、指定された測定アームのM、L、GxおよびGzを測定アームテーブルから読み出し、これらと傾斜角度検出器で検出された傾斜角度θ1とから、測定アームの水平姿勢時の測定力と測定アームの傾斜姿勢時の測定力との差を演算し、この差を補正値として測定力を調整する制御装置とを備える。
(もっと読む)
位置計測装置及び位置計測システム

【課題】本発明は、機動性に優れ、平坦でない計測基準面でも、高い精度で位置を素早く計測できる位置計測装置を提供する
【解決手段】カメラデータ計測装置1は、紐状体200の紐長変化量と紐状体の紐方向とを計測する位置センサ100と、両端が位置センサ100と撮影カメラ900とに接続された紐状体200と、紐長変化量及び紐方向に基づいて、撮影カメラ900のカメラデータを計測する演算装置300とを備え、演算装置300が、紐長初期値L0と位置センサ100で計測された紐長変化量ΔLとの和を紐方向での紐全長Lとして求め、求めた紐方向での紐全長Lを3次元方向成分に分解することで、撮影カメラ900の位置を示す3次元座標を算出する。
(もっと読む)
測定装置、測定方法、タッチプローブおよびキャリブレーションゲージ
【課題】被測定物の凹部を測定できない事態の発生を極力回避することができる測定装置を提供する。
【解決手段】被測定物設置体219と、筐体215に回転自在に設けられているスピンドル217とを具備したヘッド213と、スピンドル217に一体的に設置されるハウジングと測定子61を具備するスタイラス60とを備えハウジングがスピンドル217に設置されたときに測定子61がスピンドル217の回転中心軸Cから離れているタッチプローブ60と、を有し、スピンドル217に設置されている設置済みタッチプローブ60をインデックス位置決めした状態で、筐体215を被測定物設置体219に対して相対的に移動し、被測定物設置体219に設置された設置済み被測定物の形状を測定するように構成されている被測定物の測定装置201である。
(もっと読む)
眼鏡枠形状測定装置
【課題】高カーブフレームの精度の良い測定を可能にし、型板測定においても型板トレースの精度の向上を図ることが可能な眼鏡枠形状測定装置を提供する。
【解決手段】測定子281が取り付けられた測定子軸282を傾斜可能に保持する保持ユニット250と、測定子軸の傾斜角度を検知する手段と、XY移動手段と、Z方向の軸を中心に回転する回転手段265と、を有する測定ユニットを備え、型板測定モード時に、測定子軸の背面を型板のエッジに接触させるように回転手段及びXY移動手段を制御する制御手段と、保持ユニットのXY方向の位置情報、回転手段の回転情報及び傾斜角の検知情報とに基づいて型板の動径情報を求める演算手段と、を備え、制御手段は、型板の測定途中では、測定済み情報に基づき、測定子軸の背面が型板のエッジに接触したときに測定子軸の傾斜が垂直を維持するように、回転手段及びXY移動手段を制御する。
(もっと読む)
形状評価方法、形状評価装置、プログラム及び記録媒体
【課題】輪帯面と壁面とが交互に連続して形成された被測定面であっても、フィッティング精度を向上させることを目的とする。
【解決手段】複数の点データを列毎にグループ化して複数の点列データを生成する(S102)。点列データ毎に走査軌跡面関数をそれぞれ求める(S103)。複数の点データの中から各輪帯面のデータと見做せる点データを各輪帯面に対応して抽出し、得られた抽出データ毎に、その抽出データを関数近似して輪帯面を示す輪帯面関数をそれぞれ求める(S104)。設計データに基づいて壁面関数をそれぞれ求める(S105)。各面関数が交差する各々の交点データを求める(S106)。参照データと交点データとをフィッティングさせる座標変換パラメータを求める(S107)。座標変換パラメータで各点データを座標変換する(S108)。座標変換した点データと被測定面の設計データとの差分を求める(S110)。
(もっと読む)
形状測定用測定子の校正方法
【課題】被測定物を取り付けるための回転テーブルの中心位置に測定子の中心が届かなくても、その被測定物の形状を測定する測定子を、高精度に校正することができる形状測定用測定子の校正方法を提供する。
【解決手段】回転テーブル11上のワークの形状を測定する測定子22の校正方法において、校正用の基準円筒30を、軸間距離Lに位置するテーブル回転軸C周りに旋回可能に設け、測定子22の半径r、基準円筒30の半径R及び旋回角度αtに基づいて、測定子22の理論中心位置OL,ORを設定し、この理論中心位置OL,ORに位置決めした測定子22と、旋回角度αtに旋回させた基準円筒30とが接触する理論接触位置及び実接触位置を求め、これらの間の旋回角度誤差、軸間距離L、測定子22の半径r、基準円筒30の半径Rに基づいて求めた位置誤差に応じて、測定子22を校正する。
(もっと読む)
形状測定方法、これを用いた加工方法、および形状測定装置
【課題】表面形状の設計値が複数の関数によって定義される場合にも、測定データのアライメント補正を行った上で被測定体の表面形状の設計値からのずれ量として測定することができるようにする。
【解決手段】表面形状の設計値を複数の関数で定義する形状定義工程(S1)と、表面形状の測定データを取得するデータ取得工程(S2)と、測定データを関数の定義域ごとの部分群に区画するデータ区画工程(S3)と、部分群による表面形状の設計値からのずれ量を表す移動パラメータを推定する解析工程(S4、S7、S11)と、この移動パラメータを用いて測定データのアライメント補正を行って、補正済測定データを生成するアライメント補正工程(S5、S8、S12)と、補正済測定データと複数の関数との偏差を形状誤差として算出する形状誤差算出工程(S13)と、を備える形状測定方法を用いる。
(もっと読む)
反り検査装置および反り検査方法
【課題】平板状に形成される検査対象の反り方向を簡易な構成にて検査し得る反り検査装置および反り検査方法を提供を提供する。
【解決手段】アクチュエータ12により平面部11a上に載置された平板状のセラミック基板20の外縁部22が押圧されて、フォトセンサ13により上記押圧力の解除後におけるセラミック基板20の回転が検知される場合に、当該セラミック基板20の反り方向が、外縁部22に対して中央部21が平面部11a側に凸となる反り方向(下側に凸となる反り方向)であることが検知される。
(もっと読む)
ボールねじの測定装置および測定方法
【課題】ボールねじナットの内周面の溝形状の検査を容易且つ短時間で行う。
【解決手段】ボールねじナットを回転テーブル22により回転自在に支持するとともに、その回転角度をロータリエンコーダ23で測定し、測定子3をXYZテーブル12により、XYZ方向に移動自在に支持するとともに、測定子3がボールねじナットの方向に移動するX軸方向の変位をリニアゲージ13により測定し、測定子3が上下に移動するZ軸方向の変位をダイヤルゲージ14により測定する。これらセンサの検出信号をもとに、ボールねじナットにおける測定子3の位置座標を演算し、位置座標をもとにボールねじナットの各部の測定を行う。
(もっと読む)
形状測定装置及び方法
【課題】 プローブによって、垂直へ切り立った壁面や穴の内面であっても、安定して接触力を制御し、高速な形状計測を行うこと。
【解決手段】 接触式プローブを被測定物の表面に沿って移動させることで、被測定物の表面形状を測定する形状測定方法において、プローブに加わる接触力の分力の大きさにより、被測定面と移動手段の方向の関係を推定する。その結果、被測定面と垂直に近い状態であると判断された方向の移動手段のみによって、プローブの接触力制御を行うこと。
(もっと読む)
角度計
【課題】アーム部の長さが短くても高精度な角度測定を行える。
【解決手段】角度計1は、第一アーム部2と第二アーム部3が支軸を中心に相対回転可能に支持される。第一アーム部2の中心線は角度表示器5の0度に位置合わせする。支軸と同軸に角度表示器5を第一アーム部3の一端に固定する。第二アーム部3の自由端部に角度器10を設ける。角度器10は周方向に角度目盛りを付した角度表示部8を表示ケース7で囲い一体に回転可能とする。表示ケース7内に設けた球体9は重力方向に位置する。角度器10を関節等に位置決めし、第一アーム部2と第二アーム部3を体幹に沿って直線状に配列し、重力方向に位置する球体9に角度表示部8の0度を一致させる。そして、角度器10を中心に直線の第一アーム部2と第二アーム部3を腕部または大腿部に一致させることで、球体9が回転角度を表示する。
(もっと読む)
表面性状測定機の直角度誤差算出方法および校正用治具
【課題】簡易でかつ安価な校正用治具を用いて直角度誤差を簡易にかつ高精度に算出可能な表面性状測定機の直角度誤差算出方法および校正用治具を提供する。
【解決手段】3つの基準球62A〜62Cを校正プレート61に直角に配置した校正用治具60を、テーブル16上に配置し、接触式検出器20によって3つの基準球の中心座標を求め(第1測定工程)たのち、これら中心座標を結ぶ2つの直線の交差角度θ1を算出する(第1角度算出工程)。次に、校正用治具を、同一面内で90度回転させてテーブル上に配置し、接触式検出器によって3つの基準球の中心座標を求め(第2測定工程)たのち、これら中心座標を結ぶ2つの直線の交差角度θ2を算出する(第2角度算出工程)。最後に、交差角度θ1,θ2とからY軸駆動機構17の移動方向とX軸駆動機構48の移動方向との直角度誤差を算出する(直角度誤差算出工程)。
(もっと読む)
三次元形状測定装置
【課題】測定物の上面も側面も10〜100ナノメートルの超高精度で走査測定できる三次元形状測定装置を提供する。
【解決手段】上面スタイラス1aは、エアスライド1cによりXY方向には振れずに測定物の上面を走査測定でき、第1のミラー1bとレンズ2deによりZ座標も精度良く測定でき、側面スタイラス2iaは、XY方向にのみ変位可能でZ方向には振れないので測定物の側面を走査測定でき、側面スタイラス2iaのZ座標測定は前記第1のミラー1bのZ座標測定値を利用して、より高精度に側面スタイラスのXY変位を傾斜角度測定部2jで測定することができる。
(もっと読む)
着座者の骨盤の倒れ角測定装置
【課題】着座者の着座に伴う筋疲労を低減することができるシートであるか否かの評価分析を簡単かつ正確に行うことができる着座者の骨盤の倒れ角測定装置を提供する。
【解決手段】円形リング状の模擬臀部10と架け渡し部材20と模擬坐骨結節部30と上肢錘40と模擬腰椎プレート50を備え、模擬臀部10がシートクッション2に載置され、上肢錘40が錘取り付け部21に取り付けられると、上肢錘40の重量により模擬坐骨結節部30の下端部30Kを中心として後方に回転するとともに、模擬腰椎プレート50がシートバック3を押圧変形させて回転が停止し、模擬坐骨結節部30の下端部30Kを中心とする模擬坐骨結節部30の回転角から着座者の骨盤4の後方への倒れ角が求められるよう構成されている。
(もっと読む)
外骨格を有するCMMアーム
【課題】外骨格および伝達手段を有するCMMアームを提供する
【解決手段】 ベース端及びプローブ端を有する内部CMMアームと、複数の伝達手段を介して内部CMMアームを駆動する外骨格とを備える、外骨格を有するCMMアームの装置が提供される。1つ又は複数の接触プローブ、光学プローブ、及び工具が、プローブ端に取り付けられる。外骨格を有するCMMアームは、手動操作可能な実施形態及び自動実施形態で提供される。外骨格を有するCMMアームは、高精度測定のため、又は高精度動作を行うために動作可能である。外骨格を有するCMMアームの動作の方法が提供される。
(もっと読む)
寸法測定用機器
【課題】長さを測定するための複数のプローブを有する測定システムを提供する。
【解決手段】それぞれのプローブ40が、ケーシング51に対して着脱可能な方法で接続するプローブチップ60、ケーシング51に対する前記プローブチップ60の位置を表す電気信号を供給するトランスデューサ65、前記トランスデューサ65からの信号をサンプリングする、およびそれを前記位置のデジタル表現に変換するためのデジタル処理ユニット71、ならびに前記プローブ40を制御ユニットに接続するワイヤレス通信ネットワークのための双方向インタフェースを含む。方法は、前記プローブ40のデジタル処理ユニット71のクロックが前記双方向ワイヤレスインタフェースを通じて同期する間の工程と、制御ユニットが、前記電気信号がサンプリングされる瞬間を定めるコマンドを送信する間の工程と、によって特徴付けられる。
(もっと読む)
タイヤ偏摩耗量測定装置
【課題】偏摩耗量の測定作業の効率化を図りつつ偏摩耗量の測定精度を確保する上で有利なタイヤ偏摩耗量測定装置を提供する。
【解決手段】デプスゲージ20のスピンドル24の先端を弾性板18の下面の位置に合致させた状態でゼロセットスイッチを操作し、測定部の移動量を原点(ゼロ)に設定しておく。弾性板18の長手方向をタイヤ2の周方向と平行させ、当て付け面16を摩耗量の少ないトレッド面2Aの箇所に当接しつつその長さ方向に沿って延在させる。この状態で操作部26を下方に動かしスピンドル24の先端を測定すべきトレッド面2Aの箇所に当接させる。これにより、デプスゲージ20の測定部によって、弾性板18の当て付け面16とトレッド面2Aの箇所との間に形成される距離がトレッド面2Aに生じる偏摩耗量として測定され表示部に表示される。
(もっと読む)
産業機械
【課題】使用する環境の温度変化や、経時変化などの影響があっても適切に空間精度補正をすることができる産業機械の提供。
【解決手段】産業機械としての三次元測定機1は、ガイド部212と、コラム221とで構成され、Y軸方向に沿って移動する移動機構と、コラム221の角度を検出する2軸角度計32と、移動機構を制御する制御装置4とを備える。制御装置4は、角度誤差取得部42と、パラメータ生成部43と、補正部44とを備える。角度誤差取得部42は、コラム221を移動させたときに2軸角度計32にて検出される角度に基づいて、コラム221の位置に対するコラム221の角度誤差を取得する。パラメータ生成部43は、角度誤差取得部42にて取得されるコラム221の角度誤差をコラム221の位置で積分することで真直度補正パラメータを生成する。補正部44は、パラメータ生成部43にて生成される真直度補正パラメータに基づいて、移動機構の運動誤差を補正する。
(もっと読む)
測定システム
【課題】高速で、振動と測定誤差の少ない座標測定システムを提供する。
【解決手段】座標測定システムの可動サポートに着脱可能に接続されるコネクタを備えるアナログ走査プローブ120であり、走査プローブは、測定軸63に従って当該走査プローブに回動可能に接続される針部28の先端の接触部30と、前記測定軸63についての前記接触部30の傾き角の測定を行う位置エンコーダと、を含み、前記コネクタと前記測定軸63との間に走査プローブ又はプローブの一部を傾けてプローブの走査を可能とする1つの関節64が備えられる。
(もっと読む)
1 - 20 / 148
[ Back to top ]