
Fターム[2F062DD01]の内容
機械的手段の使用による測定装置 (14,257) | 補正、補償、較正、調整 (452) | 補正、補償 (168)
Fターム[2F062DD01]の下位に属するFターム
Fターム[2F062DD01]に分類される特許
1 - 20 / 66
非接触座標測定機の真直度評価方法および真直度評価装置
【課題】
非接触座標測定機の真直度の評価作業に時間が掛からないようにする。
【解決手段】
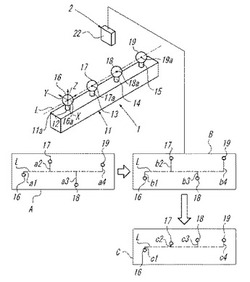
直方体形の基材11と基材11の長さ方向に間隔を介して固定された複数の球体16,17,18,19とからなる評価用標準器1を高精度の接触座標測定機で測定して評価用標準器1の球体16,17,18,19の中心の位置の真直度についての校正値Aを得る第1の手順と、評価する非接触座標測定機2で評価用標準器1を測定して評価用標準器1の球体16,17,18,19の中心の位置の真直度についての測定値Bを得る第2の手順と、測定値Bから校正値Aを引いた補正値Cから非接触座標測定機2の真直度を評価する第3の手順とを実行する。
(もっと読む)
真円度測定装置及びその心ずれ量補正方法

【課題】測定物の母線と検出点とのずれ量である心ずれ量を算出して補正することにより、基準となる測定物の直径値とは異なる直径値を有する測定物であっても正確な直径値を算出する。
【解決手段】測定物の中心と回転の中心を一致させて、測定物を検出器に対して相対的に回転させ、測定物の真円度を測定する真円度測定装置において、基準測定物に対する前記検出器の検出方向と直交する方向に前記基準測定物を移動させる手段と、前記基準測定物を基準位置から前記検出器の検出方向と直交する方向に移動させたときの各位置における検出値の変化量に基づいて、前記基準測定物の母線と前記検出器の前記基準測定物に対する検出点とのずれ量である心ずれ量を算出する手段と、前記算出した心ずれ量に基づいて、任意の測定物の測定値を補正する手段とを備えたことを特徴とする。
(もっと読む)
表面形状測定方法
【課題】表面形状の測定精度が低い。
【解決手段】対象物の表面に触針を接触させた状態で表面上を走査することにより対象物の表面形状を測定する表面形状測定方法であって、対象物の表面にエッジがある場合に、走査の方向について、エッジがあるべき想定位置に対して予め定められた距離だけ離れた設定位置まで、表面上を第1の速度で走査して表面形状を計測する高速走査段階と、走査の方向について、設定位置から想定位置まで、表面上を、第1の速度よりも遅い第2の速度で走査して表面形状を計測する低速走査段階とを備える表面形状測定方法。
(もっと読む)
産業機械
【課題】熱膨張によるラムのZ軸シフト量を高精度に算出可能な産業機械を提供する。
【解決手段】三次元測定機1(産業機械)は、Z軸に沿うコラム221およびサポータ225と、これらの間に設けられたビーム222上で移動可能なスライダ223と、スライダ223にZ軸方向に移動可能に保持されたラム224と、コラム221、サポータ225、及びラム224のそれぞれの温度を検出する温度検出センサー226および温度検出部32と、これらのコラム221、サポータ225、及びラム224の各温度、基準温度におけるこれらの位置関係を示す基準位置データ、及びこれらの熱膨張係数に基づいて、前記Z軸シフト量を算出するシフト量算出部33と、を備えた。
(もっと読む)
測定システム
【課題】高速、かつ少ない振動およびエラーで部品表面の多数の座標ポイント取得できるようにする。
【解決手段】基準表面に対して可動サポートを位置決めするための1つ以上のアクチュエータとを含む測定システムであって、前記可動サポートが、サポートコネクタと、前記可動サポートと取り外し可能に接続された、前記基準表面に位置決めされたワークピースの表面の走査経路にある複数のポイントを測定するための走査プローブと、前記サポートコネクタと相互作用するように配置された、モジュラ回転取り付け具を前記可動サポートに接続させるための第1のコネクタ90、およびプローブコネクタと相互作用するように配置された、前記走査プローブを前記モジュラ回転取り付け具に接続させるための第2のコネクタ40を備えるモジュラ回転取り付け具と、前記第2のコネクタを前記第1のコネクタに対して回転させるためのアクチュエータ58とを有す。
(もっと読む)
モアレ縞を使った変位計測方法
【課題】コンクリート構造物、鋼構造物、土構造物、または岩盤、地盤に発生したひびわれ、亀裂、目地などを対象とし、離れた地点から画像撮影することで高い精度を確保し、安全、簡単かつ迅速な計測を可能とするモアレ縞を利用した変位計測方法を提供する。
【解決手段】モアレ縞を利用して2地点間の微小な相対変位を計測するモアレ縞を使った変位計測方法であって、計測対象に沿うように設置され相互に重ねられた2枚の板状の部品からなる計測装置10の2枚の板状の部品のそれぞれに、空間的に周期構造をもつ格子を表示し、格子同士の光学的な干渉により生じるモアレ縞の移動量を読み取ることで計測対象の変位を計測する。
(もっと読む)
座標位置決め装置を用いて得られる測定値の誤差の補正
測定プローブ(18)を有する座標位置決め装置を操作する方法が記載される。方法は、一連の公称同一の部品の内の第一の部品(24)を選択する工程であって、少なくとも、第一の部品(24)の一つ以上の構造と関連する第一の基準幾何学的特性は知られている工程を含む。また、第一の部品(24)の一つ以上の構造を測定するために、座標位置決め装置を用い、そこから、第一の基準幾何学的特性に対応する、第一の測定幾何学的特性を決定する工程が実行される。それから、第一の基準幾何学的特性と第一測定幾何学的特性との間の差異を記述する、第一の特性補正値が決定される。座標位置決め装置は、それから、一連の公称同一の部品の内の一つ以上の他の部品の一つ以上の構造を測定するために用いられ、各々の他の部品に対して、第一の基準幾何学的特性に対応する、他の測定幾何学的特性が決定される。それから、第一の特性補正値が、各々の他の測定幾何学的特性に適用される。対応する座標位置決め装置が、また、記載される。 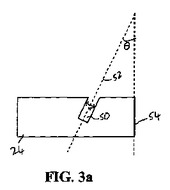 (もっと読む)
(もっと読む)
表面形状の測定方法
【課題】プローブを用いて、容易かつ高精度に被検物の表面形状を測定することができる表面形状の測定方法を提供する。
【解決手段】プローブと被検物とを相対移動させることにより、被検物の表面形状を測定する表面形状測定方法は、被検物の第1の領域の第1表面形状データを取得する第1取得工程と、第1表面形状データと少なくとも一部が重複する被検物の第2の領域の第2表面形状データを取得する第2取得工程と、第1表面形状データのうち、第2表面形状データと重複する領域のデータに対して、近似関数による当てはめを行って近似曲線を取得する近似曲線取得工程S20と、近似曲線を用いて第2表面形状データの補正量を算出する補正量算出工程S30と、算出された補正量に基づいて、第2表面形状データ全体を座標変換する座標変換工程S40と、第1表面形状データと、座標変換が行われた第2表面形状データとを統合する工程とを備える。
(もっと読む)
厚み測定装置及び厚み測定方法
【課題】基準ローラの回転軸の振動に由来する誤差を取り除く。
【解決手段】不可避的に振動する回転軸24に沿って設けられていて、回転軸とともに回転する基準ローラ12と、基準ローラの周面12aに押圧されることにより、基準ローラの回転に従動して回転する検知ローラ14と、基準ローラ及び検知ローラの当接部Tに搬送される被測定媒体Pの厚みと回転軸の振動とに由来する検知ローラの位置変位を生データとして測定する検知部16と、回転軸の振動のみに由来する検知ローラごとの位置変位を、1個の規格化ローラ124の振動により生じた位置変位で規格化した振動規格化データを予め記憶している記憶部18と、被測定媒体の厚みの測定時に得られる検知ローラごとの生データを、記憶部から読み出された振動規格化データに測定時の規格化ローラの位置変位を乗じた補正値で補正する補正部20とを備える。
(もっと読む)
関節プローブヘッド
【課題】関節プローブヘッドの回転軸をロックするためのブレーキを提供する。
【解決手段】支持体に取り付くための第1のマウントと、表面検出装置が取り付け可能な第2のマウントとを備え、第2のマウントが第1のマウントに対し一以上の軸回りに回転可能である関節プローブヘッドにおいて、第1のマウントに対する第2のマウントの一以上の軸回りの位置をロックするための少なくとも一以上の機械式ブレーキが設けられ、これにより、少なくとも一つの位置測定装置が、ロック位置において、第1のマウントに対する第2のマウントの一以上の軸回りの位置を決定すべく設けられる。
(もっと読む)
測定装置
【課題】被検物を高精度に測定する。
【解決手段】測定装置11の傾斜回転テーブル14は、被検物が載置され、回転軸L1を中心に回転駆動する回転テーブル21と、回転テーブル21が回転可能に装着され、水平方向に延びる傾斜軸L2を中心に傾斜駆動する傾斜テーブル22を備える。また、傾斜回転テーブル14は、傾斜テーブル22に対する回転テーブル21の変位を測定する変位センサ31乃至33と、傾斜テーブルの鉛直方向の変位を測定する変位センサ34を備える。本発明は、例えば、傾斜回転テーブルを有する測定装置に適用できる。
(もっと読む)
測定方法及び測定装置
【課題】現場等での測定が可能でありながら、迅速な測定を行える測定装置及び測定方法を提供する。
【解決手段】ゼロ点誤差Δzは、始点と終点におけるプローブMPの傾斜の差αN0から容易に求めることができ、これにより、被測定面全体の形状を精度良く求めることができる。即ち、水準器ELで2回傾斜を読み取るのみでゼロ点誤差Δzを得ることができるから、測定時間の短縮を図ることができ、例えば現場等での作業も容易である。
(もっと読む)
表面形状計測装置、表面形状計測方法、露光装置及びデバイス製造方法
【課題】
被測定物の表面形状を簡便かつ高精度に計測可能な表面形状計測装置を提供する。
【解決手段】
表面形状計測装置は、ウエハ4に塗布されたレジスト5の表面に接触してこの表面の高さ変化に応じて位置が変化する複数の非光学的検出素子1を有する高さ検出器ABPと、非光学的検出素子1に向けて測定光10aを発する光源10と、非光学的検出素子1からの測定光10aの反射光を受光することにより非光学的検出素子1の位置を検出する光検出器9とを有し、高さ検出器ABPは、非光学的検出素子1を保持するための開口20が形成された保持部2を備え、非光学的検出素子1は、保持部2の開口20に固定されずに配列され、レジスト5の表面に接触することにより位置が変化する。
(もっと読む)
支持用部品の取付位置測定具および取付位置測定方法
【課題】支持用部品の取付誤差が大きいS/A部品が次工程に流出することを確実に防止するべく、現状の検査方法の変更を最低限に抑えつつ、支持用部品の取付位置を、容易に短時間で高精度に測定することができる支持用部品の取付位置測定具および取付位置測定方法を提供する。
【解決手段】揺動可能、かつ、その揺動方向が変更可能に支持されるリンク部材11とリンク部材11の変位量を検出する変位計6を備える測定具本体2と、ナット孔50aの位置を代替して示す測定孔3bが形成されるアタッチメント部材3と、からなり、さらにリンク部材11には、プローブ12および検出部13が固設され、プローブ12が測定面3cに当接するときの球面部12aの変位量を、球面部13aの任意の一軸方向に対する変位量として変位計6により測定し、測定面3cの位置を検出して、ナット孔50aの取付位置を検出する取付位置測定具1。
(もっと読む)
歯車の歯面形状の測定装置、測定方法、その方法を実現させるプログラムおよびそのプログラムを記録した記録媒体
【課題】歯車のかみ合い進行方向に沿う歯面形状を高精度に測定できる測定方法を提供する。
【解決手段】歯車のかみ合い進行方向に沿って歯面形状を測定する方法であって、かみ合い進行方向に沿って歯面形状の実測値を測定する工程(S60)と、実測値に以下の式で求められる補正値Ccompを乗じて歯面形状を算出する工程(S70)とを備える。
ただし、CCVは歯形方向の機械精度誤差に対する補正値、CLDは歯すじ方向の機械精度誤差に対する補正値、αは歯形方向とかみ合い進行方向とによって形成される角度、βは歯車の基礎円筒上ねじれ角を表す。
(もっと読む)
三次元測定機
【課題】測定条件を変更した場合であってもプローブの移動量を適切に補正することができる三次元測定機の提供。
【解決手段】三次元測定機は、一定の範囲内で移動可能に構成される測定子を有するプローブと、プローブを移動させる移動機構と、移動機構を制御する制御装置とを備える。制御装置は、移動機構の移動量、及びプローブの移動量に基づいて測定子の位置を算出する測定値算出部53を備える。測定値算出部53は、被測定物を測定するときの測定条件に基づいて、プローブの移動量を補正するための補正パラメータを算出する補正パラメータ算出部531と、補正パラメータに基づいて、プローブの移動量を補正する補正部532と、移動機構の移動量と、補正部532にて補正されたプローブの移動量とを合成することで測定子の位置を算出する移動量合成部533とを備える。
(もっと読む)
産業機械
【課題】制御装置の追従特性を低下させることなく、空間誤差を適切に補正することができる産業機械の提供。
【解決手段】産業機械は、対象物に対して所定の軸方向に沿って移動する測定子と、対象物を載置するとともに、所定の軸と直交する2軸方向に沿って移動させるステージと、制御装置5とを備える。制御装置5は、測定子、及びステージの位置を検出する位置検出部51と、位置検出部51による検出位置を補正する空間誤差補正部52と、空間誤差補正部52にて補正された検出位置の位置指令値に対する偏差に基づいて、測定子、及びステージの位置を制御する位置制御部53と、所定の軸方向における測定子の位置に基づいて、所定の軸と直交する2軸方向における測定子の位置の誤差を算出し、ステージを移動させることで誤差を補正する測定子誤差補正部54とを備える。
(もっと読む)
形状測定装置、及び形状測定方法
【課題】回転テーブルの面振れや、形状測定装置の直角度等に起因する測定誤差を適切に補正することができ、測定精度を向上させることができる形状測定装置の提供。
【解決手段】三次元測定機1は、既知の径を有する基準器に対して設定された基準器座標系で基準器の径を軸方向に沿って測定する基準器測定部51と、基準器測定部51にて測定された基準器の径、及び既知の径の差と、基準器測定部51の測定位置とに基づいて補正関数を生成する補正関数生成部52と、被測定物に対して設定された被測定物座標系で被測定物を測定する測定部53と、測定部53にて測定された測定値を、基準器座標系に変換する第1変換部54と、第1変換部54にて基準器座標系に変換された測定値を、補正関数生成部52にて生成された補正関数にて補正する補正部55と、補正部55にて補正された測定値を、被測定物座標系に変換する第2変換部56とを備える。
(もっと読む)
部分測定を合成する形状測定方法
【課題】 従来、オーバーラップする領域で、測定のミスマッチを最適化していた。しかし測定データが3次元点列の場合オーバーラップ領域を求める時に大きな誤差が発生する。特に干渉計のような参照面を持たない座標測定装置では深刻な課題となる。
【解決手段】 一般に部分測定の合成はパラメータの最適化問題に帰着できる。本発明ではパラメータに次を採用する。(1)座標変換パラメータは被測定物を測定装置にセットする時に混入するセッティング誤差を測定データから除去することができる。(2)形状パラメータは被測定物全体の近似誤差形状を推定し測定データから除去することができる。その結果たとえ測定データが3次元点列であっても残差は小さくなる。小さな残差どおしを比較しても差は小さい。すなわちミスマッチを小さくすることができる。本発明によれば従来のオーバーラップという概念を使わなくても合成できるので従来技術の課題を解決できる。
(もっと読む)
三次元測定機
【課題】プローブを交換した場合や、プローブの姿勢を変更した場合であっても測定値の誤差を適切に補正することができる三次元測定機の提供。
【解決手段】三次元測定機は、プローブ21と、プローブ21を保持するとともに、プローブ21を測定空間内で移動させる移動機構22と、移動機構22を制御するホストコンピュータとを備える。ホストコンピュータは、移動機構22に基準のプローブを保持させたときの基準球231の中心位置から基点BまでのプローブベクトルV1、及び移動機構22にプローブ21Bを保持させたときの基準球231の中心位置から基点BまでのプローブベクトルV2を記憶する記憶部と、プローブベクトルV1、及びプローブベクトルV2に基づいて、基点Bの誤差を補正するための補正ベクトルCVを算出する補正ベクトル算出部と、補正ベクトルCVに基づいて、基点Bの誤差を補正する基点補正部とを備える。
(もっと読む)
1 - 20 / 66
[ Back to top ]