
Fターム[2F062DD22]の内容
機械的手段の使用による測定装置 (14,257) | 補正、補償、較正、調整 (452) | 較正 (162) | 基準値の設定 (115)
Fターム[2F062DD22]の下位に属するFターム
基準体 (97)
Fターム[2F062DD22]に分類される特許
1 - 18 / 18
形状測定方法、これを用いた加工方法、および形状測定装置
【課題】表面形状の設計値が複数の関数によって定義される場合にも、測定データのアライメント補正を行った上で被測定体の表面形状の設計値からのずれ量として測定することができるようにする。
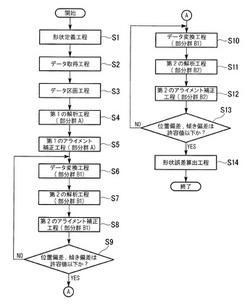
【解決手段】表面形状の設計値を複数の関数で定義する形状定義工程(S1)と、表面形状の測定データを取得するデータ取得工程(S2)と、測定データを関数の定義域ごとの部分群に区画するデータ区画工程(S3)と、部分群による表面形状の設計値からのずれ量を表す移動パラメータを推定する解析工程(S4、S7、S11)と、この移動パラメータを用いて測定データのアライメント補正を行って、補正済測定データを生成するアライメント補正工程(S5、S8、S12)と、補正済測定データと複数の関数との偏差を形状誤差として算出する形状誤差算出工程(S13)と、を備える形状測定方法を用いる。
(もっと読む)
厚み測定方法

【課題】 測定子と測定テーブルとの平行出し作業が不要で、特殊な測定子を用いなくて済み、被測定物の厚み寸法を高精度に測定できるとともに、測定力を調整することもできる厚み測定方法を提供する。
【解決手段】 厚み測定方法は、互いに平行な下端面31A2と上端面31B1とを有する治具本体31および治具本体31に着脱可能に装着され重さが調整可能な補助ウェイト32を有する測定治具3を準備する準備工程と、測定テーブル15に下端面31A2を載置するとともに、上端面31B1に測定子18を当接させ、このときのスピンドル17の移動量を基準位置として設定する基準位置設定工程と、測定テーブル15にフィルム2を載置したのち、このフィルム2の上に下端面31A2を載置するとともに、上端面31B1に測定子18を当接させ、このときのスピンドル17の移動量と基準位置との差からフィルム2の厚み寸法Tを求める測定工程とを備える。
(もっと読む)
三次元測定機の校正方法および校正治具
【課題】回転テーブル座標系の登録を効率よく行えるとともに高精度が確保できる三次元測定機の校正方法および校正治具を提供すること。
【解決手段】 回転テーブル50の座標系を登録するために、少なくとも3つの角度位置で回転テーブル50の表面の基準点の座標位置を測定する。測定には、接触部61として3つの同径の球体65を有し、支持部62として支柱64および基台63を有し、プローブ17の先端球17Aに対して3つの接点で同時に接触する校正治具60を用いる。測定手順として、回転テーブル50の表面に校正治具60を設置し、プローブ17を校正治具60に近接させ、プローブ17の先端球17Aが3つの球体65と同時に接触した状態での座標位置を読み取る。
(もっと読む)
測定システム
【課題】高速で、振動と測定誤差の少ない座標測定システムを提供する。
【解決手段】座標測定システムの可動サポートに着脱可能に接続されるコネクタを備えるアナログ走査プローブ120であり、走査プローブは、測定軸63に従って当該走査プローブに回動可能に接続される針部28の先端の接触部30と、前記測定軸63についての前記接触部30の傾き角の測定を行う位置エンコーダと、を含み、前記コネクタと前記測定軸63との間に走査プローブ又はプローブの一部を傾けてプローブの走査を可能とする1つの関節64が備えられる。
(もっと読む)
プレス金型の動的変形測定方法および装置
【課題】プレス金型にセンサを取り付けることなく、プレス成形時におけるプレス金型の動的変形を高精度で測定し得るようにする。
【解決手段】プレス金型の動的変形測定装置は、下金型13および上金型14を備えたプレス金型11と、ボルスタ16およびスライダ17を備えたプレス機本体10との間に着脱自在に配置される測定治具本体33を有し、プレス成形時におけるプレス金型11の動的変形を測定する。測定治具本体33に両端部が滑り支持された水平棒材41には、プレス金型11の弾性変形量を検出するための渦電流変位センサが設けられている。測定治具本体33に設けられた荷重受け駒36には、プレス金型11の圧力分布を検出するための歪みゲージが設けられている。
(もっと読む)
眼鏡枠形状測定装置
【課題】高カーブフレームのレンズ枠の形状を精度良く測定し、高カーブフレームの測定時に測定子がレンズ枠の溝から外れ難くする。
【解決手段】針状の先端形状を持つ測定子281の移動位置を検知してレンズ枠の動径方向(XY方向)及び動径方向に垂直な方向(Z方向)の三次元形状を測定する眼鏡枠形状測定装置は、測定子281が取り付けられた測定子軸282を持ち、測定子軸282を測定子281の先端方向に傾斜可能に保持すると共に、測定子軸282をZ方向に移動可能に保持する測定子保持ユニットと、Z移動手段と、測定子のZ位置を検知するZ位置検知手段と、Z移動ユニットの駆動を制御する制御手段と、測定子保持ユニットのZ方向の位置情報及びZ位置検知手段の検知情報に基づいてレンズ枠の動径形状に対応するZ方向の形状を求める演算手段とを備える。
(もっと読む)
物体検出装置
【課題】検出精度及び分解能に優れて小型化可能な検出装置を低コストで提供する。
【解決手段】基準面に基づいて対象物の厚さ又は一定方向の移動量を検出する装置であって、一端が回転軸3に支持され、基準面又は対象物と当接可能な曲面を他端に有し、対象物の当接に伴って揺動するレバー部1と、前記回転軸3に支持され、レバー部1の揺動に応じて変位可能な変位量伝達部2とを備えるものにおいて、前記曲面が、想定範囲の対象物の当接に伴って揺動する間は基準面と直交する一つの直線V上にほぼ一致する点で対象物と当接するように加工されていることを特徴とする。
(もっと読む)
デジタル内空変位計
【課題】従来測定が困難であった場所でも比較的容易に測定可能なデジタル内空変位計を提供する。
【解決手段】坑道等の内部空間の長さ測定を行うデジタル内空変位計であって、比較的小形の本体部2と、本体部に接続された更に小形のセンサユニット4と、センサユニットからの測定データを表示するデジタル表示器6とを備え、本体部内部に比較的大きな径部17wと比較的小さな径部17nをもつ回転軸17と、複数個の一定の引っ張り張力を発生する複数個の張力発生器19−1〜19−4とを有し、回転軸大径部にはN極及びS極が所定の周期で交互に着磁された磁気テープ8が巻かれており、回転軸小径部には各々の張力発生器からの帯状スプリングが巻かれており、長さ測定時には複数個の張力発生器からの一定の引っ張りトルクが前記回転軸の比較的小さな径部に加わって磁気テープは一定の張力で引っ張られる。
(もっと読む)
形状測定装置、形状測定方法、及びプログラム
【課題】簡易な構成で高精度に回転体からなる被測定物に特有の測定が可能な形状測定装置、その方法、及びプログラムを提供する。
【解決手段】形状測定装置は、回転体からなる被測定物4を所定の回転軸を中心として回転させながら、被測定物4の各回転角における表面の変位を測定する。形状測定装置の制御部41は、被測定物4の各回転角における表面の変位を予備測定する(S11)。制御部41は、予備測定によって取得された被測定物4の表面形状を示す測定値と予め記憶されている被測定物4の設計値とから測定値の設計値に対するずれ量を算出する(S12)。制御部41は、算出されたずれ量に基づいて被測定物4の姿勢を調整する(S13)。制御部41は、姿勢調整後の被測定物4を回転軸を中心として回転させながら、被測定物4の各回転角における表面の変位を本測定する(S14)。
(もっと読む)
歯面測定基準設定装置および歯面測定基準設定方法
【課題】傘歯車の歯面に基づいて傘歯車の外部に傘歯車の測定基準を設定することが可能な歯面測定基準設定装置および歯面測定基準設定方法を提供する。
【解決手段】
傘歯車1に形成される歯溝に嵌合する嵌合部材111・111・111および三つの嵌合部材111・111・111における傘歯車1の歯溝との嵌合部位を結んだ仮想平面30に平行な第一基準面115aが形成される本体部材114を備える第一部材110と、第一部材110に係合しつつ第一基準面115aに垂直な方向に摺動可能であり第一部材110に係合しているときに第一基準面115aに平行な第二基準面123aが形成され三つの嵌合部材111・111・111が互いに異なる歯溝に嵌合した傘歯車1が固定される第二部材120と、を具備する歯面測定基準設定装置100により設定された第二基準面123aを基準として傘歯車1の歯面6・6・・・を測定する。
(もっと読む)
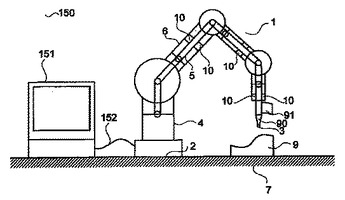
ロボットのツール位置検出方法、ロボットと対象物との相対位置検出方法、及びそれらの装置
【課題】ツール位置やロボットと対象物との相対位置を簡単かつ高精度に検出する。
【解決手段】ロボット2のアーム7先端のツール取付部7eに球面部8aを有するツール8を取り付け、ツール取付部7eから球面部8aの中心までのツールベクトルの成分に未知数を設定し、球面部8aを平板16に対してツール8の姿勢を変えて少なくとも未知数の数と同じ回数当接させ、その当接時のロボット2のアーム7の関節角度に基づいて当接時のツール取付部7eの位置をそれぞれ求め、特定の座標系において、平板16のZ位置と球面部8aの曲率半径Rcとの和から得られる球面部8aの中心のZ位置が、ツール取付部7eのZ位置とツールベクトルのZ成分との和から得られる球面部8aの中心のZ位置に等しいことを意味する連立方程式を少なくとも未知数の数と同じ回数連立させ、その連立方程式を解くことでツールベクトルの成分を求める。
(もっと読む)
多関節型座標測定装置のパラメータ校正方法
【課題】 測定アームのパラメータの校正作業に要する手間や時間を削減することのできる多関節型座標測定装置のパラメータ校正方法を提供する。
【解決手段】 まず、二つの小球22を有する標準器20Aを測定アーム2の操作空間内に設置し、測定アーム2を操作してプローブ3をそれらの小球22に近づけて複数のアーム姿勢で小球22の各々の空間座標を測定し、その測定結果に基づいて一次校正パラメータについてのパラメータ校正処理を行う。つぎに、一つの小球22を有する標準器20Cを測定アーム2の操作空間内に設置し、測定アーム2を操作してプローブ3をその小球22に近づけて複数のアーム姿勢で小球22の空間座標を測定し、その測定結果に基づいて二次校正パラメータについてのパラメータ校正処理を行う。
(もっと読む)
誤差補正方法、誤差補正装置、及び誤差補正プログラム
【課題】運動誤差の補正を高精度に行える方法を提供する。
【解決手段】予め基準ワーク32を形状測定して得ておいた校正値信号を用いて測定ワーク40を形状測定して得られた測定値信号から運動部26の運動誤差による測定誤差を除去する方法において、該校正値信号は固定部30に対し該運動部26を相対運動しながら該基準ワーク32を形状測定した際の検出器36出力信号から該基準ワーク形状成分を除去したものであり、該測定値信号は該固定部30に対し該運動部26を相対運動しながら該測定ワーク40を形状測定した際の該検出器36出力信号から該測定ワーク形状成分を除去したものであり、該校正値信号を用いて該測定値信号に含まれる成分のうち該校正値信号と最も形状相関の高い成分を運動誤差成分として適応的に除去する工程(S10)を備えたことを特徴とする誤差補正方法。
(もっと読む)
表面測定プローブ
表面測定プローブのドリフトを判定する装置および方法。この表面測定プローブは、ハウジングと、表面接触スタイラスと、スタイラスを振動させる振動発生器と、スタイラスの振動の変化に関係したパラメータを決定する感知デバイスと、パラメータとしきい値との関係を判定する比較器とを有する。スタイラスが表面と接触していないときにパラメータの読みが読み取られ、表面に触れたときの遷移時間よりも有意に長い時間tにわたってこのパラメータの読みが平均される。このパラメータの読みの平均が基準パラメータと比較される。この比較が、パラメータの有意のドリフトがあったかどうかを判定するために使用される。このようにして、温度変化に起因したドリフトが補正される。 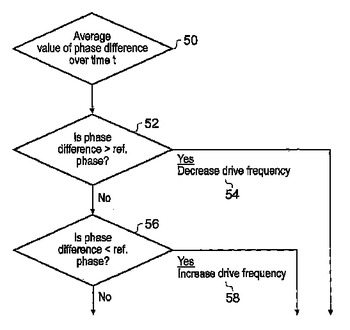 (もっと読む)
(もっと読む)
差分較正
機械に装架された計測プローブ(10)を較正する方法が記述される。計測プローブ(10)は、ワークピースに接触する先端(16)を備えたスタイラス(14)を有する。方法は、プローブアウトプット(a、b、c)を機械座標系(x、y、z)に関連づけるプローブ較正マトリクスを決定することを含む。方法は、第一の機械データを得るために第一のプローブ偏位(d1)を用い、第二の機械データを得るために第二のプローブ偏位(d2)を用いて、較正アーティファクト(18)を走査する工程を含む。第一および第二の機械データは、いかなる機械誤差も実質的に除去される完全なプローブ較正マトリクスを得るために用いられる。有利には、方法は、第一および第二の機械位置データの差は既知であるとの仮定に基づいて、完全なプローブマトリクスを数学的に決定する。  (もっと読む)
(もっと読む)
座標測定装置、方法、コンピュータプログラムプロダクト
本発明は、部材(7)上の各測定値を、偏向可能な接触探知ピン(6)を備えた測定接触探知ヘッド(5)を有する座標測定装置を用いて測定するための方法であり、その際、座標測定装置により、各パラメータ(A)を用いて、測定接触探知ヘッド(5)によって検出された単数乃至複数の偏向信号を、当該座標測定装置の座標系(XM,YM,ZM)内でリニア又は非リニアに写像(変換)することができる。方法を、任意に測定する接触探知ヘッド、殊に、接触探知ピンが座標方向に可動に案内されない接触探知ヘッドにも使用することができるようにするために、各パラメータの少なくとも一部分(Aanti)を用いて、接触点において、部材の表面に対して接線方向に位置している、接触探知ピン偏向の各成分を記述する。  (もっと読む)
(もっと読む)
外骨格を有するCMMアーム
ベース端及びプローブ端を有する内部CMMアームと、複数の伝達手段を介して内部CMMアームを駆動する外骨格とを備える、外骨格を有するCMMアームの装置が提供される。1つ又は複数の接触プローブ、光学プローブ、及び工具が、プローブ端に取り付けられる。外骨格を有するCMMアームは、手動操作可能な実施形態及び自動実施形態で提供される。外骨格を有するCMMアームは、高精度測定のため、又は高精度動作を行うために動作可能である。外骨格を有するCMMアームの動作の方法が提供される。
 (もっと読む)
(もっと読む)
簡易球面計の基準高さ合わせ方法およびその装置
【課題】 多種多様な曲率に対応した個々の球面原器を用いることなく簡易球面計の基準高さ合わせを可能にし、従来と同様に球面形状や曲率の測定を行うことを可能にする簡易球面計の基準高さ合わせ方法およびその装置を提供する。
【解決手段】 リング4が接する対リング基準面11を固定的に配設するとともに測定子3が接する対測定子基準面12をマイクロメータ13によって対リング基準面11に対して相対的に上下方向に移動しうるように配設した基準高さ合わせ装置10を用い、計算により求められる基準となる球面の頂点から弦までの高さに基づいて、マイクロメータ13によって対測定子基準面12の上下方向の位置を設定する。これらの対リング基準面11と対測定子基準面12に簡易球面計1のリング4および測定子3をそれぞれ当接させて、球面原器を使用することなく簡易球面計1の基準高さ合わせを行う。
(もっと読む)
1 - 18 / 18
[ Back to top ]