
Fターム[2F062FF05]の内容
機械的手段の使用による測定装置 (14,257) | 走査 (1,305) | 走査方向 (1,174) | 検出部が移動するもの (846) | 三次元 (208)
Fターム[2F062FF05]に分類される特許
1 - 20 / 208
光学センサ付きの表面検出装置
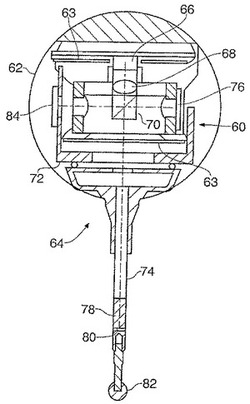
【課題】スタイラスの変位を正確に測定すること。
【解決手段】位置測定装置に用いる表面検出装置は、測定すべきワークピースの表面を走査するためのチップ82をもつ長いスタイラス74を有する。スタイラスチップの横変位は、光源66から逆反射体(retroreflector)78にスタイラスに沿って通過するライトビームによって測定される。これは、ビームを反射して、ブームスプリッタ70を介して位置高感度検出器76に戻す。スタイラスは、キャリッジ72に縦変位のために設置される。その縦変位は、ビームスプリッタ70によって、第2の位置高感度検出器84に投光される他のライトビームによって測定される。
(もっと読む)
三次元位置測定構造

【課題】測定作業の効率化および測定精度の向上に資することが可能な測定マーカを提供する。
【解決手段】三次元位置測定器102を使用して被験者104の身体の各部位から位置データを取得する三次元位置測定構造100であって、三次元位置測定器102のプローブ116の先端に設けられた球形のボール部と、プローブ116に取り付ける長尺なジグ部材110と、被験者104の身体の各部位に取り付けられる磁性を有するマーカ部材106とを備える。上記のジグ部材110は、一端に設けられボール部と連結してボールリンクを形成するホルダ部112と、他端に設けられた磁性を有する球体部114とを有する。
(もっと読む)
サイドフェーススプラインの形状測定用の基準設定具、並びにこれを用いた形状測定装置及び方法
【課題】サイドフェーススプラインの被動歯の形状を測定するために適切な基準を設定することができる基準設定具を提供する。
【解決手段】車両用ハブユニット1の軸方向の端面に形成され、かつ等速ジョイントの駆動歯14に噛み合わされる被動歯の形状を測定するために使用される、サイドフェーススプライン15の形状測定用の基準設定具50である。この基準設定具50は、等速ジョイントの駆動歯14の形状を模して円環状に配列して形成された基準歯53と、当該基準歯53に対して所定の関係を有するとともに、当該基準歯53を前記被動歯に噛み合わせた状態で当該被動歯の形状測定の基準位置を設定するために用いられる基準面51,52と、を有している。
(もっと読む)
被較正疑似品
【課題】関節プローブヘッドを較正するための被較正疑似品を提供する。
【解決手段】座標位置決め機械のアームに関節プローブヘッドが取り付けられたときに前記関節プローブヘッドを較正するための被較正疑似品100であって、前記関節プローブヘッドを前記座標位置決め機械の前記アームに対し関節動作させることによりスキャンされることが可能な、異なる寸法の複数の輪郭102、104、106と、前記複数の輪郭102、104、106を、前記座標位置決め機械の異なる方向に沿って向けることができるよう、前記複数の輪郭102、104、106の向きを変えるための割り出し装置と、を備える被較正疑似品100。
(もっと読む)
関節式プローブヘッド
【課題】高速走査を精度と共に達成するため、測定システムの運動質量、動的誤差を最小にする関節式プローブヘッドを提供する。
【解決手段】CMMは、その直線駆動に関する回転誤差(例えばピッチ,ロールおよびヨー)のための誤差マップが作成される。走査ヘッドもまた、回転誤差のための誤差マップが作成される。測定データは、CMMおよび走査ヘッドの組み合わされた回転誤差に関して実時間に同期して誤差補正される。この同期補正ためCMMおよび走査ヘッドの誤差マッピングデータを使用する。
(もっと読む)
多関節型座標測定装置
【課題】多関節型測定アームに測定誤差要因となるストレスがかからない測定姿勢を維持させる。
【解決手段】測定アームの各関節の角度に基づき、1)測定アームの第1リンクと第2リンクがなす角度が所定値を超えて180°に近づいた、2)手首関節からアーム支点への距離が所定値を超えて遠くなった、3)バランサーにより発生される力に基づいて定められる所定範囲を超えて第2リンクが曲げられた、のいずれかの条件が成立した場合、ユーザへの警告を行ない、専用プロセッサからの空間座標値の出力を中止する。
(もっと読む)
ワーク保持装置及び、このワーク保持装置を備えた3次元形状測定装置
【課題】精密なワークでも保持可能なワーク保持装置及びこのワーク保持装置を使用した3次元形状測定装置を提供する。
【解決手段】ワーク保持装置3は、ワークWを保持する回転ヤトイ31と、ベース部材32と、回転昇降機構33と、を有する。回転昇降機構33は、支持部34を上昇させ回転ヤトイ31の背面31Rと接触させ、この回転ヤトイ31をベース部材32から浮かせた状態で回転させる。また、支持部34を下降させ、回転ヤトイ31をベース部材32に着座させた状態でワークWの測定を行う。
(もっと読む)
改良された関節式アーム
【課題】高い正確度、高い信頼性および耐久性、相当な
使い易さ、ならびに低コストを有する間接式アームを提供する。
【解決手段】関節式アームCMM1は、複数の伝達部材20と、少なくとも2つの伝達部材20を互いに接続する複数の関節部材30〜36と、遠端における座標取得部材50と、近端におけるベース10とを備える。関節部材30〜36の少なくとも2つは、少なくとも1つのエンコーダを備えることが可能であり、少なくとも2つのエンコーダは、ともに、単一のモノブロックハウジング内に収容されることが可能である。
(もっと読む)
表面形状測定プローブおよびその校正方法
【課題】マスターボールによるスタイラス先端座標の校正を行うことができる表面形状測定プローブおよびその校正方法を提供すること。
【解決手段】表面形状測定プローブ30のスタイラス31の近傍に校正用接触子35を装着し、スタイラス31の先端と校正用接触子35とのオフセットOFSを測定し、校正用接触子35で三次元測定機の基準器であるマスターボール17を測定して校正用接触子35の座標位置を割り出し、校正用接触子35の座標位置にオフセットOFSを加算してスタイラス31の先端の座標位置を割り出す。
(もっと読む)
幾何誤差同定装置
【課題】ミス値を取得してしまったとしても、ミス値を用いることなく幾何誤差の同定を行うことにより、ミス値を用いることによる幾何誤差の同定精度の低下を防止することができる幾何誤差同定装置を提供する。
【解決手段】計測値(たとえばターゲット球の直径の計測値)と(S4)、設定値(予め設定されている直径)とを比較することにより(S5)、計測値が正しい計測値であるか否かを判断し、たとえミス値を取得したとしても当該ミス値を用いることなく、正しい計測にもとづく計測値のみを用いて幾何誤差の同定を行うため(S10)、幾何誤差の同定精度を従来と比較して向上することができる。
(もっと読む)
形状測定装置、形状測定方法、及びそのプログラム
【課題】検出部を被検物に対して移動させて測定位置毎に停止させて測定する場合の測定速度を向上させることができる形状測定装置を提供する。
【解決手段】形状測定装置は、被検物に対しての相対位置が変更されて被検物の表面の形状を検出する検出部(20)と、検出部により検出された被検物の表面の形状の変位を示す情報に基づいて、被検物に対して検出部が相対的に静止しているか否かを判定する判定部(静止判定部58)と、判定部により検出部が相対的に静止していると判定された場合の形状に基づいて、被検物の表面の形状データを算出する算出部(座標算出部53)と、を備える。
(もっと読む)
タッチプローブ
【課題】細穴の奥や突起部を有するような被測定物でも高精度、かつ高速に測定を行うタッチプローブを提供する。
【解決手段】プローブ本体12と、前記プローブ本体12の先端部に形成された、被測定物と接触する測定子14と、前記プローブ本体12内に形成され、前記プローブ本体12の軸方向に垂直でかつ互いに直交する2方向に変位可能に構成された変位機構と、前記2方向の各変位を検出する前記変位機構に設けられた変位検出部25
a、25bと、を備えたことを特徴とするタッチプローブ1を提供する。
(もっと読む)
座標測定装置
【課題】座標測定装置を用いて一連のワークピースを測定して検査するに際し、迅速かつ高速度に測定を実施しつつも、正確な測定結果を得ることを可能にする。
【解決手段】座標測定装置上で較正済み加工品を高速測定する工程(28)と、較正済み加工品と測定された加工品との間の差に対応する誤差マップを生成する工程(30)と、続くワークピースを同じ高速度で測定する工程(34)と、当該続くワークピースの測定値を誤差マップを用いて補正する工程(36)と、を実行するよう座標測定装置を構成する。加工品とは、ワークピースの一つであってもよい。
(もっと読む)
計測装置
【課題】装置の高コスト化を抑えながら、被検面の形状を高精度に計測することができる技術を提供する。
【解決手段】被検物を保持する保持面を含む保持部と、被検面と被検面の形状を計測するための基準となる基準位置との間の距離を計測する距離計測部と、基準位置が被検面に沿うように距離計測部を駆動する駆動部と、駆動部によって駆動される距離計測部の基準位置を測定する位置測定部と、距離計測部によって計測された被検面と基準位置との間の距離と位置測定部によって測定された基準位置とに基づいて被検面の形状を算出する処理部と、を有し、位置測定部は、距離計測部に配置されて互いに異なる測定軸を有するレーザ干渉計と、レーザ干渉計のそれぞれからの光をそれぞれ反射する基準ミラーとを含み、レーザ干渉計の原点と基準ミラーとの間の距離を測定することで基準位置を測定し、基準ミラーの法線が保持面を含む面に交差するように配置される。
(もっと読む)
形状測定装置及び形状測定方法
【課題】 接触式プローブによって、垂直に近いような急傾斜面であっても、安定して接触力を制御し、高精度な形状計測を行う。
【解決手段】 接触式プローブを被測定物の表面に沿って移動させることで、被測定物の表面形状を測定する形状測定方法において、プローブに加わる接触力の分力の大きさにより、被測定面の傾斜を推定し、垂直に近い状態であると判断するとプローブ支持手段の移動方向に交差する方向にプローブ支持手段を移動させる。
(もっと読む)
形状測定装置
【課題】プローブの撓みの影響を受けずに高精度の形状測定を行う。
【解決手段】プローブ先端部3に一体に平面ダイクロイックミラー10及び球面ミラー16を設ける。オートコリメータ光学系5により平面ダイクロイックミラー10の傾斜量を測定し、並進移動量測定光学系12により球面ミラー16のX,Y軸方向のずれ量を測定する。ずれ量算出部42bは、測定した平面ダイクロイックミラー10の傾斜量及び球面ミラー16のずれ量に基づいて、プローブ先端部3において被測定物4の表面に接触する接触点となる球19の基準位置に対するX,Y軸方向のずれ量を算出する。推定部42cは、ずれ量算出部42bにより算出されたずれ量から、プローブ先端部3の球19のX,Y軸方向の位置を推定する。
(もっと読む)
制御装置、および測定装置
【課題】制御性能を向上させる制御装置、および測定装置を提供する。
【解決手段】駆動制御回路3は、測定子を変位させる駆動機構25を駆動制御し、駆動機構25に流れる電流を検出する電流検出センサ27と、駆動機構25を駆動させる駆動速度に応じた目標電流を設定する速度制御部32と、目標電流および電流検出センサ27により検出された検出電流の電流偏差に、積分ゲインおよび比例ゲインをかけて駆動機構25に出力する出力電流を設定する電流制御部33と、を具備し、電流制御部33は、駆動機構25の駆動速度に応じて、積分ゲインおよび比例ゲインのうちの少なくともいずれか一方を切り替える。
(もっと読む)
形状測定装置及び方法
【課題】 プローブによって、垂直へ切り立った壁面や穴の内面であっても、安定して接触力を制御し、高速な形状計測を行うこと。
【解決手段】 接触式プローブを被測定物の表面に沿って移動させることで、被測定物の表面形状を測定する形状測定方法において、プローブに加わる接触力の分力の大きさにより、被測定面と移動手段の方向の関係を推定する。その結果、被測定面と垂直に近い状態であると判断された方向の移動手段のみによって、プローブの接触力制御を行うこと。
(もっと読む)
接触式形状測定装置
【課題】 回折光学素子のように段差を有する光学素子であっても、高精度に面形状を測定することができる接触式形状測定装置を提供する。
【解決手段】 被測定面を安定して倣い走査している状態のプローブ速度である目標速度と、目標速度とプローブ速度の差であるプローブ速度エラーに基づいて、プローブに作用力を加える。これにより、安定して倣い走査している状態のプローブ速度を目標にして、プローブに作用力を加えるため、不安定な測定区間を短縮することができる。
(もっと読む)
ワーク寸法計測装置及びワーク寸法計測方法
【課題】計測精度の向上を実現したうえで、寸法計測から計測後の検査記録作成までの作業コストの低減及び作業時間の短縮を実現でき、平坦度や捻れ等の三次元データをも得ることが可能であるワーク寸法計測装置及びワーク寸法計測方法を提供する。
【解決手段】セグメントWの寸法を計測するワーク寸法計測装置1であって、多関節アーム12を具備して、アーム12の先端に有する探触子11をセグメントWに接触させることで三次元座標値を得る複数の測定機10と、複数の測定機10の相対位置関係を校正する作業及び該複数の測定機10で得られた各三次元座標値に基づいてセグメントWの寸法を自動算出する作業を行う校正演算手段21と、校正演算手段21からの校正結果及び演算結果に基づいてセグメントWの寸法計測結果を評価する計測評価手段22と、計測評価手段22からの計測結果を検査記録にまとめて出力するデータ管理手段31を備えている。
(もっと読む)
1 - 20 / 208
[ Back to top ]