
Fターム[2F062FF28]の内容
機械的手段の使用による測定装置 (14,257) | 走査 (1,305) | 走査の種類 (130) | 走査経路を設定するもの (96) | 被測定物表面に基づくもの (75)
Fターム[2F062FF28]に分類される特許
1 - 20 / 75
眼鏡枠形状測定装置

【課題】測定機構への埃の進入を軽減する。
【解決手段】フレーム保持手段100が、左右のリムRIL、RIRを挟み込んで保持する第1スライダー102及び第2スライダー103を有し、クランプピン230a、230bを持つ左リムクランプ機構とクランプピン230a、230bを持つ右リムクランプ機構とがそれぞれ第1スライダー102及び第2スライダー103に配置され、第1スライダーが左右のリムの上側に当接する第1面1021を有し、第2スライダーが左右のリムの下側に当接する第2面1031を有する。フレーム保持手段は、第1面と第2面との間隔が変化する方向に第1スライダー及び第2スライダーを移動可能に保持する移動手段であって、第1面と第2面とが接触される第1状態と、左右のリムを保持するために第1面と第2面とが離された第2状態と、に切換え可能に構成されている。
(もっと読む)
計測装置、計測方法、プログラム、および、記録媒体

【課題】被計測物の周囲の形状を手軽に計測する。
【解決手段】バンドは、互いに平行な連結軸であるジョイントを介して複数のパネルが連結され、ジョイントを軸にして隣接するパネル間の角度であるパネル間角度を調節可能である。各ジョイントには、パネル間角度を検出する角度センサが設けられている。そして、検出された各パネル間角度に基づいて、バンドが装着された被計測物の周囲の少なくとも一部の形状である周囲形状が計測される。本技術は、例えば、腹囲計測装置に適用できる。
(もっと読む)
ボールねじの測定装置および測定方法
【課題】ボールねじナットの内周面の溝形状の検査を容易且つ短時間で行う。
【解決手段】ボールねじナットを回転テーブル22により回転自在に支持するとともに、その回転角度をロータリエンコーダ23で測定し、測定子3をXYZテーブル12により、XYZ方向に移動自在に支持するとともに、測定子3がボールねじナットの方向に移動するX軸方向の変位をリニアゲージ13により測定し、測定子3が上下に移動するZ軸方向の変位をダイヤルゲージ14により測定する。これらセンサの検出信号をもとに、ボールねじナットにおける測定子3の位置座標を演算し、位置座標をもとにボールねじナットの各部の測定を行う。
(もっと読む)
形状測定方法及び形状測定装置
【課題】回折光学素子のように滑らかでない面の形状を高精度に測定する。
【解決手段】プローブを第1の走査軌跡に沿って走査させて第1の測定データを得る。次に、プローブを、第1の走査軌跡と所定の分解能の同じ範囲を通り、第1の走査軌跡と反対向きの走査方向を有する第2の走査軌跡に沿って走査させて第2の測定データを得る。これらの測定データの安定区間と不安定区間とを抽出する。そして、安定区間の測定データを選択し、選択後の測定データに基づいて面形状を演算する。これにより、滑らかでない面の形状を高精度に測定できる。
(もっと読む)
接触式形状測定装置
【課題】 回折光学素子のように段差を有する光学素子であっても、高精度に面形状を測定することができる接触式形状測定装置を提供する。
【解決手段】 被測定面を安定して倣い走査している状態のプローブ速度である目標速度と、目標速度とプローブ速度の差であるプローブ速度エラーに基づいて、プローブに作用力を加える。これにより、安定して倣い走査している状態のプローブ速度を目標にして、プローブに作用力を加えるため、不安定な測定区間を短縮することができる。
(もっと読む)
3次元表面形状算出装置およびそれを用いた自動施工装置ならびにその方法
【課題】1回の走査で精度よく測定対象表面の3次元表面形状を算出することができる3次元表面形状算出装置を提供する。
【解決手段】3次元表面形状算出装置1は、センサ基台6と、先端に球形状を1方向に移動できる変位センサ2と、原点を定めた3次元空間で平面方程式算出点22を囲む3点の接触点に変位センサ2を接触させてセンサ基台6を移動させる演算部8とを備え、演算部8は、センサ球2の移動距離である変位信号200およびセンサ基台6の原点からの方向ならびに距離を用いて3点の球中心座標を求め、1点の球中心座標から他の2点の球中心座標へ向かう2つのベクトルの外積である法線ベクトルの単位ベクトルに球形状の半径を乗したベクトルを求め、このベクトルを球中心座標に加えて接触点の座標を求め、この接触点の座標が囲む平面方程式を算出する。
(もっと読む)
工作機械用測定方法
【課題】本発明は、工作機械上の被加工物を測定する方法及び装置を提供する。
【解決手段】工作機械において、プログラム(12)は、被加工物Wの特徴を測定する走査プローブまたはアナログ・プローブPからデータを受け取る。このデータは、走査移動中に、前提の機械位置データと組み合わされる。このことは、実際に測定された位置データを得るために、サーボ・フィードバック・ループ(24)に割り込まなければならないことを防止する。前提の機械位置データは、走査移動を制御する部品プログラム(20)から引き出される。また、いくつかの方法で前提の機械位置の値と実際の値との間の誤差を補償する。
(もっと読む)
形状測定装置
【課題】測定子の位置を適切に制御することができ、測定子が非接触か否かを適切に判断することができる形状測定装置の提供。
【解決手段】三次元測定機1は、測定子を有するプローブ21と、プローブ21を移動させる移動機構22と、ホストコンピュータ5とを備える。ホストコンピュータ5は、測定子の移動量を取得する移動量取得部52と、測定子を非接触とした状態における基準位置からの測定子の移動量を偏差として取得する偏差取得部54と、偏差取得部54にて取得される偏差が第1の閾値より大きいか否かを判定する判定部55と、判定部55にて偏差が第1の閾値より大きいと判定されると、基準位置と、偏差とを合成した位置に基準位置を更新する更新部56とを備える。
(もっと読む)
表面性状測定機
【課題】スタイラスの交換時期を適正に知らせることができる表面性状測定機を提供する。
【解決手段】操作キー51〜58によって入力されたしきい値を記憶するしきい値記憶部64と、スタイラス33のトレース方向の移動距離を検出するスタイラス移動距離検出器36と、このスタイラス移動距離検出器によって検出されたスタイラスの移動距離を累積記憶する累積移動距離記憶部65と、しきい値記憶部64に記憶されたしきい値と累積移動距離記憶部65に記憶された累積移動距離とを比較し、累積移動距離がしきい値を超えたときにスタイラスの交換を表示器41に表示する報知手段(制御手段70)とを備える。
(もっと読む)
多機能座標測定機
可搬型の関節アーム座標測定機(AACMM)が、反対側にある第1の端部および第2の端部を有する手動で位置付けることが可能なアーム部であって、接続されたアームセグメントを含み、各アームセグメントが、位置信号を生成するための少なくとも1つの位置トランスデューサを含む、アーム部と、AACMMの第1の端部に装着された測定デバイスと、トランスデューサからの位置信号を受信し、測定デバイスの位置に対応するデータを提供する電子回路とを含む。可搬型のAACMMを実装することが、データが送信される送信経路を判定することによって、データが受信される送信元デバイスを特定するステップであって、送信元デバイスが、AACMMの第1の端部に取外し可能なように装着される、ステップと、送信元デバイスの特定情報に基づいてデータのデータタイプを判定するステップと、データタイプに応じてデータに対してアクションを実行するステップと、アクションを実行した結果を送信先デバイスに出力するステップとを含む。 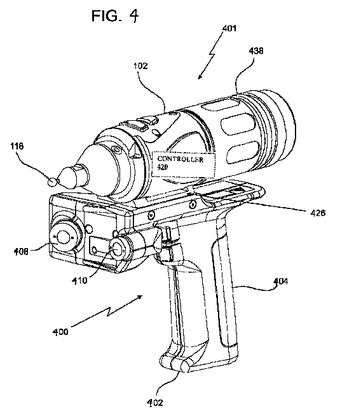 (もっと読む)
(もっと読む)
眼鏡枠形状測定装置
【課題】高カーブフレームのレンズ枠の形状を精度良く測定し、高カーブフレームの測定時に測定子がレンズ枠の溝から外れ難くする。
【解決手段】針状の先端形状を持つ測定子281の移動位置を検知してレンズ枠の動径方向(XY方向)及び動径方向に垂直な方向(Z方向)の三次元形状を測定する眼鏡枠形状測定装置は、測定子281が取り付けられた測定子軸282を持ち、測定子軸282を測定子281の先端方向に傾斜可能に保持すると共に、測定子軸282をZ方向に移動可能に保持する測定子保持ユニットと、Z移動手段と、測定子のZ位置を検知するZ位置検知手段と、Z移動ユニットの駆動を制御する制御手段と、測定子保持ユニットのZ方向の位置情報及びZ位置検知手段の検知情報に基づいてレンズ枠の動径形状に対応するZ方向の形状を求める演算手段とを備える。
(もっと読む)
スタイラス及び接触式変位センサ
【課題】被検物の表面付近まで安全に接近させることができるスタイラスを提供する。
【解決手段】先端部12を被検物Sに接触させて被検物Sの表面を追従させることにより、被検物Sの表面形状を測定するためのスタイラス10は、先端部12の先端12Aよりも前方の所定位置Pを通るように光Lを照射する発光部13と、発光部13から照射された光Lが反射された反射光L1を検知する受光部14とを備えることを特徴とする。
(もっと読む)
測定装置
【課題】微粒子の接触体を用いて、矩形溝形状を有するマイクロマシン等の三次元形状を高精度で測定する。
【解決手段】接触体6は、可撓性の支持部材5と透明な固定部材4によってプローブ本体9に連結される。対物レンズ3にてレーザ光Gを集光させ、接触体6の底面に焦点を合わせて光放射圧によって接触体6を被測定物13の表面に接触させる。レーザ光Gを音響光学偏向器2によって偏向させることで、接触体6を任意の方向に振動させることができる。被測定物13が矩形溝形状を有する三次元構造体であっても、接触体6の振動方向を調整することで高精度な形状測定を行うことができる。
(もっと読む)
玉型形状測定装置
【課題】レンズの溝に直接接触子を挿入し、レンズの溝形状に対しても測定を行い、溝が描く湾曲した3次元的な輪形状を測定し、正確な溝カーブ値を得ることができる玉型形状測定装置を提供すること。
【解決手段】レンズ(玉型Lm)の周面に周方向に向けて形成されたバンド配設溝Lgに当接させるバンド配設溝用測定子36eと、前記バンド配設溝用測定子36eを前記レンズ(玉型Lm)の周方向に移動させる測定子駆動装置Dと、前記バンド配設溝用測定子36eの移動位置を検出する三次元位置検出装置(リニアスケール24,リニアスケール40及び駆動モータ6のモータドライブ回路Pd1等を含む構成)と、前記バンド配設溝用測定子36eの移動位置を前記バンド配設溝Lgに沿って移動させたときの前記三次元位置検出装置(リニアスケール24,リニアスケール40及び駆動モータ6のモータドライブ回路Pd1等を含む構成)からの検出信号に基づいてバンド配設溝形状を求める演算制御回路52を備えている。
(もっと読む)
形状測定装置
【課題】被測定面に段差部等の急激な形状変化のある光学素子の形状測定を高精度で行う。
【解決手段】3次元方向に移動する測定軸15は、移動ステージ21を介して、プローブ1を保持するハウジング10を支持する。被測定物24の段差部の近傍では、移動ステージ21をXYステージ28による測定軸15の走査方向と逆向きに駆動することで、プローブ1の走査速度を低減する。段差部を過ぎた後は、移動ステージ21を走査方向へ移動させて、測定軸15上の元の位置へもどして、測定を続行する。段差部におけるプローブ1の飛び跳ねを防ぎ、高精度な形状測定を可能にする。
(もっと読む)
形状測定装置
【課題】測定対象点に測定子を確実に接触させて被測定物の形状を測定することができる形状測定装置の提供。
【解決手段】三次元測定機1は、被測定物を測定するための球状の測定子を有するプローブ21と、プローブ21を保持するとともに、プローブ21を移動させる移動機構22と、移動機構22を制御するモーションコントローラ3とを備える。モーションコントローラ3は、測定子の中心位置と、測定子の半径と、測定子の振れ量とに基づいて、被測定物の表面と、測定子との接触点の位置を算出して取得する接触点取得部33と、接触点取得部33にて取得される接触点の位置に基づいて、移動機構22にてプローブ21を移動させるための位置指令値を算出する移動指令部31とを備える。
(もっと読む)
三次元測定装置及び該装置を用いた測定方法
【課題】測定精度を低下させることなく測定時間を短縮した三次元測定装置及び該測定装置を用いた測定方法を提供する。
【解決手段】本発明の三次元測定装置1は、被測定物を撮像する撮像手段と、撮像結果から被測定物に付着した異物3の有無を検知する異物検知手段と、被測定物に測定子161を接触させて測定する測定手段と、検知された異物3を低減・除去する異物除去手段と、を備えている。そして、異物3検知時には測定手段での測定前に異物除去手段で異物3を除去・低減するものである。これにより、異物3の検知時間を短縮できて、全体の測定時間を短縮することができ、且つ測定子161を用いて測定するため被測定物を正確に測定することができる。
(もっと読む)
形状測定装置、その校正方法、及び校正プログラム
【課題】高精度な校正が可能な形状測定装置、その校正方法、及び校正プログラムを提供する。
【解決手段】形状測定装置は、被測定物4を載置すると共にZ軸を中心として回転可能なテーブル5と、被測定物4に接触可能な測定子24と、測定子24を、互いに直交するX軸、Y軸及びZ軸のうち少なくともX軸及びZ軸方向に駆動する手段と、測定子24のY軸方向の位置を校正するための制御部41とを有する。制御部41は、テーブル5に載置された被測定物4の一部として含むY軸を中心として傾斜した傾斜平面若しくは傾斜円筒側面、又は中心軸がX軸方向にずれた偏心円筒側面を、回転させながら倣い測定することにより得られた測定値の最小値が得られたテーブル5の回転角度を最小検出角として求める手段と、最小検出角に基づいて測定子24のY軸方向の位置を調整する調整量を算出する手段とを含む。
(もっと読む)
表面性状測定装置、表面性状測定方法、及びプログラム
【課題】高精度に接触子の交換判定を実行可能な表面性状測定装置、表面性状測定方法、及びプログラムを提供する。
【解決手段】制御部51は、接触子24を基準ワーク4Aの表面に倣うように駆動すると共に接触子24の所定位置の軌跡を第1擬似測定点列P1iとして取得する。制御部51は、第1擬似測定点列P1i、及び基準ワーク4Aの表面を特定する設計面S0に基づき、接触子24の表面形状を示し且つ擬似空間上に配置される接触子モデルM1を算出する。制御部51は、被測定物4Aの表面41Aを特定する参照面S2に接触子モデルM1の表面が接し且つ測定時の接触子24と接触子モデルM1との姿勢を一致させるように接触子モデルM1を配置し、接触子モデルM1の基準位置Oを、第2擬似測定点列P2iとして算出する。制御部51は、第2擬似測定点列P2iに基づき、接触子24を交換すべきか否かを判定する。
(もっと読む)
玉型形状測定装置
【課題】測定子の測定モードを兼用させて、測定子の寿命を測定するとともに、作業者に交換を知らせるようにした玉型形状測定装置を提供すること。
【解決手段】演算制御回路52は、測定機構1dを作動制御して測定子(玉型用測定子36,レンズ枠用測定子37)を基準測定部に当接させたときに、位置検出装置(リニアスケール24)から出力される位置検出信号から測定子(玉型用測定子36,レンズ枠用測定子37)の移動位置を求めて、求めた移動位置の設定移動位置に対するズレ量を求め、ズレ量が所定範囲を超えているか否かにより測定子(玉型用測定子36,レンズ枠用測定子37)の測定子状態を検知するようになっている。
(もっと読む)
1 - 20 / 75
[ Back to top ]