
Fターム[2F062GG36]の内容
機械的手段の使用による測定装置 (14,257) | 測定機器 (1,459) | エンコーダ (142)
Fターム[2F062GG36]の下位に属するFターム
リニアエンコーダ (35)
ロータリーエンコーダ (66)
Fターム[2F062GG36]に分類される特許
1 - 20 / 41
関節式プローブヘッド
【課題】高速走査を精度と共に達成するため、測定システムの運動質量、動的誤差を最小にする関節式プローブヘッドを提供する。
【解決手段】CMMは、その直線駆動に関する回転誤差(例えばピッチ,ロールおよびヨー)のための誤差マップが作成される。走査ヘッドもまた、回転誤差のための誤差マップが作成される。測定データは、CMMおよび走査ヘッドの組み合わされた回転誤差に関して実時間に同期して誤差補正される。この同期補正ためCMMおよび走査ヘッドの誤差マッピングデータを使用する。
(もっと読む)
改良された関節式アーム

【課題】高い正確度、高い信頼性および耐久性、相当な
使い易さ、ならびに低コストを有する間接式アームを提供する。
【解決手段】関節式アームCMM1は、複数の伝達部材20と、少なくとも2つの伝達部材20を互いに接続する複数の関節部材30〜36と、遠端における座標取得部材50と、近端におけるベース10とを備える。関節部材30〜36の少なくとも2つは、少なくとも1つのエンコーダを備えることが可能であり、少なくとも2つのエンコーダは、ともに、単一のモノブロックハウジング内に収容されることが可能である。
(もっと読む)
計測装置
【課題】装置の高コスト化を抑えながら、被検面の形状を高精度に計測することができる技術を提供する。
【解決手段】被検物を保持する保持面を含む保持部と、被検面と被検面の形状を計測するための基準となる基準位置との間の距離を計測する距離計測部と、基準位置が被検面に沿うように距離計測部を駆動する駆動部と、駆動部によって駆動される距離計測部の基準位置を測定する位置測定部と、距離計測部によって計測された被検面と基準位置との間の距離と位置測定部によって測定された基準位置とに基づいて被検面の形状を算出する処理部と、を有し、位置測定部は、距離計測部に配置されて互いに異なる測定軸を有するレーザ干渉計と、レーザ干渉計のそれぞれからの光をそれぞれ反射する基準ミラーとを含み、レーザ干渉計の原点と基準ミラーとの間の距離を測定することで基準位置を測定し、基準ミラーの法線が保持面を含む面に交差するように配置される。
(もっと読む)
ワーク寸法測定装置
【課題】円形ワーク等を含む種々のワークの形状を短時間で簡易かつ正確に測定できるワーク寸法測定装置を提供する。
【解決手段】ワークWを挟んで両側に位置させられ、ワークWに向けて一定長の線状レーザ光Lを照射する一対のレーザ変位計4A,4Bと、これらレーザ変位計4A,4Bを互いに対向する方向で離間ないし接近方向へ移動させるスライダ機構2A,2Bと、ワークWに照射された線状レーザ光LがワークWの表面に線像を生じさせた際の移動距離に基づいてワークWの外形寸法を算出するパソコン6とを備える。ワークWは円形であり、その外周面に生じる線像は頂点を有する円弧状をなし、パソコン6は上記移動距離と頂点の位置に基づいてワークWの外径を算出する。
(もっと読む)
寸法測定装置および寸法測定装置を備えた荷搬送ロボット
【目的】寸法測定装置および荷搬送ロボットの提供。
【解決手段】荷搬送ロボットの本体16には、エリアセンサ26と左右一対のアーム17を設け、アーム17の先端付近には対向する内側に向けて突設された手先部30が傾動可能に設けられる。手先部30を荷の基端面W1の左右端面に当接可能な位置でアーム17を伸縮させることで、荷Wの側面に当接し傾動した状態の手先部30は荷の遠端面W2において傾動状態から復帰し、そのときのアーム17の伸長量から遠端面W2の位置を算出する。荷Wの奥行寸法は、エリアセンサ26により測定した本体16からの基端面W1の位置と、手先部30が傾動復帰したときの遠端面W2の位置から演算する。
(もっと読む)
表面性状測定機の直角度誤差算出方法および校正用治具
【課題】簡易でかつ安価な校正用治具を用いて直角度誤差を簡易にかつ高精度に算出可能な表面性状測定機の直角度誤差算出方法および校正用治具を提供する。
【解決手段】3つの基準球62A〜62Cを校正プレート61に直角に配置した校正用治具60を、テーブル16上に配置し、接触式検出器20によって3つの基準球の中心座標を求め(第1測定工程)たのち、これら中心座標を結ぶ2つの直線の交差角度θ1を算出する(第1角度算出工程)。次に、校正用治具を、同一面内で90度回転させてテーブル上に配置し、接触式検出器によって3つの基準球の中心座標を求め(第2測定工程)たのち、これら中心座標を結ぶ2つの直線の交差角度θ2を算出する(第2角度算出工程)。最後に、交差角度θ1,θ2とからY軸駆動機構17の移動方向とX軸駆動機構48の移動方向との直角度誤差を算出する(直角度誤差算出工程)。
(もっと読む)
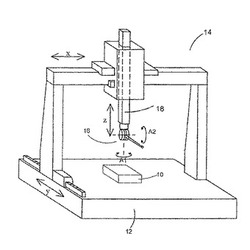
工作機械用測定方法
【課題】機械上の被加工物を工作機械の制御器に保存されたプログラムを利用して、高速に、正確に、且つ容易に被加工物を測定することを可能にする工作機械上の被加工物を測定する方法を提供する。
【解決手段】工作機械において、プログラム(12)は、被加工物Wの特徴を測定する走査プローブまたはアナログ・プローブPからデータを受け取る。このデータは、走査移動中に、前提の機械位置データと組み合わされる。このことは、実際に測定された位置データを得るために、サーボ・フィードバック・ループ(24)に割り込まなければならないことを防止する。前提の機械位置データは、走査移動を制御する部品プログラム(20)から引き出される。前提の機械位置の値と実際の値との間の誤差を補償するためにいくつかの方法が記載されている。
(もっと読む)
工作機械用測定方法
【課題】本発明は、工作機械上の被加工物を測定する方法及び装置を提供する。
【解決手段】工作機械において、プログラム(12)は、被加工物Wの特徴を測定する走査プローブまたはアナログ・プローブPからデータを受け取る。このデータは、走査移動中に、前提の機械位置データと組み合わされる。このことは、実際に測定された位置データを得るために、サーボ・フィードバック・ループ(24)に割り込まなければならないことを防止する。前提の機械位置データは、走査移動を制御する部品プログラム(20)から引き出される。また、いくつかの方法で前提の機械位置の値と実際の値との間の誤差を補償する。
(もっと読む)
測定システム
【課題】高速、かつ少ない振動およびエラーで部品表面の多数の座標ポイント取得できるようにする。
【解決手段】基準表面に対して可動サポートを位置決めするための1つ以上のアクチュエータとを含む測定システムであって、前記可動サポートが、サポートコネクタと、前記可動サポートと取り外し可能に接続された、前記基準表面に位置決めされたワークピースの表面の走査経路にある複数のポイントを測定するための走査プローブと、前記サポートコネクタと相互作用するように配置された、モジュラ回転取り付け具を前記可動サポートに接続させるための第1のコネクタ90、およびプローブコネクタと相互作用するように配置された、前記走査プローブを前記モジュラ回転取り付け具に接続させるための第2のコネクタ40を備えるモジュラ回転取り付け具と、前記第2のコネクタを前記第1のコネクタに対して回転させるためのアクチュエータ58とを有す。
(もっと読む)
座標測定機用取付けデバイス
可搬型の関節アーム座標測定機用取付けデバイスが、提供される。取付けデバイスは、開口が中を貫いている本体を含む。へりが、開口の片側に配置され、へりは、座標測定機の基部部分のフランジに係合するように大きさが決められる。開口の一部は、外部の取付け具に結合するように構成されたねじ山を含む。第1のアームが、本体に結合され、第1の位置と第2の位置の間を第1の方向に回転するように構成される。 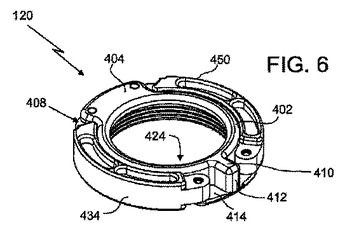 (もっと読む)
(もっと読む)
傾斜計を用いて関節アーム座標測定機の取り付けの安定性を評価するための方法
可搬型の関節アーム座標測定機が、基部と、反対側にある第1の端部および第2の端部を有する手動で位置付けることが可能な関節アーム部であって、複数の接続されたアームセグメントを含む、アーム部と、トランスデューサからの位置信号を受信する電子回路と、基部に結合された第1の傾斜計であって、基部の傾斜の角度に応じた第1の電気信号を生成するように構成された、第1の傾斜計と、第1の傾斜計の第1の読み取り値および第1の傾斜計の第2の読み取り値を記録するように構成された電気的システムであって、第1の読み取り値が、基部に加えられた第1の力および取り付け構造に加えられた第3の力のうちの少なくとも1つに応じたものであり、第2の読み取り値が、基部に加えられた第2の力および取り付け構造に加えられた第4の力のうちの少なくとも1つに応じたものである、電気的システムとを含む。 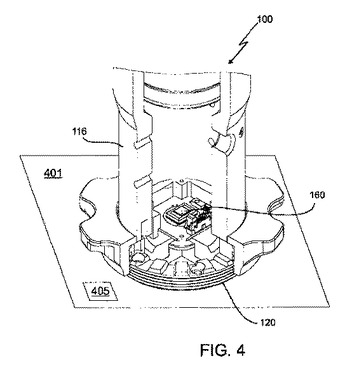 (もっと読む)
(もっと読む)
細長いワークピースの内弧または外弧の部分の長さを測定する方法
【課題】曲げ動作中の細長いワークピースにおける曲げ部分の長さを正確に測定する方法を提供する。
【解決手段】前進方向に沿って曲げ機械において移動する細長いワークピースTの外弧または内弧の部分の長さを測定する方法であって、細長いワークピースTが、複数の断面であってそれぞれが細長いワークピースTが曲げられているときに中立軸によって伸張部分及び収縮部分の双方に分けられる複数の断面と、少なくとも中立的なすなわち曲げられていない断面であって細長いワークピースTの湾曲がワークピースTの前進方向に沿って中立的な断面を越えて始まる中立的な断面とを有し、長さの測定が測定器具4によって実行され、測定器具4が測定中に測定器具4が中立的な断面の近傍で細長いワークピースTの外弧または内弧のいずれかの点と係合するように位置付けられている。
(もっと読む)
車輪位置計測装置
【課題】車輪の位置変化量を精度よく求めることができる車輪位置計測装置を提供する。
【解決手段】車輪位置計測装置10は、ホイールトルク計16と固定部材18とを連結する連結部材20を備える。連結部材20は、ホイールトルク計16に支持されるポール26と、固定部材18に支持され、ポール26にスライド自在に係合されたスライダ28と、ポール26上のスライダ28の変位量やポール26の姿勢の変化量を計測するエンコーダ30〜38とを備え、エンコーダ30〜38の計測結果が車輪12の動きに換算される。
(もっと読む)
デジタル内空変位計
【課題】従来測定が困難であった場所でも比較的容易に測定可能なデジタル内空変位計を提供する。
【解決手段】坑道等の内部空間の長さ測定を行うデジタル内空変位計であって、比較的小形の本体部2と、本体部に接続された更に小形のセンサユニット4と、センサユニットからの測定データを表示するデジタル表示器6とを備え、本体部内部に比較的大きな径部17wと比較的小さな径部17nをもつ回転軸17と、複数個の一定の引っ張り張力を発生する複数個の張力発生器19−1〜19−4とを有し、回転軸大径部にはN極及びS極が所定の周期で交互に着磁された磁気テープ8が巻かれており、回転軸小径部には各々の張力発生器からの帯状スプリングが巻かれており、長さ測定時には複数個の張力発生器からの一定の引っ張りトルクが前記回転軸の比較的小さな径部に加わって磁気テープは一定の張力で引っ張られる。
(もっと読む)
蛇行量検出装置及び画像形成装置
【課題】比較的安価で、且つ調整及び校正が不要な蛇行量検出装置を提供する。
【解決手段】回走する無端ベルトの蛇行量を検出する蛇行量検出装置であって、前記無端ベルトのベルト幅方向の移動に応じて回転するスリット円板を有し、該スリット円板の回転角度を示すデジタル信号を出力するアブソリュートエンコーダと、前記アブソリュートエンコーダから出力されるデジタル信号に基づいて前記無端ベルトのベルト幅方向の移動量を前記蛇行量として演算する演算手段とを備える。
(もっと読む)
三次元測定機
【課題】測定条件を変更した場合であってもプローブの移動量を適切に補正することができる三次元測定機の提供。
【解決手段】三次元測定機は、一定の範囲内で移動可能に構成される測定子を有するプローブと、プローブを移動させる移動機構と、移動機構を制御する制御装置とを備える。制御装置は、移動機構の移動量、及びプローブの移動量に基づいて測定子の位置を算出する測定値算出部53を備える。測定値算出部53は、被測定物を測定するときの測定条件に基づいて、プローブの移動量を補正するための補正パラメータを算出する補正パラメータ算出部531と、補正パラメータに基づいて、プローブの移動量を補正する補正部532と、移動機構の移動量と、補正部532にて補正されたプローブの移動量とを合成することで測定子の位置を算出する移動量合成部533とを備える。
(もっと読む)
スポット溶接装置の電極消耗量計測方法及び電極消耗量計測装置
【課題】電極研磨加工の品質を確保しながらも、研磨作業と電極消耗量検出を同期処理可能にして溶接ラインの稼働ロスを低減可能にし、ロッド側とアーム側の両電極の消耗量検出を精度よく行える技術を提供する。
【解決手段】ドレッサー4を稼働状態として、可動側電極13をドレス刃21に押圧して整形研磨し、研磨完了時に可動側電極13の第1ドレス位置情報を取得し、固定側電極12をドレス刃21に押圧して整形研磨し、研磨完了時に固定側電極12の第2ドレス位置情報を取得し、予め取得した第1基準ドレス位置情報と今回取得した第1ドレス位置情報との差から可動側電極13の消耗量Xを算出し、予め取得した第2基準ドレス位置情報と今回取得した第2ドレス位置情報との差から固定側電極12の消耗量Yを算出する。
(もっと読む)
モノレール桁の測定装置
【課題】跨座形モノレールの建設中の各部の位置の測定に適したモノレール桁の測定装置を提供する。
【解決手段】跨座形のモノレール軌道桁の走行面に載置されるべースプレートと、前記軌道桁を横切るように前記べースプレートに取付けられた上部辺と、前記上部辺の両端から下方に伸びる脚部と、前記脚部に取付けられモノレール軌道桁の被測定位置に移動して計測するターゲット冶具を備え、前記上部辺は、固定上部辺とこの固定上部辺に沿って横方向に移動する可動上部辺からなり、前記脚部の少なくとも一方は、固定脚部とこの固定脚部に沿って縦方向に移動する可動脚部からなり、上記可動上部辺と可動脚部の移動距離をそれぞれ計測するエンコーダを備え、上記各エンコーダの計測値に基いて上記ターゲット冶具の位置を検知することを特徴とする。
(もっと読む)
ロープ溝形状測定装置およびロープ溝形状測定方法
【課題】ロープ溝の摩耗量の測定では、ロープ溝の全周に渡る測定を実施せず、ロープ溝のある部分の代表値の測定のみであり、ロープ溝に偏摩耗などがある場合は正確に検出できない。
【解決手段】ロープ溝21の特定部位の位置を測定する位置センサ4と、この位置センサを溝車2の中心軸方向に沿って移動する軸方向移動手段6と、溝車の回転角度を検出する回転角検出手段9と、位置センサの検出値(位置データ)と軸方向移動手段の駆動量(駆動データ)と回転角検出手段の検出値(回転角度データ)とからロープ溝の断面形状を算出する溝形状演算手段10とを備え、溝車のロープ溝の全周に渡る摩耗状態を測定できるようにした。
(もっと読む)
角度検出装置
【課題】構成が比較的簡素で、正確に回転角度を検出し得る角度検出装置を提供する。
【解決手段】基台1と基台1上に回転可能に支持されたベース106と間の回転角度を検出し、ベルトのベルト固定装置に対する角度を検出する。基台1と基台1上に回転可能に支持されたベース106と間の回転角度を検出する。ベース106上に固定されたカム11と、カム11と接触してその姿勢もしくは位置が変位する従動子12と、従動子12の変位量を検出するセンサ13とを有する。ベース106の回転量に応じて変化する従動子12の変位量に基づき、ベース106の回転軸111のまわりの回転角度を検出する。
(もっと読む)
1 - 20 / 41
[ Back to top ]