
Fターム[2F062GG38]の内容
機械的手段の使用による測定装置 (14,257) | 測定機器 (1,459) | エンコーダ (142) | ロータリーエンコーダ (66)
Fターム[2F062GG38]に分類される特許
1 - 20 / 66
位置計測装置及び位置計測システム
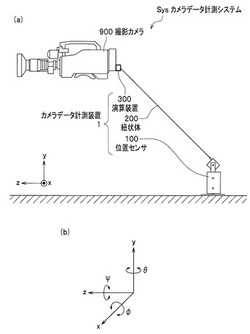
【課題】本発明は、機動性に優れ、平坦でない計測基準面でも、高い精度で位置を素早く計測できる位置計測装置を提供する
【解決手段】カメラデータ計測装置1は、紐状体200の紐長変化量と紐状体の紐方向とを計測する位置センサ100と、両端が位置センサ100と撮影カメラ900とに接続された紐状体200と、紐長変化量及び紐方向に基づいて、撮影カメラ900のカメラデータを計測する演算装置300とを備え、演算装置300が、紐長初期値L0と位置センサ100で計測された紐長変化量ΔLとの和を紐方向での紐全長Lとして求め、求めた紐方向での紐全長Lを3次元方向成分に分解することで、撮影カメラ900の位置を示す3次元座標を算出する。
(もっと読む)
多関節型座標測定装置

【課題】多関節型測定アームに測定誤差要因となるストレスがかからない測定姿勢を維持させる。
【解決手段】測定アームの各関節の角度に基づき、1)測定アームの第1リンクと第2リンクがなす角度が所定値を超えて180°に近づいた、2)手首関節からアーム支点への距離が所定値を超えて遠くなった、3)バランサーにより発生される力に基づいて定められる所定範囲を超えて第2リンクが曲げられた、のいずれかの条件が成立した場合、ユーザへの警告を行ない、専用プロセッサからの空間座標値の出力を中止する。
(もっと読む)
改良された関節式アーム
【課題】高い正確度、高い信頼性および耐久性、相当な
使い易さ、ならびに低コストを有する間接式アームを提供する。
【解決手段】関節式アームCMM1は、複数の伝達部材20と、少なくとも2つの伝達部材20を互いに接続する複数の関節部材30〜36と、遠端における座標取得部材50と、近端におけるベース10とを備える。関節部材30〜36の少なくとも2つは、少なくとも1つのエンコーダを備えることが可能であり、少なくとも2つのエンコーダは、ともに、単一のモノブロックハウジング内に収容されることが可能である。
(もっと読む)
内周面測定装置
【課題】エンジンのシリンダブロック等の貫通穴の内周面を簡便に測定する内周面測定装置を提供する。
【解決手段】内周面測定装置1は、測定スピンドル29と第1支持部5と第2支持部17とガイドブロック48とを有する。第1支持部5及び第2支持部17はシリンダブロック2の両端面に着脱自在に取付られ、シリンダブロック2の貫通穴3に挿通された、測定スピンドル29を回転自在に支持する。測定スピンドル29は、円筒形状であり、内面32を切欠いて回転軸30の方向に略平行にのびるスリット33を有する。測定スピンドル29の内側に配置されるガイドブロック48には、貫通穴3の内周面4を計測する変位センサ51が固定される。ガイドブロック48は、スリット33に係合し回転軸30に沿って測定スピンドル29内を手動でスライド移動する。任意の測位位置において測定スピンドル29を手動で回転させて、内周面4の形状測定を行う。
(もっと読む)
表面粗さ測定装置
【課題】本発明は、複数枚のウエハの表面粗さの測定を連続で自動的に行うことができ、測定効率を向上させることができる表面粗さ測定装置を提供することを目的とする。
【解決手段】複数のウエハ70を載置できる回転駆動可能なステージ10と、
該ステージ上で前記複数のウエハを同心円状に位置決め固定する位置決め手段50と、
上下方向及び水平方向に直線的に移動可能に支持された接触子21を、所定の測定位置にあるウエハの表面に接触させて水平方向に直線移動させることにより、該ウエハの表面粗さを測定する表面粗さ測定手段20と、
測定対象となる測定対象ウエハを前記所定の測定位置に前記ステージを回転させて移動させ、前記表面粗さ測定手段により該測定対象ウエハの表面粗さを測定する一連の動作を前記複数のウエハに対して順次行うように前記ステージ及び前記表面粗さ測定手段を制御する制御手段40と、を有することを特徴とする。
(もっと読む)
真円度測定装置及びその心ずれ量補正方法
【課題】測定物の母線と検出点とのずれ量である心ずれ量を算出して補正することにより、基準となる測定物の直径値とは異なる直径値を有する測定物であっても正確な直径値を算出する。
【解決手段】測定物の中心と回転の中心を一致させて、測定物を検出器に対して相対的に回転させ、測定物の真円度を測定する真円度測定装置において、基準測定物に対する前記検出器の検出方向と直交する方向に前記基準測定物を移動させる手段と、前記基準測定物を基準位置から前記検出器の検出方向と直交する方向に移動させたときの各位置における検出値の変化量に基づいて、前記基準測定物の母線と前記検出器の前記基準測定物に対する検出点とのずれ量である心ずれ量を算出する手段と、前記算出した心ずれ量に基づいて、任意の測定物の測定値を補正する手段とを備えたことを特徴とする。
(もっと読む)
ボールねじの測定装置および測定方法
【課題】ボールねじナットの内周面の溝形状の検査を容易且つ短時間で行う。
【解決手段】ボールねじナットを回転テーブル22により回転自在に支持するとともに、その回転角度をロータリエンコーダ23で測定し、測定子3をXYZテーブル12により、XYZ方向に移動自在に支持するとともに、測定子3がボールねじナットの方向に移動するX軸方向の変位をリニアゲージ13により測定し、測定子3が上下に移動するZ軸方向の変位をダイヤルゲージ14により測定する。これらセンサの検出信号をもとに、ボールねじナットにおける測定子3の位置座標を演算し、位置座標をもとにボールねじナットの各部の測定を行う。
(もっと読む)
プローブヘッド
【課題】ロータリーカップリングによって下ハウジングを上ハウジングに対して連続的に回転させることを可能とするプローブヘッドを提供する。
【解決手段】測定プローブ2を支持する連結手首を有し、プローブを2つの回転軸A、Bのまわりに回転させるプローブヘッド6であり、ヘッドは装置と接続するための上ハウジング10と回転可能に接続し、第1モータMBによって上ハウジングに関して第1軸Bまわりに連続的に回転することができる、下ハウジング12と測定プローブに回転可能に接続し、第2モータMAによって下ハウジングに関して前記第1軸を横切る第2軸Aまわりに回転することができるキャリジ14と、第1軸まわりの連続的な回転を可能として少なくとも第2モータのための電力経路aを提供するロータリーカップリング90と、を具えた。
(もっと読む)
産業機械
【課題】 移動機構の位置に基づく信号を出力するリニアエンコーダの原点位置を検出する動作を不要にでき、短時間で測定を開始できる産業機械を提供する。
【解決手段】 三次元測定機1は、所定の軸方向へ制御対象物を移動させるスピンドル2と、スピンドル2の位置を制御することにより制御対象物の位置を制御する制御装置3とを備えるものであって、スピンドル2の絶対位置を出力するアブソリュート型のリニアエンコーダ11を備える。このため、三次元測定機1による測定を短時間で開始できる。
(もっと読む)
産業機械および産業機械の制御方法
【課題】 短時間で容易かつ確実に原点位置の検出ができる産業機械および産業機械の制御方法を提供する。
【解決手段】 三次元測定機1は、所定の軸方向へ制御対象物を移動させるスピンドル2と、スピンドル2を移動させる駆動力を発生する駆動モータ3と、スピンドル2の位置を制御するとともに駆動モータ3の回転速度を制御する制御装置4とを備えるものであって、スピンドル2の位置に基づく信号を検出するインクリメンタル型のリニアエンコーダ11と、駆動モータ3の絶対角度に基づく信号を検出するアブソリュート型のロータリーエンコーダ12とを備える。
(もっと読む)
産業機械
【課題】使用する環境の温度変化や、経時変化などの影響があっても適切に空間精度補正をすることができる産業機械の提供。
【解決手段】産業機械としての三次元測定機1は、ガイド部212と、コラム221とで構成され、Y軸方向に沿って移動する移動機構と、コラム221の角度を検出する2軸角度計32と、移動機構を制御する制御装置4とを備える。制御装置4は、角度誤差取得部42と、パラメータ生成部43と、補正部44とを備える。角度誤差取得部42は、コラム221を移動させたときに2軸角度計32にて検出される角度に基づいて、コラム221の位置に対するコラム221の角度誤差を取得する。パラメータ生成部43は、角度誤差取得部42にて取得されるコラム221の角度誤差をコラム221の位置で積分することで真直度補正パラメータを生成する。補正部44は、パラメータ生成部43にて生成される真直度補正パラメータに基づいて、移動機構の運動誤差を補正する。
(もっと読む)
測定システム
【課題】高速で、振動と測定誤差の少ない座標測定システムを提供する。
【解決手段】座標測定システムの可動サポートに着脱可能に接続されるコネクタを備えるアナログ走査プローブ120であり、走査プローブは、測定軸63に従って当該走査プローブに回動可能に接続される針部28の先端の接触部30と、前記測定軸63についての前記接触部30の傾き角の測定を行う位置エンコーダと、を含み、前記コネクタと前記測定軸63との間に走査プローブ又はプローブの一部を傾けてプローブの走査を可能とする1つの関節64が備えられる。
(もっと読む)
形状測定機の公差検出方法及び装置
【課題】分割して測定して求めるしかなかった、連続して測定するのが困難な形状を有する測定対象の形状の公差を、1回の計算で容易に検出可能とする。
【解決手段】連続して測定するのが困難な形状を有する測定対象の形状の公差を検出する際に、設定された複数の部分測定データを抽出し、先頭の部分測定データから基準位置を設定し、該基準位置を用いて、各部分測定データを一つのデータに結合し、該結合したデータを用いて公差を計算する。
(もっと読む)
座標位置測定装置による測定エラーの修正
座標位置測定装置のためのエラー修正方法を開示する。この方法は、(i)各々が第一の物体の表面上のある位置を表す1つまたは複数の第一のデータ値を含む第一のデータセットを取得するステップと、(ii)各々が第一の物体の表面上のある位置を表す1つまたは複数の第二のデータ値を含む第二のデータセットを取得するステップと、(iii)各々が、第一のデータセットにより説明される表面と第二のデータセットにより説明される表面の間の位置差を表す1つまたは複数のエラー値を含むエラーマップを計算するステップと、を含む。第一の物体の面法線が第一のデータ値の各々によって表される各位置において既知であり、ステップ(iii)は、実質的に既知の面法線の方向の位置差を判断することによって各エラー値を計算するステップを含む。加工または測定作業は、第一の物体または第一の物体と名目上同一の物体について実行され、その表面上の位置がステップ(iii)で計算されたエラーマップを使って修正される。  (もっと読む)
(もっと読む)
組み込みアーム歪みセンサ
可搬型の関節アーム座標測定機(AACMM)が、手動で位置付けることが可能な関節アーム部と、第1の端部に装着された測定デバイスと、AACMMの構造的コンポーネントであって、軸方向を有する、構造的コンポーネントと、構造的コンポーネントに結合された、それぞれが受感軸を有する少なくとも3つの歪みゲージセンサであって、各歪みゲージセンサの受感軸が、軸方向に対してほぼ平行に向きを決められ、各歪みゲージセンサが、軸方向に垂直な横断面によってほぼ横切られ、アナログ歪みゲージ信号を生成し、歪みゲージセンサが、構造的コンポーネントと横断面の両方の上に存在する任意の点の曲げ歪みを判定するのに十分なデータを提供するように配置される、歪みゲージセンサと、位置信号を受信し、測定デバイスの位置に対応するデータを提供する電子回路とを含む。  (もっと読む)
(もっと読む)
座標測定機用ディスプレイ
基部を有する可搬型の関節アーム座標測定機が、提供される。カバーが、閉じた位置と開いた位置の間を動くように基部に回転可能なように結合される。ディスプレイが、カバー内に配置される。ディスプレイは、筐体の片側に配置された、タッチスクリーン面などのスクリーン面を含む。スクリーン面は、閉じた位置において基部に近接し、開いた位置において基部に対して斜めに配置される。  (もっと読む)
(もっと読む)
照明付きプローブ端を有する座標測定機および動作方法
可搬型の関節アーム座標測定機(AACMM)が、提供される。AACMM(100)は、反対側にある第1の端部および第2の端部を有する手動で位置付けることが可能な関節アーム(104)を含む。アーム(104)は、複数の接続されたアームセグメント(106、108)を含み、アームセグメント(106、108)のそれぞれは、位置信号を生成するための少なくとも1つの位置トランスデューサを含む。測定デバイス(118)が、AACMM(100)の第1の端部に装着される。トランスデューサからの位置信号を受信するための、および測定デバイス(118)の位置に対応するデータを提供するための電子回路(210)が、設けられる。光源(402)が、アーム(104)に結合され、測定デバイス(118)の近くに光を放射するように配置される。  (もっと読む)
(もっと読む)
多機能座標測定機
可搬型の関節アーム座標測定機(AACMM)が、反対側にある第1の端部および第2の端部を有する手動で位置付けることが可能なアーム部であって、接続されたアームセグメントを含み、各アームセグメントが、位置信号を生成するための少なくとも1つの位置トランスデューサを含む、アーム部と、AACMMの第1の端部に装着された測定デバイスと、トランスデューサからの位置信号を受信し、測定デバイスの位置に対応するデータを提供する電子回路とを含む。可搬型のAACMMを実装することが、データが送信される送信経路を判定することによって、データが受信される送信元デバイスを特定するステップであって、送信元デバイスが、AACMMの第1の端部に取外し可能なように装着される、ステップと、送信元デバイスの特定情報に基づいてデータのデータタイプを判定するステップと、データタイプに応じてデータに対してアクションを実行するステップと、アクションを実行した結果を送信先デバイスに出力するステップとを含む。  (もっと読む)
(もっと読む)
取り外し可能なアクセサリを有する座標測定機
可搬型の関節アーム座標測定機(100)が、提供される。座標測定機(100)は、アーム部(104)とともに基部(116)を含む。プローブ端(401)が、基部(116)から遠位にある、アーム部(104)の端部に結合される。プローブ端(401)は、締め具(438)および第1のコネクタ(428)を有する。デバイス(400)が、締め具(438)によってプローブ端(401)に取り外し可能なように結合され、デバイス(400)は、締め具(438)がデバイス(400)をプローブ端(401)に結合するときに第1のコネクタ(428)に係合するように構成された第2のコネクタ(429)を有する。  (もっと読む)
(もっと読む)
座標測定デバイスのためのカウンタバランス
可搬型の関節アーム座標測定デバイスが、提供される。座標測定デバイスは、基部と、少なくとも1つのアームセグメントを有する関節アーム部とを含む。付勢部材が、基部に第1の端部で結合され、関節アーム部に第2の端部で結合される。付勢部材の第1の端部は、第1の位置と第2の位置の間を動くことができる。アジャスタが、基部と付勢部材の間に結合される。アジャスタは、付勢部材の第1の端部を第1の位置から第2の位置に動かすために結合される。  (もっと読む)
(もっと読む)
1 - 20 / 66
[ Back to top ]