
Fターム[2F062GG49]の内容
機械的手段の使用による測定装置 (14,257) | 測定機器 (1,459) | 歯車 (28)
Fターム[2F062GG49]の下位に属するFターム
ラック・アンド・ピニオン (10)
Fターム[2F062GG49]に分類される特許
1 - 18 / 18
座標測定デバイスのためのカウンタバランス
可搬型の関節アーム座標測定デバイスが、提供される。座標測定デバイスは、基部と、少なくとも1つのアームセグメントを有する関節アーム部とを含む。付勢部材が、基部に第1の端部で結合され、関節アーム部に第2の端部で結合される。付勢部材の第1の端部は、第1の位置と第2の位置の間を動くことができる。アジャスタが、基部と付勢部材の間に結合される。アジャスタは、付勢部材の第1の端部を第1の位置から第2の位置に動かすために結合される。  (もっと読む)
(もっと読む)
被測定物の高さ調整装置及びこれを備えた表面形状測定装置

【課題】回転自在の測定用テーブル上において、良好な測定精度を維持しつつ、測定位置における被測定物の高さを簡易な操作により調整可能とする。
【解決手段】ワークWの高さを調整する高さ調整装置10が、測定用テーブル2上に昇降自在に設けられた昇降体82と、昇降体を支持するとともに、測定用テーブル表面に対して傾斜した傾斜面81aを有し、当該傾斜面の昇降体に対する相対移動により昇降体を昇降させるテーパブロックとを備え、昇降体は、前記被測定物を支持する球状部材102と、傾斜面に回転自在に当接するローラ103とを有する構成とする。
(もっと読む)
玉型形状測定装置

【課題】ハイカーブフレーム枠のフレーム形状を正常に測定できるとともに、フレームPDも正確に測定することのできる玉型形状測定装置を提供する。
【解決手段】眼鏡のフレーム枠を保持するスライド枠3,3を有する保持手段と、フレーム枠のヤゲン溝に当接させる測定子37,38とを備え、スライド枠3,3及び測定子37,38を相対的に移動させることによりフレーム枠の形状を測定する玉型形状測定装置であって、測定装置本体1から離れた位置にある仮想軸402を中心にして、前記保持手段を矢印D方向にスイングさせるための保持手段スイング機構を備えた。
(もっと読む)
絶対角検出方法及び絶対角検出装置
【課題】回転角度センサの誤差が絶対角に反映されにくい絶対角検出方法及び絶対角検出装置を提供する。
【解決手段】第1比例定数と、回転角θcaと回転角θcbとの差とを用いて演算し仮の絶対角KΦを求め、回転角θcaと第2比例定数とを用いて演算しメイン歯車2のシャフト回転角φacを求め、仮の絶対角KΦから回転角度センサ6におけるセンサ周期Θの繰り返し回数Ncaを求め、シャフト回転角φac及びセンサ周期Θとセンサ周期Θの繰り返し回数Ncaとから絶対角Φを求める。
(もっと読む)
伸縮測定装置
【課題】光学式の回転センサを用いた伸縮測定装置を提供する。
【解決手段】回転軸と一定の距離にある第1円周を表面の一部とし、回転軸の周りに回転する第1回転体と、第1円周に沿って、かつ、第1回転体の表面にN極またはS極を向けて配置された複数の第1磁石と、第1円周と対向するように第1回転体の外部に配置され、磁界の状態を検出する第1近接センサ、第2近接センサを備える回転センサと、対象物に取り付けるワイヤーと、ワイヤーが巻きつけられるワイヤー巻取り部と、ワイヤーの張力を一定に保つように、ワイヤー巻取り部を回転させ、ワイヤーの繰り出しまたは巻取りを行う張力保持部と、基準物とワイヤー巻取り部とを固定する固定部と、を備え、張力保持部のワイヤーの繰り出しまたは巻取りの量に応じて、第1回転体と第2回転体が回転する伸縮測定装置。
(もっと読む)
ギャップ測定器
【課題】持ち運び容易な軽量であって、簡単かつ高精度にドクタギャップを測定できるギャップ測定器を提案する。
【解決手段】円柱状の部材22とそれに近接する部材23との間隔を測定するために、下端に円柱状部材22に当接する固定測定子が形成されるとともに、ギャップの測定方向と略垂直な測定基準面Aが形成された固定体2と、下端に円柱状部材22に近接する部材23に当接する可動測定子が形成されるとともに、ギャップの測定方向と略垂直な測定基準面Bが形成された可動体3と、測定基準面A,Bが接離自在であるとともに、固定体2に対して可動体3を互いに平行を保ったままで移動可能に保持する摺動ピン4,5等からなる摺動機構と、固定体2に保持されて、固定体2側の測定基準面Aに対する可動体3側の測定基準面Bの離間量を測定するマイクロメータヘッド8を備える。
(もっと読む)
絶対位置測定装置
【課題】小型化を容易に図れ、製造上の負担を軽減でき、スピンドルの絶対位置を測定可能な絶対位置測定装置を提供すること。
【解決手段】スピンドル3の回転量を第1の周期で変化する位相信号として検出する第1のロータリーエンコーダと、スピンドル3の回転量を第2の周期で変化する位相信号として検出する第2のロータリーエンコーダとを備える。第1のロータリーエンコーダの第1のロータ42の回転は、第1の回転円筒43の外周に形成された第1の歯車48と、第2の回転円筒52の外周に形成された第2の歯車55とに噛合する中継歯車53によって、第2のロータ51に伝達される。従って、二つの異なる周期の位相信号に基づいてスピンドルの絶対位置を算出できる。また、従来のようなスピンドルの螺旋状のキー溝を設ける必要がなく、小型化を容易に図れる。また、製造上の負担を軽減させることができる。
(もっと読む)
回転角度検出装置
【課題】回りに磁石を使用した装置があったとしても、磁界の影響を受けない回転角度検出装置を提供する。
【解決手段】回転角度検出装置は、加速度センサ11を設けた第一基板7と、ステアリングシャフト30の回転運動を第一基板7の揺動運動に変換する変換機構と、変換機構を通じて揺動運動する第一基板7の傾斜に伴う加速度センサ11の出力信号を処理し、ステアリングシャフト30の回転角度を求める制御装置13を備える。
(もっと読む)
回転検出器
【課題】ロータと多重巻ユニットの間の歯車のギヤ結合における定義されない遊びが、最低限に抑えられる回転検出器を得る。
【解決手段】ハウジングと、ハウジングの中へ突入する測定されるべき駆動軸と回転不能に結合され、その角度位置が1回転の間に測定されるロータと、ハウジングに支承され、ロータが回転した回数を測定する多重巻ユニットとを有している。多重巻ユニットは、ロータと結合された駆動平歯車10および多重巻ユニットの被駆動平歯車12を有する歯車伝動装置を介して、ロータと連結されている。一方の平歯車10では、2つ目ごとの歯16の頭部がピッチ円まで短縮されている。他方の前記平歯車12では、2つ目ごとの歯溝18の底面がピッチ円まで充填されている。平歯車10、12は斜めに歯が切られており、はすば歯形の傾斜角は常に少なくとも1つの歯16が係合するように設定されている。
(もっと読む)
胴回り測定バンド
【課題】 男女を問わず、肥満に悩む多くの人が、胴回りの寸法を気にしている。しかし、いちいち巻尺で測るのは面倒である。
【解決手段】ズボンやスカート着用時のバンドが、胴回りの寸法を計測して、その数値をバンドのバックルに表示することにより、どこにいても、その時の胴回りの寸法がわかるようにした。
(もっと読む)
真円度測定装置及び真円度測定方法
【課題】ワークと回転台の中心を合わせる作業が全く不要で、正確かつ容易に円板状ワークの真円度を測定できるようにする。
【解決手段】テーブル上に載置したワークを挟んで、ヘッド先端がそれぞれワークの反対側の周縁に接するように2個の検出器を対向して設け、ワーク周縁に接するように1対の固定ローラと移動ローラを、各対において一方のローラと他方のローラが2個の検出器のヘッド軸線Aに対して線対称の位置になるように設け、少なくとも1個のローラを駆動手段で回転させる。1対の可動ローラはワーク周縁に接する方向に付勢され、軸線Aに対して常に線対称となるように移動可能とする。ワークをその周縁に接する4個のローラで保持して回転させるため、高精度の回転装置を必要とせず、ワークを中心合わせをしてテーブルに固定する作業が全く必要ない。
(もっと読む)
位置決めシステム
【課題】可動型ポジショナーのための位置決めシステムとして、機械的に複雑でなくてもポジショナーに高い位置決め精度を可能とし、フレキシブルにさまざまな用途に適するようなものを得ること。
【解決手段】
ポジショナーを位置決めする位置決めシステムが、ポジショナー(10)を駆動するモーター(18)と、測定装置とを備え、この測定装置は、モーター(18)を制御するためポジショナーの調整トラベルを直接測定する。このため牽引ワイヤ(32)がポジショナーと結合され、ドラム(36)に巻き取られる。ポジショナーの調整トラベルを測定するため、シャフトエンコーダー(42)を用いて、ドラム(36)の回転を測定する。
(もっと読む)
炉内搬送物位置検出装置
【課題】 リミットスイッチを確実に作動させる炉内搬送物位置検出装置を提供する。
【解決手段】 加熱炉2にてコンベア10によって搬送されるコンテナ(搬送物)4の位置を検出する炉内搬送物位置検出装置20において、加熱炉2のケーシング3を貫通し回転可能に支持されるシャフト21と、加熱炉2内を通過するコンテナ4のドグ19に係合してこのシャフト21を回転駆動する回転フォロワ22と、加熱炉2の外側でシャフト21の回転をリミットスイッチ43の作動に変換するシャフト回転位置検出機構40とを備える。
(もっと読む)
付着された連結手段の動き程度を測定する装置
付着された連結手段の引っ張られた程度、方向及び長さを測定できる装置を開示する。一端は装置の内部に連結されており、他端は前記装置の一側面を介して外部に位置する連結手段、連結手段の他端が装置外部に引っ張り出されるときに発生する微小変化を感知して連結手段に加えられた張力を検出する張力検出部、張力により連結手段が、張力方向に実質的に直交する平面空間で、上下あるいは左右に移動する程度を感知して、連結手段が引っ張られる方向を測定する方向検出部、及び張力により引っ張られた連結手段の装置外部への引出し長さを測定する長さ検出部を備え、ケーブルなどの連結手段が引っ張られた場合に、そのケーブルに連結された装置が、引っ張られた状態についての情報を検出する。したがって、該発明の装置が付着されたロボット子犬と、本発明のケーブルを手に取って散歩を行った場合に、そのケーブルの保持状態についての情報を提供し、ユーザの意向についてロボット子犬に知らせ、その結果、ロボット子犬が、ユーザの意向にしたがってユーザについてくるようになる。これにより、本装置がユーザの意向にいての情報をこの装置に提供するので、ロボット子犬などの自動的に移動できる装置は、本装置の使用によって、より便利に使用することができる。 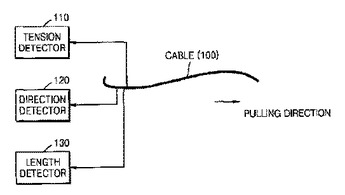 (もっと読む)
(もっと読む)
波付き管計尺装置及び計尺切断装置
【課題】
計尺精度が高く、しかも計尺ロールを交換することなく波形ピッチの異なる各種の波付き管の計尺を行える波付き管計尺装置を提供する。
【解決手段】
テーパー状外周面に、その外周面を周方向に等分するように多数の突条18を形成してなる計尺ロール12と、この計尺ロール12と相対して計尺ロール12との間に波付き管10を挟み付ける受けロール14と、計尺ロール12と受けロール14の間を通過する波付き管10を、当該波付き管10の波形の谷部と計尺ロール12の突条とが噛み合う位置を通過するように案内するガイドロール16とを備える。計尺する波付き管10の外径、波形ピッチが変更になるときは、計尺ロール12の上下位置、ガイドロール16の間隔、ガイドロール16の左右方向の位置を調整する。
(もっと読む)
弁体の支持ランド測定装置
測定器は、弁胴の内側ハブランド106と外側ランド104との相対位置を測定するように設計されている。位置決め面212は、内側ハブランド106に対して測定を行うように内側ハブランド106と係合する。プローブは、外側ランド104と係合するように設計されている。弁胴を回転させることによって、外側ランド104の全周を内側ハブランド106に対して測定することができる。 (もっと読む)
位置決め用ギヤボックスセンサーアセンブリ
本発明は、位置決めに使用されるギヤボックス内のセンサーアセンブリに関する。センサーアセンブリは相対するギヤボックスハウジング18に固定されたセンサー20を備え、ギヤボックスハウジング18とギヤボックス14、16の出力軸26の間の角度が出力軸26に固定され且つセンサー20に接続された軸28を使用して計測され、それによってギヤボックス14、16に遊びを包含するギヤボックス14、16で角度を計測するセンサーアセンブリが実現され、遊びを有するギヤボックス14、16が正確な角度を有する位置決めに活用し得るのと同時に高い精度を確保する。
(もっと読む)
プローブ用の測定ヘッド
【課題】 触針の軌跡が、固定および固定解除の動作の際においてでさえも、完全に制御される測定ヘッドとを提供する。
【解決手段】支持要素(30)と、該支持要素(30)に接続され、支持要素(30)に対して第一軸(B)を中心に回転可能な第一可動要素(40)と、固定状態および固定解除状態にするためのアクチュエータとを有し、該アクチュエータが、固定解除状態にあるときに、第一可動要素(40)を支持要素(30)から離隔させ、第一軸(B)を中心に回転可能にするために第一可動要素(40)に固定解除力をかけるように構成され、固定状態にあるときに、支持要素(30)に対して第一可動要素(40)を再び締め付け、第一軸(B)の周囲の回転を防止するように第一可動要素(40)に固定力をかけるように構成されている。
(もっと読む)
1 - 18 / 18
[ Back to top ]