
Fターム[2F062HH04]の内容
機械的手段の使用による測定装置 (14,257) | プローブ、測定子 (1,750) | 変位プローブ (355)
Fターム[2F062HH04]の下位に属するFターム
Fターム[2F062HH04]に分類される特許
1 - 20 / 94
表面性状測定機
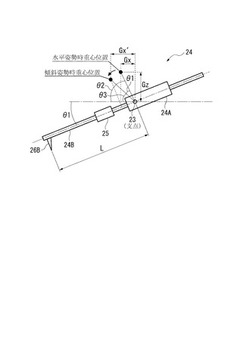
【課題】傾き角度を任意の角度に変更した場合でも正確な測定ができ、メモリ容量も少なく、新たなスタイラスの使用でもユーザに対する作業負担を軽減できる表面性状測定機。
【解決手段】質量の異なる第2測定アーム24Bが取り付けられた測定アーム24の種類毎に、測定アーム全体の質量M、支点(回転軸23)からスタイラス26Bまでのアーム長L、測定アームが水平姿勢時において測定アームの水平方向重心位置Gxおよび上下方向重心位置Gzを記憶した測定アームテーブルと、測定アーム指定手段と、検出手段の傾斜角度θ1を検出する傾斜角度検出器と、指定された測定アームのM、L、GxおよびGzを測定アームテーブルから読み出し、これらと傾斜角度検出器で検出された傾斜角度θ1とから、測定アームの水平姿勢時の測定力と測定アームの傾斜姿勢時の測定力との差を演算し、この差を補正値として測定力を調整する制御装置とを備える。
(もっと読む)
触針式測定装置

【課題】触針が測定点の直上に位置している状態において測定対象物の表面の測定点を実質的に真上から検知することを可能とする観察手段を備えた触針式測定装置を提供する。
【解決手段】触針式測定装置100において、長手軸線方向に延在する細長い触針110であって、測定対象物10の表面12の所定の測定点14に運ばれて同測定点14に接触するようにされる尖端部112を有する触針110と、該触針110の周囲の少なくとも一部に配置され、表面12の測定点14及び該測定点14の周囲からの光を受光する受光部130と、を備え、受光部130で受光した光に基づき、測定点14に対する尖端部112の位置決めを行う。
(もっと読む)
関節式プローブヘッド
【課題】高速走査を精度と共に達成するため、測定システムの運動質量、動的誤差を最小にする関節式プローブヘッドを提供する。
【解決手段】CMMは、その直線駆動に関する回転誤差(例えばピッチ,ロールおよびヨー)のための誤差マップが作成される。走査ヘッドもまた、回転誤差のための誤差マップが作成される。測定データは、CMMおよび走査ヘッドの組み合わされた回転誤差に関して実時間に同期して誤差補正される。この同期補正ためCMMおよび走査ヘッドの誤差マッピングデータを使用する。
(もっと読む)
真円度測定機
【課題】 被測定物の真円度の測定を迅速かつ正確になすことができる真円度測定機を提供する。
【解決手段】 測定子19を被測定物7の外周面に接触させた状態で、被測定物7を軸心廻りに回転させて、被測定物7の外周面の変位を変位測定器2により測定し、該測定結果の情報を管制部4に送信し、管制部4で前記情報により算出された結果により被測定物7の真円度の測定を行うようにした真円度測定機であり、機械テーブル33に吸着解除可能に吸着されるマグネット吸着部30とマグネット吸着部30に対して移動調整可能とされた測定器取付部とを有するマグネットスタンド3を具備し、変位測定器2をマグネットスタンド3の測定器取付部に取り付けて、変位測定器2の測定子19を被測定物7の外周面に接触させるようにした。
(もっと読む)
接触式プローブおよびその製造方法
【課題】微細な孔内の形状測定が行えるとともに屈曲部分の干渉が回避できる接触式プローブおよびその製造方法を提供すること。
【解決手段】直径100μm未満の微細孔内の形状等を測定するために用いられる接触式プローブ10として、棒状のステム11と、前記ステム11に対して交叉方向へ延びるチップ12と、前記チップ12と前記ステム11とを接合する接合部13とを設け、前記ステム11と前記チップ12との間の挟み角αが90度以下であるとする。
(もっと読む)
表面形状測定用触針式段差計の性能改善方法及び該方法を実施した表面形状測定用触針式段差計
【課題】支点上でバランスする探針と変位センサで構成される触針式段差計の感度と変位分解能を向上させる方法及び該方法を実施している表面形状測定用触針式段差計を提供する。
【解決手段】Fを探針に加える力、Iを支点回りの慣性モーメント、rを支点−探針間の距離、zを探針の先端の変位、tを時間としたときに成り立つ、探針の先端の運動方程式F=I/r2d2z/dt2に基づき、探針に加える力に応じて支点−探針間の距離rを決め、支点と探針の先端とを結ぶ線を水平より45度傾け、探針の先端を下げる。
(もっと読む)
触針式表面形状測定器
【課題】変位センサ等に影響を与えずに、蓋部材の着脱を簡単にすることができる触針式表面形状測定器を提供する。
【解決手段】触針式表面形状測定器は、差動トランスを支持する第一支持部材2及び探針16を支持する第二支持部材15を収容する収容ケース1を設け、ケース本体1aと、蓋部材1bとから成り、前記ケース本体1aに、2つの蓋固定用磁石を、それらの磁極が互いに反対向きになるように隣接して配置すると共に、前記蓋部材固定用磁石の側面及び一端面を囲むように強磁性体材料から成る周囲壁を設け、前記蓋部材1bにおける、ケース本体1aに装着した時に前記蓋部材固定用磁石に対面する位置に、強磁性体材料から成る被吸着部を設け、蓋部材1bをケース本体1aに装着した時に、ケース本体1aの周囲壁と前記蓋部材1bの被吸着部とで前記蓋固定用磁石の周囲が囲まれる。
(もっと読む)
表面形状測定用触針式段差計及び該段差計における測定精度の改善方法
【課題】表面形状への追随性が良く、かつ、変位雑音が小さい表面形状測定用触針式段差計及び該段差計における測定精度の改善方法を提供する。
【解決手段】変位センサ20の磁性体コアに固有雑音の小さい強磁性体のコアを使用し、低雑音の差動トランスとして形成し、低雑音の差動トランスの出力を、低雑音のデジタルロックインアンプで計測し、変位の測定結果からセンサ20の固有振動に起因する雑音を、低域通過フィルターを用いて移動平均法で除去し、低域通過フィルターの遮断周波数を通常の15Hz程度よりも高くする。
(もっと読む)
表面粗さ測定装置、及び、その測定待ち時間設定方法、並びに、測定待ち時間設定プログラム
【課題】測定開始時間を短縮化するとともに、測定範囲が狭い部位も測定可能とする表面粗さ測定装置を提供する。
【解決手段】まず、ピックアップ16で所定の試験片80を走査し変位の測定データを取得する。測定はピックアップ16の移動開始直後から実施する。次に測定により得られた変位の測定データを解析し、測定値が安定し始める点を測定値安定開始点として検出する。次に、ピックアップ16が測定値安定開始点に到達するまでに要する移動時間を求める。そして、求めた移動時間を測定待ち時間に設定する。
(もっと読む)
内周面測定装置
【課題】エンジンのシリンダブロック等の貫通穴の内周面を簡便に測定する内周面測定装置を提供する。
【解決手段】内周面測定装置1は、測定スピンドル29と第1支持部5と第2支持部17とガイドブロック48とを有する。第1支持部5及び第2支持部17はシリンダブロック2の両端面に着脱自在に取付られ、シリンダブロック2の貫通穴3に挿通された、測定スピンドル29を回転自在に支持する。測定スピンドル29は、円筒形状であり、内面32を切欠いて回転軸30の方向に略平行にのびるスリット33を有する。測定スピンドル29の内側に配置されるガイドブロック48には、貫通穴3の内周面4を計測する変位センサ51が固定される。ガイドブロック48は、スリット33に係合し回転軸30に沿って測定スピンドル29内を手動でスライド移動する。任意の測位位置において測定スピンドル29を手動で回転させて、内周面4の形状測定を行う。
(もっと読む)
表面性状測定機
【課題】高精度で、しかも、スタイラスや測定アームなどの汚破損を少なくできる表面性状測定機を提供する。
【解決手段】表面性状測定機において、測定アーム24は、ケーシング28内においてブラケット22に回転軸23を支点として円弧運動可能に支持された第1測定アーム24Aと、これの先端に着脱機構25を介して着脱可能に設けられ先端にスタイラス26A,26Bを有する第2測定アーム24Bとを含んで構成され、着脱機構はケーシング内に配置される。測定アームの円弧運動量を検出する変位検出器27は、測定アームに配置されたスケール27Aと、ブラケット22にスケールに対向して配置された検出ヘッドとを含んで構成され、スケールの検出面が測定アームの軸線上で測定アームの円弧運動面上に配置される。
(もっと読む)
表面性状測定機
【課題】測定アームを交換しても、測定アームのバランスを自動的に調整し、使い勝手および作業効率の向上が期待できる表面性状測定機を提供する。
【解決手段】表面性状測定機において、測定アーム24は、ブラケット22に回転軸23を支点として円弧運動可能に支持された第1測定アーム24Aと、これの先端に着脱機構25を介して着脱可能に設けられ先端にスタイラス26A,26Bを有する第2測定アーム24Bとを含んで構成される。測定アームを円弧運動方向へ付勢しスタイラスに測定力を付与する測定力付与手段は、測定アームを回転軸を支点として円弧運動方向へ付勢するボイスコイル62を含んで構成される。第2測定アームの交換後に、ボイルコイルに通電する電流を調整して測定アームのバランスを調整するバランス調整手段が設けられる。
(もっと読む)
座標測定装置
【課題】座標測定装置を用いて一連のワークピースを測定して検査するに際し、迅速かつ高速度に測定を実施しつつも、正確な測定結果を得ることを可能にする。
【解決手段】座標測定装置上で較正済み加工品を高速測定する工程(28)と、較正済み加工品と測定された加工品との間の差に対応する誤差マップを生成する工程(30)と、続くワークピースを同じ高速度で測定する工程(34)と、当該続くワークピースの測定値を誤差マップを用いて補正する工程(36)と、を実行するよう座標測定装置を構成する。加工品とは、ワークピースの一つであってもよい。
(もっと読む)
真円度測定装置及びその心ずれ量補正方法
【課題】測定物の母線と検出点とのずれ量である心ずれ量を算出して補正することにより、基準となる測定物の直径値とは異なる直径値を有する測定物であっても正確な直径値を算出する。
【解決手段】測定物の中心と回転の中心を一致させて、測定物を検出器に対して相対的に回転させ、測定物の真円度を測定する真円度測定装置において、基準測定物に対する前記検出器の検出方向と直交する方向に前記基準測定物を移動させる手段と、前記基準測定物を基準位置から前記検出器の検出方向と直交する方向に移動させたときの各位置における検出値の変化量に基づいて、前記基準測定物の母線と前記検出器の前記基準測定物に対する検出点とのずれ量である心ずれ量を算出する手段と、前記算出した心ずれ量に基づいて、任意の測定物の測定値を補正する手段とを備えたことを特徴とする。
(もっと読む)
タービンブレード測定装置
【課題】タービンブレードの測定装置を提供すること。
【解決手段】測定装置は、ブレードに沿って複数の所定位置にてタービンエンジンの圧縮機ブレード又はタービンブレードの1以上の態様を測定することができる。測定装置は、タービンエンジンの圧縮機ブレード又はタービンブレードの第1の列が位置する限定スペース内に測定装置の個々の要素を移動させることができるように、分解可能である。次いで、要素は、このスペース内で再組み立てされ、ブレードについての測定値が収集できるようにタービンブレードに取り付けることができる。
(もっと読む)
形状測定装置
【課題】プローブの撓みの影響を受けずに高精度の形状測定を行う。
【解決手段】プローブ先端部3に一体に平面ダイクロイックミラー10及び球面ミラー16を設ける。オートコリメータ光学系5により平面ダイクロイックミラー10の傾斜量を測定し、並進移動量測定光学系12により球面ミラー16のX,Y軸方向のずれ量を測定する。ずれ量算出部42bは、測定した平面ダイクロイックミラー10の傾斜量及び球面ミラー16のずれ量に基づいて、プローブ先端部3において被測定物4の表面に接触する接触点となる球19の基準位置に対するX,Y軸方向のずれ量を算出する。推定部42cは、ずれ量算出部42bにより算出されたずれ量から、プローブ先端部3の球19のX,Y軸方向の位置を推定する。
(もっと読む)
制御装置、および測定装置
【課題】制御性能を向上させる制御装置、および測定装置を提供する。
【解決手段】駆動制御回路3は、測定子を変位させる駆動機構25を駆動制御し、駆動機構25に流れる電流を検出する電流検出センサ27と、駆動機構25を駆動させる駆動速度に応じた目標電流を設定する速度制御部32と、目標電流および電流検出センサ27により検出された検出電流の電流偏差に、積分ゲインおよび比例ゲインをかけて駆動機構25に出力する出力電流を設定する電流制御部33と、を具備し、電流制御部33は、駆動機構25の駆動速度に応じて、積分ゲインおよび比例ゲインのうちの少なくともいずれか一方を切り替える。
(もっと読む)
円環状測定物の軸方向形状測定用治具及び軸方向形状測定装置
【課題】円環状測定物の測定点における外周位置及び内周位置の各軸方向形状を正確に測定するための円環状測定物の軸方向形状測定用治具及び軸方向形状測定装置を提供すること。
【解決手段】円環状測定物8の軸方向形状測定用治具1は、円環状測定物8の測定点Pにおける外周位置及び内周位置の各軸方向形状をそれぞれ測定する際に用い、架台2、回動軸3、回動ベース4及び保持する複数の保持クランプ41を備えている。複数の保持クランプ41は、回動軸3の回動中心Aに円環状測定物8の測定点Pを合わせて円環状測定物8を保持する。回動ベース4は、回動軸3の回動中心Aを中心に回動することによって測定点Pを中心に回動して、測定点Pの外周位置を所定の測定方向に向けた第1回動位置401と、測定点Pの内周位置を所定の測定方向に向けた第2回動位置とに回動停止させる。
(もっと読む)
ころ外周面測定治具
【課題】ころ軸受用のころの外周面を円周方向に測定する際、簡単にころの着脱及びセンタリングが出来、作業性を向上させ、測定を効率化することが出来る治具を提供する。
【解決手段】本発明に係るころ外周面測定治具は、ころを押し込む為の空洞が設けられており、前記ころを押し込む部分が弾性体からなることを特徴とする。また、ころ外周面測定治具には、エアー抜き穴を設けることが好ましい。また、前記空洞の奥の面には、凸部を有することが好ましい。
(もっと読む)
幾何誤差計測システム
【課題】不適切な幾何誤差に基づく補正の実行により多軸工作機械の加工精度が低下する事態を、きわめて効果的に防止することが可能な幾何誤差計測システムを提供する。
【解決手段】幾何誤差計測システムSは、予め幾何誤差の閾値を設定可能な閾値記憶領域25と、同定した幾何誤差が閾値を上回っている場合にその事態を報知する出力手段32と、幾何誤差設定値を更新記憶可能なパラメータ記憶領域26とを有している。そして、新たな幾何誤差の計測後に、その計測値に、パラメータ記憶領域26に記憶されている幾何誤差設定値を加算することによって、新たな幾何誤差設定値を算出するとともに、新たに計測された幾何誤差あるいは算出された新たな幾何誤差設定値の内のいずれか一方が閾値を上回っている場合には、幾何誤差設定値を自動更新せず、手動による新たな幾何誤差設定値の設定を可能とする。
(もっと読む)
1 - 20 / 94
[ Back to top ]