
Fターム[2F062HH27]の内容
機械的手段の使用による測定装置 (14,257) | プローブ、測定子 (1,750) | フィーラ接触方向の変更 (35)
Fターム[2F062HH27]の下位に属するFターム
Fターム[2F062HH27]に分類される特許
1 - 20 / 34
表面性状測定機
【課題】測定アームに最適な測定力を発生させる表面性状測定機を提供する。
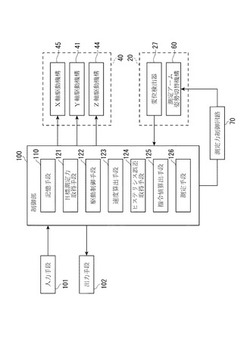
【解決手段】表面性状測定機は、ブラケットに回転軸を支点として円弧運動可能に支持される測定アーム、測定アームの先端に設けられたスタイラス、及び、測定アームを円弧運動方向へ付勢するボイスコイルを備え、スタイラスに測定力を付与する測定アーム姿勢切替機構60を備えるスタイラス変位検出手段20と、制御部100と、を具備し、制御部100は、ヒステリシス誤差を取得するヒステリシス誤差取得手段124と、目標測定力を取得する目標測定力取得手段121と、目標測定力及びヒステリシス誤差に基づいて、測定力指令値を算出する指令値算出手段125と、測定力指令値に基づいてボイスコイルに電流を入力する駆動制御手段122と、を備える。
(もっと読む)
眼鏡枠形状測定装置

【課題】測定機構への埃の進入を軽減する。
【解決手段】フレーム保持手段100が、左右のリムRIL、RIRを挟み込んで保持する第1スライダー102及び第2スライダー103を有し、クランプピン230a、230bを持つ左リムクランプ機構とクランプピン230a、230bを持つ右リムクランプ機構とがそれぞれ第1スライダー102及び第2スライダー103に配置され、第1スライダーが左右のリムの上側に当接する第1面1021を有し、第2スライダーが左右のリムの下側に当接する第2面1031を有する。フレーム保持手段は、第1面と第2面との間隔が変化する方向に第1スライダー及び第2スライダーを移動可能に保持する移動手段であって、第1面と第2面とが接触される第1状態と、左右のリムを保持するために第1面と第2面とが離された第2状態と、に切換え可能に構成されている。
(もっと読む)
眼鏡枠形状測定装置
【課題】高カーブフレームの精度の良い測定を可能にし、型板測定においても型板トレースの精度の向上を図ることが可能な眼鏡枠形状測定装置を提供する。
【解決手段】測定子281が取り付けられた測定子軸282を傾斜可能に保持する保持ユニット250と、測定子軸の傾斜角度を検知する手段と、XY移動手段と、Z方向の軸を中心に回転する回転手段265と、を有する測定ユニットを備え、型板測定モード時に、測定子軸の背面を型板のエッジに接触させるように回転手段及びXY移動手段を制御する制御手段と、保持ユニットのXY方向の位置情報、回転手段の回転情報及び傾斜角の検知情報とに基づいて型板の動径情報を求める演算手段と、を備え、制御手段は、型板の測定途中では、測定済み情報に基づき、測定子軸の背面が型板のエッジに接触したときに測定子軸の傾斜が垂直を維持するように、回転手段及びXY移動手段を制御する。
(もっと読む)
関節式プローブヘッド
【課題】高速走査を精度と共に達成するため、測定システムの運動質量、動的誤差を最小にする関節式プローブヘッドを提供する。
【解決手段】CMMは、その直線駆動に関する回転誤差(例えばピッチ,ロールおよびヨー)のための誤差マップが作成される。走査ヘッドもまた、回転誤差のための誤差マップが作成される。測定データは、CMMおよび走査ヘッドの組み合わされた回転誤差に関して実時間に同期して誤差補正される。この同期補正ためCMMおよび走査ヘッドの誤差マッピングデータを使用する。
(もっと読む)
タッチプローブ
【課題】細穴の奥や突起部を有するような被測定物でも高精度、かつ高速に測定を行うタッチプローブを提供する。
【解決手段】プローブ本体12と、前記プローブ本体12の先端部に形成された、被測定物と接触する測定子14と、前記プローブ本体12内に形成され、前記プローブ本体12の軸方向に垂直でかつ互いに直交する2方向に変位可能に構成された変位機構と、前記2方向の各変位を検出する前記変位機構に設けられた変位検出部25
a、25bと、を備えたことを特徴とするタッチプローブ1を提供する。
(もっと読む)
表面性状測定機
【課題】穴の内面測定時に、測定アームの姿勢を切り替えても、スタイラスや被測定物を損傷することが少ない表面性状測定機を提供する。
【解決手段】揺動可能な測定アーム24、この測定アームの先端に設けられた一対のスタイラス26A,26B、および、測定アームの揺動量を検出する検出部27を有するスタイラス変位検出器20と、被測定物を載置するステージと、検出器とステージとを相対移動させる相対移動機構とを備えた表面性状測定機において、測定アームが揺動方向の一方向に付勢される姿勢および他方向に付勢される姿勢に切り替える測定アーム姿勢切替機構60と、測定アーム姿勢切替機構によって測定アームの姿勢が切替動作された際に、測定アームの切替動作速度を予め設定された速度に制御する速度制御機構70とを備える。
(もっと読む)
ボールねじの測定装置および測定方法
【課題】ボールねじナットの内周面の溝形状の検査を容易且つ短時間で行う。
【解決手段】ボールねじナットを回転テーブル22により回転自在に支持するとともに、その回転角度をロータリエンコーダ23で測定し、測定子3をXYZテーブル12により、XYZ方向に移動自在に支持するとともに、測定子3がボールねじナットの方向に移動するX軸方向の変位をリニアゲージ13により測定し、測定子3が上下に移動するZ軸方向の変位をダイヤルゲージ14により測定する。これらセンサの検出信号をもとに、ボールねじナットにおける測定子3の位置座標を演算し、位置座標をもとにボールねじナットの各部の測定を行う。
(もっと読む)
測定システム
【課題】高速、かつ少ない振動およびエラーで部品表面の多数の座標ポイント取得できるようにする。
【解決手段】基準表面に対して可動サポートを位置決めするための1つ以上のアクチュエータとを含む測定システムであって、前記可動サポートが、サポートコネクタと、前記可動サポートと取り外し可能に接続された、前記基準表面に位置決めされたワークピースの表面の走査経路にある複数のポイントを測定するための走査プローブと、前記サポートコネクタと相互作用するように配置された、モジュラ回転取り付け具を前記可動サポートに接続させるための第1のコネクタ90、およびプローブコネクタと相互作用するように配置された、前記走査プローブを前記モジュラ回転取り付け具に接続させるための第2のコネクタ40を備えるモジュラ回転取り付け具と、前記第2のコネクタを前記第1のコネクタに対して回転させるためのアクチュエータ58とを有す。
(もっと読む)
座標位置測定装置による測定エラーの修正
座標位置測定装置のためのエラー修正方法を開示する。この方法は、(i)各々が第一の物体の表面上のある位置を表す1つまたは複数の第一のデータ値を含む第一のデータセットを取得するステップと、(ii)各々が第一の物体の表面上のある位置を表す1つまたは複数の第二のデータ値を含む第二のデータセットを取得するステップと、(iii)各々が、第一のデータセットにより説明される表面と第二のデータセットにより説明される表面の間の位置差を表す1つまたは複数のエラー値を含むエラーマップを計算するステップと、を含む。第一の物体の面法線が第一のデータ値の各々によって表される各位置において既知であり、ステップ(iii)は、実質的に既知の面法線の方向の位置差を判断することによって各エラー値を計算するステップを含む。加工または測定作業は、第一の物体または第一の物体と名目上同一の物体について実行され、その表面上の位置がステップ(iii)で計算されたエラーマップを使って修正される。 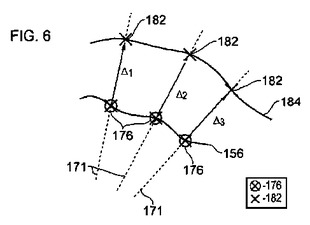 (もっと読む)
(もっと読む)
測定子、及び真円度測定機
【課題】測定の精度や、分解能を低下させることなく、心出しの作業にかかる時間を短縮することができる測定子の提供。
【解決手段】測定子2は、筒状部材3と、棒状部材4と、押圧部材5とを備える。筒状部材3は、先端に開口3Aを有する角筒状に形成される。この筒状部材3の内側面における先端側には、凸部31が形成されている。棒状部材4は、被測定物に接触させる接触子4Aを先端側に有する角棒状に形成され、基端側が筒状部材3の開口3Aから筒状部材3の内部に収納される。この棒状部材4の先端側には、凸部31に嵌合される第1凹部41が形成され、基端側には、凸部31に嵌合される第2凹部42が形成されている。押圧部材5は、筒状部材3の内側面における凸部31と対向する位置に設けられ、棒状部材4を凸部31に向かって押圧する。
(もっと読む)
関節プローブヘッド
【課題】関節プローブヘッドの回転軸をロックするためのブレーキを提供する。
【解決手段】支持体に取り付くための第1のマウントと、表面検出装置が取り付け可能な第2のマウントとを備え、第2のマウントが第1のマウントに対し一以上の軸回りに回転可能である関節プローブヘッドにおいて、第1のマウントに対する第2のマウントの一以上の軸回りの位置をロックするための少なくとも一以上の機械式ブレーキが設けられ、これにより、少なくとも一つの位置測定装置が、ロック位置において、第1のマウントに対する第2のマウントの一以上の軸回りの位置を決定すべく設けられる。
(もっと読む)
画像プローブの校正方法および形状測定機
【課題】画像プローブの校正方法を提供すること。
【解決手段】画像プローブ3の撮像方向を垂直にした状態で画像プローブ3および各測定子611A,611Bによりそれぞれ校正ゲージ62を測定し、画像プローブ3の光軸中心および各測定子611A,611Bの相対位置関係を求める。次に、一方の測定子611A,611Bにより基準球63を測定し、基準球63の位置を登録する。続いて、画像プローブ3の撮像方向を傾斜させた後、各測定子611A,611Bで基準球63を測定し、該測定結果と登録した基準球63の位置とから測定機1上の各測定子611A,611Bの位置を求める。画像プローブ3の光軸中心および各測定子611A,611Bの相対位置関係は既に取得しているので、求めた測定機1上の各測定子611A,611Bの位置から画像プローブ3の光軸周りの回転角度および画像プローブ3の位置を校正できる。
(もっと読む)
三次元形状測定装置用プローブ及び三次元形状測定装置
【課題】鉛直面及び水平面いずれについても小さい測定力による測定を可能とする。
【解決手段】三次元形状測定装置用プローブ1は、取付用部材2、揺動部3、連結機構、アーム取付部120、及び板バネ9A,9B、及び取付用部材2を備える。アーム取付部120にはスタイラス121が下端に配置されたアーム122が垂下して取り付けられている。アーム取付部120は板バネ9A,9Bを介して揺動部3に保持されている。揺動部3は連結機構によって水平方向に傾動可能に取付用部材2に連結されている。揺動部3の可動側磁石と取付用部材2の固定側磁石との間の磁気的吸引力によりアーム122が鉛直方向に延びる中立位置に揺動部3を復元させる復元力が作用する。鉛直面測定時の測定力は可動側磁石との間の固定側磁石の磁気的吸引力により得られる。水平面測定時の測定力は板バネ9A,9Bが鉛直方向に撓むことで得られる。
(もっと読む)
真円度測定装置
【課題】本発明の解決すべき課題は、切り欠きを有する被測定物、あるいは小径穴の内面測定を行う際にも測定プログラムを停止することなく連続測定を行うことのできる真円度測定装置を提供することにある。
【解決手段】被測定物を載置する回転テーブル14と、
前記被測定物24の略円形測定面に傾斜接触する接触式スタイラス26と、
前記スタイラス26を所定ストローク範囲内で傾斜角変更可能に保持する保持手段40と、
前記スタイラス26と前記測定面との接触に伴う、前記スタイラス26の傾斜角変位を検出する変位検出手段42と、
前記変位検出手段42の出力に基づき、前記スタイラス26先端位置を推測し、該スタイラス位置における最適ストローク範囲を保持手段に指示する制御手段32と、
を備えたことを特徴とする真円度測定装置。
(もっと読む)
寸法測定装置
【課題】初心者であっても容易かつ高精度にワークの凹部間の寸法を測定することができる寸法測定装置を提供すること。
【解決手段】マイクロメータ11の可動部12及び固定部15に設けられた各測定子13,16を、ワーク5の両側に形成された各凹部5a,5bに当接させてワーク5を挟み込み、各測定子13,16間の距離から各凹部5a,5b間の寸法Tを測定する寸法測定装置10であって、ワーク5を保持し基台6に対して揺動可能に設けられたクランプ20と、可動部12の測定子13を、可動部12に対して微動可能に保持するスプリング14とを備え、ワーク5を各測定子13,16によって挟み込んだ状態で、マイクロメータ11を揺動させることにより、クランプ20がワーク5とともに揺動し、スプリング14が測定子13を微動させて、各測定子13,16の先端を各凹部5a,5bの底に当接させる。
(もっと読む)
スタイラス、形状測定機及びパートプログラム
【課題】本発明の目的は、ワークに関して複数項目を測定する際の高効率化及び高精度化を実現することにある。
【解決手段】接触式検出器16の本体18に設けられ、軸方向を中心に回転角度を変更自在に保持される一の支持軸部22と、該支持軸部22の側部より突出し、該支持軸部22より突出する方向が異なる複数の測定用軸部24,26と、該各測定用軸部24,26の先端に設けられ、該各測定用軸部24,26毎に先端形状ないし先端寸法が異なる複数の接触部28,30と、を備え、該支持軸部22の軸方向を中心に該支持軸部22の回転角度が調整されることにより、該複数の接触部28,30の中から測定目的に応じた一の接触部28(30)が選択され、該選択された接触部28(30)のみが該ワーク21に接触され、該ワーク21の形状データの取得に用いられることを特徴とするスタイラス20。
(もっと読む)
形状測定装置および方法
【課題】 急傾斜面を接触式プローブにより測定すると、安定して接触力を制御することができず、高精度で高速な形状測定を行なう事ができなかった。
【解決手段】 接触式プローブを被測定物の表面に沿って移動させることで、被測定物の表面形状を測定する形状測定方法において、接触式プローブの軸方向の変位と、接触式プローブの姿勢とを測定し、その測定結果から、接触式プローブが被測定物から受ける接触力ベクトルを計算し、接触力ベクトルの大きさが一定になるように、接触式プローブを前記接触力ベクトルと直交する方向に移動させる。
(もっと読む)
多関節型座標測定装置のパラメータ校正方法
【課題】 測定アームのパラメータの校正作業に要する手間や時間を削減することのできる多関節型座標測定装置のパラメータ校正方法を提供する。
【解決手段】 まず、二つの小球22を有する標準器20Aを測定アーム2の操作空間内に設置し、測定アーム2を操作してプローブ3をそれらの小球22に近づけて複数のアーム姿勢で小球22の各々の空間座標を測定し、その測定結果に基づいて一次校正パラメータについてのパラメータ校正処理を行う。つぎに、一つの小球22を有する標準器20Cを測定アーム2の操作空間内に設置し、測定アーム2を操作してプローブ3をその小球22に近づけて複数のアーム姿勢で小球22の空間座標を測定し、その測定結果に基づいて二次校正パラメータについてのパラメータ校正処理を行う。
(もっと読む)
走査ヘッドの較正装置および方法
電動の関節式走査ヘッド(16)における角度測定スケールを、基準加工品(40;60;80)を用いて較正する方法が記載される。この方法は、走査ヘッド(16)に取り付けられた走査プローブ(28)などの表面検出デバイスを走査ヘッド(16)の少なくとも1軸(A1,A2)のまわりに回転させ、基準加工品(40;60;80)に対し異なる複数の角度方向に表面検出デバイスを移動させる工程を含む。次に、その異なる角度方向のそれぞれで、表面検出デバイスにより、基準加工品(40;60;80)の少なくとも1つの特性を測定する工程が実行される。そして、測定された基準加工品(40;60;80)の特性を用い、また付加的に既知または較正済みの基準加工品(40;60;80)の特性を用いて、走査ヘッドの少なくとも1つの測定スケールに対する誤差マップまたは関数を生成する。この方法は、走査ヘッド(16)を移動させるために、座標測定機械(14)などの座標位置決め機械の使用を含むことができる。基準加工品(40;60;80)は、単一の特徴部または配列された複数の特徴部(46;66)を含むことができる。 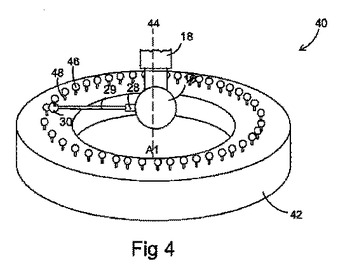 (もっと読む)
(もっと読む)
表面測定装置および方法
例えば、バルブ・シートなどの表面構造の寸法と位置を決定する方法を提供する。構造の表面は、例えば、接触プローブを持つ螺旋状の走査パスを用いて測定され、走査から取得された複数のデータ・ポイントは、デジタル化されたイメージを作り出すのに使用される。 デジタル化されたイメージは、表面構造の公称イメージ(例えば、CADデータ)に合わせられる。デジタル化されたイメージの公称イメージからのずれは、表面構造の寸法、位置、および形状ずれのうちの少なくとも一つを決定するために用いられる。 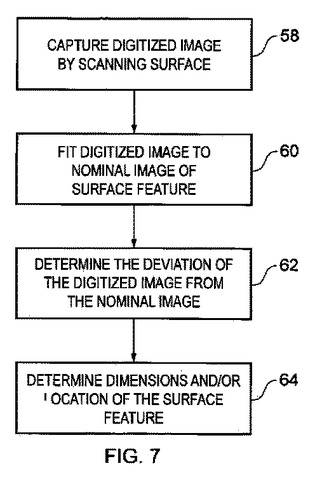 (もっと読む)
(もっと読む)
1 - 20 / 34
[ Back to top ]