
Fターム[2F062NN01]の内容
機械的手段の使用による測定装置 (14,257) | 測定の後処理 (180) | 測定値の利用 (173)
Fターム[2F062NN01]の下位に属するFターム
Fターム[2F062NN01]に分類される特許
1 - 20 / 58
表面形状測定プローブおよびその校正方法
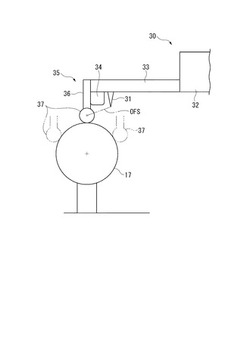
【課題】マスターボールによるスタイラス先端座標の校正を行うことができる表面形状測定プローブおよびその校正方法を提供すること。
【解決手段】表面形状測定プローブ30のスタイラス31の近傍に校正用接触子35を装着し、スタイラス31の先端と校正用接触子35とのオフセットOFSを測定し、校正用接触子35で三次元測定機の基準器であるマスターボール17を測定して校正用接触子35の座標位置を割り出し、校正用接触子35の座標位置にオフセットOFSを加算してスタイラス31の先端の座標位置を割り出す。
(もっと読む)
形状測定方法、これを用いた加工方法、および形状測定装置

【課題】表面形状の設計値が複数の関数によって定義される場合にも、測定データのアライメント補正を行った上で被測定体の表面形状の設計値からのずれ量として測定することができるようにする。
【解決手段】表面形状の設計値を複数の関数で定義する形状定義工程(S1)と、表面形状の測定データを取得するデータ取得工程(S2)と、測定データを関数の定義域ごとの部分群に区画するデータ区画工程(S3)と、部分群による表面形状の設計値からのずれ量を表す移動パラメータを推定する解析工程(S4、S7、S11)と、この移動パラメータを用いて測定データのアライメント補正を行って、補正済測定データを生成するアライメント補正工程(S5、S8、S12)と、補正済測定データと複数の関数との偏差を形状誤差として算出する形状誤差算出工程(S13)と、を備える形状測定方法を用いる。
(もっと読む)
幾何誤差同定装置
【課題】ミス値を取得してしまったとしても、ミス値を用いることなく幾何誤差の同定を行うことにより、ミス値を用いることによる幾何誤差の同定精度の低下を防止することができる幾何誤差同定装置を提供する。
【解決手段】計測値(たとえばターゲット球の直径の計測値)と(S4)、設定値(予め設定されている直径)とを比較することにより(S5)、計測値が正しい計測値であるか否かを判断し、たとえミス値を取得したとしても当該ミス値を用いることなく、正しい計測にもとづく計測値のみを用いて幾何誤差の同定を行うため(S10)、幾何誤差の同定精度を従来と比較して向上することができる。
(もっと読む)
靴製作用の測定キット
【課題】第1に、専門的知識を有さない対象者を対象として正確な足に関するデータを採取可能となり、第2に、簡単容易に実現され、第3に、個々の足の形状に合った靴の通信販売等が実現され、第4に、低コストで実現される、靴製作用の測定キットを提案する。
【解決手段】この靴製作用の測定キット1は、足型取り器2と測定器3とを別体で備えている。足型取り器2は、弾性を有しない可変材4を備え、足を載せることによって圧縮荷重を受け、塑性変形に基づき表面に少なくとも足の足裏面に対応した凹凸を形成可能である。測定器3は、少なくとも足外形よりも若干前側に伸びた形状を備えており足が載せられる基板5と、基板5の後部外周に付設され足の踵を囲んで保持可能な踵止め6と、基板5の前部表面に表示され足の足長サイズの測定に用いる目盛表示7と、基板5の中央部に設けられ少なくとも足の表面の高さ周りデータを採取可能なメジャー8とを有している。
(もっと読む)
下地材探知具
【課題】探知針の差し込み作業中でも、測定筒体に嵌挿している目盛を指示する測定体が、確実に差し込み深さ目盛を指示し、測定位置の高低にも拘らず測定作業をスムーズに処理できる下地検知具を提供する。
【解決手段】探知針jを出入する針孔を有する筒体a内に一端部が嵌挿し、他端部17が飛出し、且内挿するコイルスプリングの付勢によって押圧される前記探知針jを飛出せしめる測定筒体dを有する下地材探知具において、前記測定筒体dの外周面部13に飛出した探知針jの長さに比例する目盛14を付記せしめると共に、前記測定筒体dに嵌挿する測定体kを嵌挿せしめた。
(もっと読む)
真円度測定装置及び先端子良否判定方法
【課題】先端子の形状変化を簡易に測定可能にする真円度測定装置の判定方法を提供する。
【解決手段】被測定物の表面に接触する先端子の球状の先端部の形状の良否を判定する先端子良否判定方法であって、形状が既知の基準被測定物を基準被測定物の円形の断面の中心が載物台の回転中心に一致するように載置して(101)、基準被測定物の無偏心外形形状を測定し(102)、基準被測定物の円形の断面の中心を載物台の回転中心に対して所定量偏心させて(103)、基準被測定物の偏心外形形状を測定し(104)、無偏心外形形状と偏心外形形状との差から、先端子の球状からの変形量を算出し(105)、算出した変形量が所定の範囲を超えた時に(106)、不良と判定する(108)真円度測定装置の先端子良否判定方法。
(もっと読む)
角度計
【課題】アーム部の長さが短くても高精度な角度測定を行える。
【解決手段】角度計1は、第一アーム部2と第二アーム部3が支軸を中心に相対回転可能に支持される。第一アーム部2の中心線は角度表示器5の0度に位置合わせする。支軸と同軸に角度表示器5を第一アーム部3の一端に固定する。第二アーム部3の自由端部に角度器10を設ける。角度器10は周方向に角度目盛りを付した角度表示部8を表示ケース7で囲い一体に回転可能とする。表示ケース7内に設けた球体9は重力方向に位置する。角度器10を関節等に位置決めし、第一アーム部2と第二アーム部3を体幹に沿って直線状に配列し、重力方向に位置する球体9に角度表示部8の0度を一致させる。そして、角度器10を中心に直線の第一アーム部2と第二アーム部3を腕部または大腿部に一致させることで、球体9が回転角度を表示する。
(もっと読む)
ワイヤーたわみ測定装置
【課題】通行支障にならない限定箇所で、微細な荷重変位を正確に測定する、簡単で安価な構成の装置、及びそれを用いて行う劣化コンクリート日常点検方法を提供する。
【解決手段】被測定物側に動滑車を配置し測定装置側に定滑車を配置する、荷重付加時のたわみ量H2は、張設ワイヤーにSL2として表現される。この微量の長さを、滑車を用いて増幅し測定装置側面の点検窓に、その箇所の構造物崩壊推定危険度として、青、黄、赤に数値を併記した図柄で表される。
(もっと読む)
脆性破壊するトルク感応表示体。
【課題】 構造物乃至部材の変形規模、トンネルなど壁面のひび割れの変化を簡易な構成で表示する歪感応表示体とナットの締付けトルクを目視で確認できるトルク感応表示体を得ること。
【解決手段】 構造物乃至部材の変形規模を脆性破壊する歪感応表示体の破断又はひび割れで表示し、又は塗料として所定形状に塗布乾燥させて形成し、また着色した着色歪感応表示体と異色の対比表示層を設け、また破壊点を変更可能な略V字状の切欠部又は溝部を設け、また破壊点が相違する複数枚の歪感応表示体を並設し、また導電性を有する導電性歪感応表示体とし、またトンネルなど壁面のひび割れに横断して設け、またUボルトなど取付保持金具のナットによる締付けトルクを検知するトルク感応表示体とし、また側面側に設けるとし、それら各歪感応表示体で構造物又は該部材が変形する有無と規模を表示する、脆性破壊する歪感応表示体。
(もっと読む)
金属屋根における馳部の溝幅ゲージ
【目的】本発明は、金属屋根8の馳部(馳締部)の溝幅を簡易且つ正確に測定すること。
【構成】測定主板1と、金属屋根8の馳部81の背面基準線81aを支持する被押圧部2と、金属屋根8の馳部81の溝部81c箇所の所定の高さ位置の溝幅の正常幅に相当する間隔を有しつつ、正常値を超えたときに後退するように弾性を有する押圧棒状部31とからなること。被押圧部2と押圧棒状部31とが測定主板1の下方に設けられていること。測定時において前記溝幅が正常値を超えたときに警報信号が検出されるように警報手段Xが備えられてなること。
(もっと読む)
地山の変位検知装置
【課題】簡易な構造のもので地山の変位をリアルタイムに検知し監視できる地山の変位検知装置を提供する。
【解決手段】地山12の変位を検知する変位検知装置20であって、ボアホール22内にボアホール22の入り口22aから奥部方向に予め定められた間隔をおいて設けられる複数の変位計測点箇所にそれぞれ定着され地山12の変位を検知する複数の変位センサー241〜24nと、変位センサー241〜24nに接続され各変位センサー241〜24nの検知信号を各変位センサーごとに取り出す信号ケーブル26と、信号ケーブル26に接続され各変位センサー241〜24nごとに該変位センサーの検知信号を受けて各変位計測点箇所のボアホール22の入り口22aからの距離を変位発生深度として表示する変位深度表示部28とを備える構成にした。
(もっと読む)
車両のホイールアライメント調整方法
【課題】専用の評価装置を設けることなく、アライメント調整装置でスラスト角を調整できる車両のホイールアライメント調整方法を提供すること。
【解決手段】本発明の車両のホイールアライメント調整方法は、車両の左右前後の車輪の位置を検出するステップと、予め設定されている装置中心線MCに平行な方向への車輪13、14のずれ量を測定するセットバック量測定ステップと、左右の車輪13、14の装置中心線MCに直交する方向の距離を測定するトレッド量測定ステップと、測定ステップにより測定したセットバック量Sおよび後軸トレッド量TBに基づいて、スラスト角θを算出するステップと、を備える。
(もっと読む)
グレーチングパネルの自動歪み修正装置
【課題】 グレーチングパネルのねじれ・そりの歪みを修正する方法で、従来治具や機械を使用した手作業で行われているものを、本発明により自動計測自動修正を可能とするものである。現在人海戦術で行われている作業の機械化を確立するものである。
【解決手段】 グレーチングパネルをクランプする機構、ねじれを修正する機構、そりを修正する機構が一つのフレーム内に構成された新規の装置である。
(もっと読む)
形状測定装置、その校正方法、及び校正プログラム
【課題】高精度な校正が可能な形状測定装置、その校正方法、及び校正プログラムを提供する。
【解決手段】形状測定装置は、被測定物4を載置すると共にZ軸を中心として回転可能なテーブル5と、被測定物4に接触可能な測定子24と、測定子24を、互いに直交するX軸、Y軸及びZ軸のうち少なくともX軸及びZ軸方向に駆動する手段と、測定子24のY軸方向の位置を校正するための制御部41とを有する。制御部41は、テーブル5に載置された被測定物4の一部として含むY軸を中心として傾斜した傾斜平面若しくは傾斜円筒側面、又は中心軸がX軸方向にずれた偏心円筒側面を、回転させながら倣い測定することにより得られた測定値の最小値が得られたテーブル5の回転角度を最小検出角として求める手段と、最小検出角に基づいて測定子24のY軸方向の位置を調整する調整量を算出する手段とを含む。
(もっと読む)
表面性状測定装置、表面性状測定方法、及びプログラム
【課題】高精度に接触子の交換判定を実行可能な表面性状測定装置、表面性状測定方法、及びプログラムを提供する。
【解決手段】制御部51は、接触子24を基準ワーク4Aの表面に倣うように駆動すると共に接触子24の所定位置の軌跡を第1擬似測定点列P1iとして取得する。制御部51は、第1擬似測定点列P1i、及び基準ワーク4Aの表面を特定する設計面S0に基づき、接触子24の表面形状を示し且つ擬似空間上に配置される接触子モデルM1を算出する。制御部51は、被測定物4Aの表面41Aを特定する参照面S2に接触子モデルM1の表面が接し且つ測定時の接触子24と接触子モデルM1との姿勢を一致させるように接触子モデルM1を配置し、接触子モデルM1の基準位置Oを、第2擬似測定点列P2iとして算出する。制御部51は、第2擬似測定点列P2iに基づき、接触子24を交換すべきか否かを判定する。
(もっと読む)
繋ぎ目検出装置及び測長装置
【課題】連続帯状体の表面に検出部を変位可能に接触配置し、変位センサー部は変位信号を出力し、A/D変換部が変位データを出力し、しきい値演算部は変位データを基にしきい値を求め、比較判定部は変位データがしきい値よりも大であるとき判定信号を出力し、繋ぎ目信号出力部は判定信号が出力されたとき繋ぎ目信号を出力し、繋ぎ目検出精度を高めることができる。
【解決手段】繋ぎ目Jに凸部を有してなる連続帯状体Wの表面に接触して変位可能な検出部1を設け、繋ぎ目検出装置において、変位信号を出力する変位センサー部5と、変位信号をデジタル数値化して変位データDを出力するA/D変換部6と、しきい値Tを求めるしきい値演算部7と、変位データがしきい値よりも大であるとき判定信号を出力する比較判定部8と、判定信号が出力されたとき繋ぎ目信号を出力する繋ぎ目信号出力部9とを備えてなる。
(もっと読む)
形状測定装置、形状測定方法、及びプログラム
【課題】簡易な構成で高精度に回転体からなる被測定物に特有の測定が可能な形状測定装置、その方法、及びプログラムを提供する。
【解決手段】形状測定装置は、回転体からなる被測定物4を所定の回転軸を中心として回転させながら、被測定物4の各回転角における表面の変位を測定する。形状測定装置の制御部41は、被測定物4の各回転角における表面の変位を予備測定する(S11)。制御部41は、予備測定によって取得された被測定物4の表面形状を示す測定値と予め記憶されている被測定物4の設計値とから測定値の設計値に対するずれ量を算出する(S12)。制御部41は、算出されたずれ量に基づいて被測定物4の姿勢を調整する(S13)。制御部41は、姿勢調整後の被測定物4を回転軸を中心として回転させながら、被測定物4の各回転角における表面の変位を本測定する(S14)。
(もっと読む)
表面性状測定装置、その接触子モデル生成方法、及びプログラム
【課題】高精度で3次元接触子モデルを生成可能な表面性状測定装置、その接触子モデル生成方法、及びプログラムを提供する。
【解決手段】表面性状測定装置は、被測定物に先端が接触可能な接触子24と、接触子24を互いにX軸、Y軸、Z軸に沿って移動させる制御部41とを備える。制御部41は、接触子24を被測定物の表面に倣うように駆動すると共に接触子24の先端位置を疑似測定点Piとして取得する。制御部41は、基準ワーク4を接触子24で倣い測定して3次元接触子モデルM2を算出する。制御部41は、接触子24を、Z軸を中心として回転駆動する。制御部41は、回転駆動される接触子24の複数の回転位置のそれぞれにおいて、接触子24をX軸方向及びZ軸方向に沿って移動させて基準ワーク4を倣い測定して疑似測定点Piを取得し、取得された疑似測定点Piに基づいて3次元接触子モデルM2を算出する。
(もっと読む)
合金鋼の表面上に形成された窒化物層を検出しかつ除去する方法
【課題】その上に磁性表面層が形成された非磁性合金製の構成要素を処理する方法を提供する。
【解決手段】本方法は、(a)較正マグネットゲージの磁石を構成要素の表面と接触させるステップと、(b)磁石を構成要素の表面から引離しかつ該磁石を引離すのに必要な力を測定するステップと、(c)その力を磁性表面層の厚さと相関させるステップと、(d)表面層の厚さが所定の最小厚さよりも大きい場合には、該表面層を除去するステップとを含む。
(もっと読む)
核燃料棒における平行度誤差の測定及び修正のための装置
核燃料棒(6)の上部端栓の平行度誤差測定及び修正装置であって、平行度誤差を測定する手段(20)と、前記誤差を修正する手段(22)と、前記装置を燃料棒上へ位置決めする手段と、を備え、燃料棒が載置されるラックと協働し、前記誤差の修正中にも平行度誤差の測定ができるようにするように、前記修正手段(22)は、燃料棒(6)のロケーション(31)に対して測定手段(20)の反対側に配置されることを特徴とする。 (もっと読む)
1 - 20 / 58
[ Back to top ]