
Fターム[2F063AA11]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 測定内容 (2,719) | 長さ (414)
Fターム[2F063AA11]の下位に属するFターム
移動方向に沿った対象物の (2)
幅 (4)
高さ、段差 (19)
深さ (28)
厚さ (167)
周長、曲線に沿った (3)
太さ (20)
検出器から測定対象物までの距離 (106)
空間隙 (52)
Fターム[2F063AA11]に分類される特許
1 - 13 / 13
印刷位置検出方法
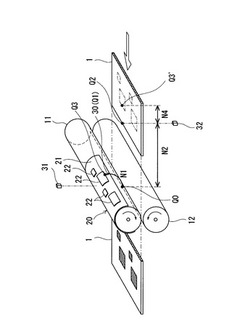
【課題】可撓性シートに対する印刷型の配置が種々である印版を使用して印刷を行う際に、初期段階であっても段ボールシートに印刷される位置を正確に検出することができる、印刷位置検出方法を提供する。
【解決手段】可撓性シート21上の印刷型22の基準点Q3から予め定める所定距離の第一基準点Q1に、印刷型22より高さの低い被検出体30を取り付け、版胴11の回転に伴う被検出体30の通過を第一センサ31によって検出し、挟持点Q0に向かい搬送される段ボールシート1上に第二基準点Q2を設定し、第二基準点Q2の通過を第二センサ32によって検出し、第一センサ31による第一基準点Q1の検出点と挟持点Q0との距離N1、第二センサ32による第二基準点Q2の検出点と挟持点Q0との距離N2、及び、印刷型の基準点Q3と第一基準点Q1との距離に基づき、段ボールシート1において印刷型の基準点に対応する点Q3’を検出する。
(もっと読む)
誘導検出型ロータリエンコーダ

【課題】隣接トラック間でのクロストークを防止して高精度な誘導検出型ロータリエンコーダを提供する。
【解決手段】誘導検出型ロータリエンコーダ11は、ロータ15のステータ13との対向面に内側から順に回転軸に対して同軸的に形成されて第1の受信巻線32a及び第2の受信巻線32bとそれぞれ磁束結合する第1の磁束結合巻線41a及び第2の磁束結合巻線41bを備える。第1の磁束結合巻線41a及び第2の磁束結合巻線41bは、それぞれ1回転で周期的変化を生成する第1のトラック及び第2のトラックを形成する。第2の磁束結合巻線41bは、第1の配線410b、第2の配線420bを有する。第1の配線410bは、歯車状に構成され、スピンドル7に近づく方向に窪む凹部411bと、スピンドル7から離れる方向に突出する凸部412bとを交互に構成する。第2の配線420bは、第1の配線410bの凹部411bを結ぶように形成されている。
(もっと読む)
渦電流探傷試験方法及び渦電流探傷試験装置
【課題】渦電流探傷試験法に特有の物理現象を利用することで長さ評価精度と汎用性が高い渦電流探傷試験方法及び渦電流探傷試験装置を提供する。
【解決手段】本発明は、中心軸方向と被検査面の法線方向が一致している第1のコイル12と、中心軸方向と被検査面の法線方向が一致しており、第1のコイル12と所定の中心間距離d1で配置される第2のコイル13とを有するプローブ11を用いて被検査面の欠陥15を検出し当該欠陥長さLを評価する渦電流探傷試験方法において、プローブ11を走査し被検査面の欠陥に起因する出力電圧分布を取得し、出力電圧分布に現れる二つの極大値を検出し、検出された二つの極大値間の長さd2を算出し、算出された極大値間の長さd2と第1のコイル12及び第2のコイル13の中心間距離d1を加算した結果を被検査面の欠陥長さLと評価する。
(もっと読む)
障害物近接判定装置および障害物近接判定方法
【課題】接近する障害物を検知してその実体像および近接状態を判定すること。
【解決手段】障害物近接判定装置100は、静電容量センサ10と、超音波信号送受信器41〜4Nと、制御回路80とを備え、静電容量センサ10の検知電極11〜1Nは、自動車101の後方のバンパー102に配置された超音波信号送受信器41〜4Nの間にそれぞれ配置されている。制御回路80は、静電容量センサ10および超音波信号送受信器41〜4Nからの情報に基づいて、接近している障害物の材質的観点からの実体像および近接状態を判定する。
(もっと読む)
複雑な幾何学形状を有する部品を検査するための多周波画像処理
【課題】複雑な幾何学形状を有する部品における小さな亀裂及び他の異常を検出する。
【解決手段】多周波渦電流信号からデータを収集することを含めた渦電流検査を含む。生検査画像の信号対雑音比を向上するために、位相解析を使用して多周波データが組合わされる。その後、通常はエッジ効果信号により隠蔽されると考えられる縁部34の亀裂及び他のきずと関連する信号を分離することを目的として、渦電流きず信号の周波数成分と相関するために、時空間フィルタを使用して画像が再処理される。
(もっと読む)
多芯ケーブル長測定装置
【課題】多芯ケーブルのケーブル長を測定でき、測定不可のときにはその原因を短時間で判別する。
【解決手段】LANケーブル1の一の絶縁線2の近端にパルス信号S1(信号S1)を注入するパルス信号生成部13と、一の絶縁線2の近端での信号S1およびその反射信号Sr(信号Sr)を検出する信号検出部17と、信号S1の検出から信号Srの検出までの経過時間に基づいてLANケーブル1の長さを測定する処理部20と、一の絶縁線2の近端にステップ信号S3(信号S3)を注入するステップ信号生成部14と、遠端で抵抗32を介して一の絶縁線2と接続された他の絶縁線2の近端に伝達する信号S3の電圧を測定する電圧測定部19とを備え、処理部20は、信号S3の注入から第1、第2の時間を経過した時点での信号S3の各電圧の電圧差が基準電圧未満のときにLANケーブル1が下限値未満の長さであると判別する。
(もっと読む)
破片検出センサ
【課題】 液体中に混入したセラミック材等の非金属,非磁性,非導電性を特徴とする材料の破片を検出することができる破片検出センサを提供する。
【解決手段】 この破片検出センサは、液体中に混入する破片を検出するセンサである。2つの対面する平板5,7と、これら2つの平板5,7のうちの少なくとも一つの平板7を対面方向に動かして上記2つの平板5,7に破片を挟み込ませる平板移動機構9と、測定・判定手段16とを備える。測定・判定手段16は、前記2つの平板5,7間の距離を測定することで、前記破片の有無、大きさ、または蓄積量を検出する。
(もっと読む)
渦電流探傷法による表面欠陥長さ評価方法及び装置
【課題】本発明の目的は、スケールを用いた目視検査や浸透探傷に依らずに、渦電流探傷法で金属性の被検査体の表面欠陥の長さについて評価する方法を提供することにある。
【解決手段】渦電流探傷法で励磁コイル1と検出コイル2を白抜き試験体3上で矢印の方向へ走査し、各走査位置での出力電圧を検出コイル2の出力に基づいて渦電流探傷器で測定し、各走査位置での出力電圧の分布を示す出力電圧の分布曲線5の情報から、左側の最大値から左側へ下る差分電圧範囲Vp−pで12デシベルダウンの位置情報を抽出し、右側の最大値から右側へ下る差分電圧範囲Vp−pで12デシベルダウンの位置情報を抽出し、両位置情報の間の距離を計算して試験体3の表面欠陥であるスリット4の長さとして評価する。
(もっと読む)
スポット溶接ロボットの電極チップ整形監視方法及び同監視装置
【課題】 電極チップ整形監視装置を簡素化でき、ロボットのティーチングが不要で、且つサイクルタイムに影響を与えないようにする。
【解決手段】 スポット溶接ロボットに設けた各軸回りに電極チップを回動させるためのサーボモータ24における回転軸の回転位置、回転軸の回転速度及びモータ電流をそれぞれフィードバック制御するサーボモータ制御部70Aのフィードバック量(即ち、検出電流If、位置情報Pf、速度情報Vfのうちの少なくとも一つ)と、このフィードバック量に対応させて予め設定した設定値幅とを比較することにより、電極チップの整形状態及びチップドレッサの作動状態を監視する。
(もっと読む)
アブソリュートロータリエンコーダ及びマイクロメータ
【課題】小型化しても高精度測定が可能なアブソリュートロータリエンコーダを提供する。
【解決手段】ロータ3には、トラック41、43が同心円状に配置されている。トラック41は外側に配置され、受信巻線17及び送信巻線群G2と磁束結合可能にされている。これに対して、トラック43は内側に配置され、受信巻線19及び送信巻線群G2と磁束結合可能にされている。トラック41、43は、それぞれ、軸9を中心とする連続した一つのリング状の磁束結合巻線51、53である。磁束結合巻線51、53を構成するブロック61の数は、トラック41が10個で、トラック43が9個である。
(もっと読む)
ローラ間の接触幅を測定する装置および方法
本発明は互いに圧接された2つのローラ間の圧力(又はこの圧力によって相互接触領域に生じた変形)を測定する装置に関する。本発明は、例えば印刷プレス或いは圧延機のような、互いに押圧されたローラを有する機械および機械的アッセンブリの分野に適用される。本発明はまた、例えば変形可能なシールリング又は組立工程における接着剤又はパテのラインのための、圧潰幅の測定に関する。この装置はローラ間に挿入される薄いセンサーを備え、このセンサーの形状は、センサーが測定位置にある時に、センサーを操作部分に連結する機械的リンク(131)がニップ領域内に(又は前記ニップ領域(ZP)に関して操作部分とは反対側に)位置するように構成された折返し(14)を有する。 (もっと読む)
分注ヘッド
【課題】 ポンプ構造を大型化することなく、吸引・吐出液量を精度よく制御し、液量のばらつきを小さくできるようにする。
【解決手段】 一方端にノズル30が設けられたシリンジ20と、このシリンジ20の他方端から挿入されるプランジャ5と、これを駆動させる直動アクチュエータ40とを備え、プランジャの駆動によりノズルから溶液を吸引または吐出する分注ヘッドにおいて、プランジャーは、直動アクチュエータとの連結側を伸延して摺動可能な保持部材52で保持し、直動アクチュエータは、伸延したプランジャーの一部に磁石41を固定した可動子41と、可動子と空隙を介して電機子巻線43を用いた固定子とからなる電磁方式とし、保持部材52の近傍にプランジャーの位置を検出する位置検出センサ50を設けたものである。
(もっと読む)
コンピュータスイッチ装置のライン長さ測定装置およびその方法
【課題】 ビデオ信号を伝送するのに用いる伝送ラインのライン長さを測定し、伝送ラインが少なくとも三本のサブラインを有するライン長さ測定装置を提供する。
【解決手段】 ライン長さ測定装置100は、信号合成回路102、信号変換回路106およびライン長さ計算回路108を少なくとも備える。ビデオ信号の垂直同期信号が有効なとき、信号合成回路102には電気信号がサブラインの一つへ重ねて入力される。信号変換回路206はサブラインにより伝送された後の電気信号を数値へ変換する。ライン長さ計算回路108は、数値を基にして伝送ライン104のライン長さを算出する。
(もっと読む)
1 - 13 / 13
[ Back to top ]