
Fターム[2F063AA31]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 測定内容 (2,719) | 角度 (791)
Fターム[2F063AA31]の下位に属するFターム
Fターム[2F063AA31]に分類される特許
1 - 18 / 18
角度測定装置及び方法
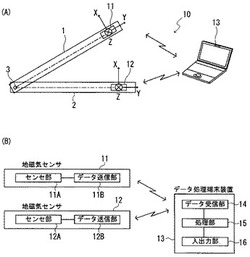
【解決課題】物体、動物、人間において形成される角度、具体的には人間における各関節部の角度や、各種装置、構造物などの構成要素同士が形成する角度など、複数の部位のなす角度を形成する複数の部位それ自体が静止状態であっても、積分処理を行わずにそのなす角を測定可能な角度測定装置及び方法を提供する。
【解決手段】複数の部位1,2のなす角度を求める角度測定装置を、部位1,2にそれぞれ取り付ける地磁気センサ11,12と、地磁気センサ11,12から出力したデータに基づいて複数の部位1,2がなす角度を求める処理部15と、部位1,2への地磁気センサ11,12の取付態様の違いを補正するための補正情報を格納する補正情報格納部17とを備える。処理部15が、補正情報格納部17に格納した補正情報を参照して、各地磁気センサ11,12から出力されたデータを補正し、複数の部位1,2のなす角度を求める。
(もっと読む)
磁界検出装置および計測装置

【課題】磁気抵抗素子やトランスデューサ素子を用いたブリッジ回路では信号出力にオフセット電圧が発生し、計測精度が低下するという課題があった。
【解決手段】磁気抵抗素子やトランスデューサ素子を用いたブリッジ回路では信号出力にオフセット電圧が発生し、計測精度が低下するという課題があったので、磁気抵抗素子やトランスデューサ素子で構成するハーフブリッジをそれぞれ異なる励起電圧で励起することでオフセット電圧を除去し、計測精度を向上させた。
(もっと読む)
延在する導電体間のトンネル電流を用いた測定
【課題】高精度な、角度、直線またはその他の相対的な位置または変位の細密な測定およびモニタリングを提供する。
【解決手段】二つの要素の相対的な位置又は変位のそれぞれの要素と関連するようになっている一対の長い導電体10、11と、前記導電体10、11の間に電気的ポテンシャルの差を与えることで、その間に検出可能な量子的トンネル電流が発生するように、前記導電体10、11を相互に離隔させて配置する手段12、13、18とを有する。
(もっと読む)
位置検出装置
【課題】検出対象の変位を検出する検出回路に発生した異常をその動作電源をオンした際に即時に検出することができる位置検出装置を提供すること。
【解決手段】電源がオンされると、マイクロコンピュータ23は、まず第1ラインL1(出力端子−Vo1)をグランドに接続し、次に第2ラインL2(出力端子+Vo1)をグランドに接続し、最後に第1ラインL1(出力端子−Vo1)及び第2ラインL2(出力端子+Vo1)をグランドに接続する。マイクロコンピュータ23は、これら3つの接続状態としたときに、第1差動増幅回路26から出力される信号の電圧レベルと正常時に前記3つの接続状態としたときの出力信号の電圧レベルとの比較を行い、正常時と異なった電圧レベルの信号が入力されたときには第1磁気センサ20若しくは第1差動増幅回路26に異常があると判断する。
(もっと読む)
自在継手のジョイント角検出装置
【課題】取り付けの制約が少なく正確に測定可能な自在継手14のジョイント角測定装置10を提供する。
【解決手段】スパイダ52の第1軸部48の一方の軸端54とその軸端54に相対回動可能に連結されたアーム部22とに設けられてそれらの間の第1軸部48の軸心C3まわりの相対的な周方向変位Lを検出する可変抵抗器70と、上記周方向変位Lとその検出点Aの軸心C3からの距離rとに基づいてジョイント角θを算出して出力するジョイント角算出装置72とを備えていることから、上記相対的な周方向変位Lは小型の可変抵抗器70で検出可能となるので、外周側に突き出す部品のための空間が不要となって取り付けの制約が殆ど解消されるとともに、重心の偏心も大幅に小さくなって高速回転となっても誤差が小さく、正確にジョイント角θを測定できる。
(もっと読む)
三次元画像生成装置及び三次元画像生成方法
【課題】安全で測定精度の良い三次元画像を生成する三次元画像生成装置を提供する。
【解決手段】この三次元画像生成装置110は、被検査対象物6に超音波を送信する送信部と被検査対象物6から反射した超音波を受信する受信部とを備えたプローブ1と、プローブ1の三次元位置情報及び姿勢情報を生成するセンサ2と、所定のエリアに磁界ベクトルを形成するトランスミッタ4と、三次元位置情報及び姿勢情報に基づいてプローブ1から取得された反射画像の三次元形状を演算するPC(演算部)12と、演算結果を三次元画像として表示するモニタ(表示部)14と、センサ2からの座標をリアルタイムに演算する位置検出回路10と、プローブ1から得られた反射画像データを処理するイメージプロセッサ11と、を備えて構成されている。
(もっと読む)
シフトレバー装置用シフトポジション検出装置
【課題】二部材の摺動面間に対する異物の噛み込みに起因する二部材間の摺動性の低下を防止する。
【解決手段】シフトポジション検出装置は、シフトレバー装置におけるシフトレバーのシフトポジションを電気的に検出する。シフトレバーの操作に基づいて相対的に摺動し合う摺動面63a,66aを有する二部材53,54を備える。二部材53,54のうちの少なくとも一方の部材53の摺動面63aに、その二部材53,54の摺動面63a,66a間に入り込んだ異物を逃がすための条溝(異物逃がし部)80が設けられる。条溝80が重力方向に延びている。
(もっと読む)
誘導式の位置測定装置または角度測定装置
【課題】本発明の課題は、大きな温度領域で使用でき、機械的な公差と測定オブジェクトの摩耗とに対して耐性を有し、特性曲線が線形である可能な限り大きな位置測定領域または角度測定領域を有する省スペースの位置測定装置または角度測定装置を提供することである。
【解決手段】可動の測定エレメントによるオーバーラップの程度に依存して生成されるインダクタンスの変化に起因してパルス周波数を変化する測定コイルを含む測定発振器である第1の発振器と、測定コイルまたは基準コイルを含む測定発振器または基準発振器である第2の発振器とを有し、基準コイルは、該可動の測定エレメントによって完全にオーバーラップされるかまたは完全にカバーされないことにより定義され、該測定発振器および基準発振器のパルス周波数はデジタルの評価回路においてカウントされる構成。
(もっと読む)
磁界分布測定装置
【課題】測定点と測定位置の確実に対応付け簡易な構成によって容易にかつ確実に立体空間における磁界分布を計測することのできる磁界分布測定装置を提供すること。
【解決手段】磁界分布測定装置100は、任意の立体空間における各地点の磁力を計測するための磁界センサ140に位置センサ110を追加するとともに、当該磁界センサ140と位置センサ110の位置を常に一定に配設したセンサロッド150を有し、各地点を計測しつつ、当該地点の位置を的確に対応付けて記憶し、測定結果を出力するようになっている。
(もっと読む)
センサーにおけるターゲットのローカライゼーション向上方法
【課題】容量センサで標的の位置測定を行う際に、角度要素、面積要素、温度要素の補正を行い精度を向上させる。
【解決手段】複数の電極を含有する容量センサーの出力を収集する工程と、前記出力を組み合わせ、前記センサーから標的物が離れている距離を表すシグナルを得る工程とを有する、センサーにおける標的物の位置を測定する方法に関する。複数データから角度要素、面積要素を同定し補正をかける。また、別途用意した温度補正テーブルを用いtw温度補正をかける。
(もっと読む)
付加ピンに接続した阻止キャパシタを有する電流インタフェース
阻止キャパシタ(128,228)を有する電流インタフェース(100,200)を記載する。阻止キャパシタ(128,228)を付加ピン(115,215)に接続し、内部センサ回路(130,230)の電源電圧リップル除去を可能にする。ダイオード(125)または電圧レギュレータ(226)により、供給ライン(160,260,170,270)をキャパシタ(128,228)から減結合する。したがって、センサ素子(132,232)を電流インタフェース(100,200)とともに使用することは、阻止キャパシタ(128,228)のサイズを限定することはなく、これはすなわち、電流インタフェース(100,200)の出力電流信号におけるエッジの遷移時間が、通常出力電流信号におけるアンペア値測定に用いられる感知抵抗器(171,271)に結合した阻止キャパシタ(128,228)のローパス挙動による影響を受けないからである。  (もっと読む)
(もっと読む)
磁気式位置姿勢センサを用いた手指用モーションキャプチャ装置
【課題】本発明は、手指の繊細な動きを記録・再現するための磁気式位置姿勢センサを用いた手指用モーションキャプチャ装置を提供することを目的とする。
【解決手段】磁気式三次元位置姿勢システム(Liberty 16 system)は、1個のトランスミッタ(Transmitter)と16個のセンサ(sensors)で構成されており、トランスミッタに対するセンサの相対的な位置(X,Y,Z)および角度(Az,El,Ro)を計測することができる。それぞれのセンサは指に装着し易いようにモールドしており、1本の指に3個のセンサを装着できる。片手あたり手掌部の1個を加え計16個のセンサで手指のモーションキャプチャ(MoCap)を構成しており、あらゆる手の動きを計測することができる。また、トランスミッタと手掌部のセンサを固定するグローブは伸縮性のある面ファスナーを巻きつけて装着し、その他のセンサは伸縮性に富むテーピングを用いて装着する構造である。
(もっと読む)
シート形状測定方法と装置
【課題】オフラインで断裁される金属性支持体上に合紙が堆積されているシート形状物のシート形状測定方法において、直角度を簡便に測定する測定方法を提供する。
【解決手段】金属性支持体上に合紙が堆積されているシート形状物のシート形状測定方法において、直線上に2本以上の導電性のガイドピンをスライドガイドとして配置し、かつ該直線に直交する直線上に2本以上の可動性かつ導電性の押当てピンを配置した台上で、該シート形状物を該スライドガイドに沿わせてスライドさせ、該可動性押当てピンに接触させて、該ガイドピンと押当てピンの全てのピンで電気的導通が取れたときの可動性押当てピンの移動量から直角度を検出することを特徴とするシート形状測定方法。
(もっと読む)
超小型絶対位置センサを用いたハンドインターフェースグローブ及びこれを用いたハンドインターフェースシステム
【課題】超小型絶対位置センサを用いて指関節の絶対位置を測定した信号を用いて仮想空間の仮想ハンドモデルを制御し仮想空間の客体と相互作用できるようにして現実空間の使用者の手動きを精密で正確に仮想空間の仮想のハンドモデルの動きと自然に一致されるように現実空間と一致度の高い自然な手の動きおよび視覚的一致感を支援するグローブ及びこれを使用したシステムを提供する。
【解決手段】指関節の絶対位置を測定する超小型絶対位置センサを用いて指関節の微素変位を測定し、測定された指関節の動きを用いて仮想のハンドモデルの動きを制御し仮想環境の客体と相互作用して、使用者の体形の大きさによって異なる変化距離の補正を簡単な2つの動作にてできるようにして仮想の製品品評などの高品質の仮想現実技術に接し、実際と類似に製品の品評過程を模擬して製品の欠陥と誤謬を事前に検出でき、全体的に製品の生産過程及び設計過程を短縮させる効果がある。
(もっと読む)
シート状部材のワイヤ角度算出方法及びその装置
【課題】 シート状部材を切断しながらワイヤの切断角度を正確に算出することのできるシート状部材のワイヤ角度算出方法及びその装置を提供する。
【解決手段】 シート状部材400のワイヤによる磁気の変化を検出装置120A,120Bによって検出し、検出した磁気が変化したときの検出装置120A,120Bの位置に基づいてシート状部材400の幅方向両端のワイヤの位置e1,e2をそれぞれ検出するとともに、シート状部材の幅方向両端のワイヤの検出位置間の距離LAを算出し、カッター230からワイヤの長手方向に所定距離だけ離れた位置の磁気を磁気抵抗検出器によって検出し、検出した磁気が変化したときのカッター230の位置に基づいてシート状部材400の幅方向両端のワイヤの位置e1,e2をそれぞれ検出するとともに、シート状部材400の幅方向両端のワイヤの検出位置間の距離LBを算出し、算出距離LAと算出距離LBに基づいて切断方向に対するワイヤの角度を算出する。
(もっと読む)
複数の回転式に構成された磁気センサを利用した角位置検出
磁気的センシング方法およびシステムはその中央位置を備えたダイを含む。一群の磁気抵抗式ブリッジ回路がそのダイの上に配置され構成される。次いで、磁気バイアス素子が、その複数のブリッジ出力信号を発生させるために、複数の磁気抵抗式ブリッジ回路をダイの中央部分の軸の周りを回転する磁界でバイアスするように使用される。最後に、その位置データを決定するために複数のブリッジ出力信号が処理される。  (もっと読む)
(もっと読む)
角度を決定する方法
それぞれ、出力信号U1=U0sin(2α)、U2=U0cos(2α)を供給する2つのフルブリッジを伴う磁気抵抗センサに対する外部磁界の角度を決定する方法を提供するために、角度決定は、単純な電子部品を利用することによって実行され、角度αは、α=1/2*((U1/(|U1|+|U2|))−1)*sgn(U2)という関係を利用したアナログ方法によって決定されることが提案される。  (もっと読む)
(もっと読む)
旋回角度センサを備えたボールジョイント
本発明は、ジョイントケーシング(4)とボールピボット(3)との相対角度位置を検出するための旋回角度センサ(9)を備えたボールジョイント(1)に関する。この場合、ジョイントボール(2)の旋回角度αは、磁石(8)と磁界センサ(9)とを有する測定装置によって検出される。
本発明によれば、1シリーズの各ボールジョイント型式のために、ボールジョイント(1)がそれぞれ定格旋回角度(αm)に達した時に、磁界センサ(9)を通過する磁界(12)の角度(k)が前記シリーズのための定数(km)に一致するように、磁石(8)の位置及び大きさ、並びにジョイントボール(2)の切欠の大きさ及び位置が選定されている。
これによって、前記ボールジョイントシリーズ内ですべての型式をカバーできるように、ほぼ同じ磁界センサ(9)が使用され、またすべての型式をカバーできるように同じセンサケーシング(7)内に、並びにボールジョイント(1)の同じ箇所に配置することができる。これによって得られた部品の多様性、及びボールジョイントシリーズの構造的な簡単さに基づいて、特に相当なコストの削減が得られる。  (もっと読む)
(もっと読む)
1 - 18 / 18
[ Back to top ]