
Fターム[2F063BA04]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 測定対象物の種類 (1,844) | プロペラ、スクリュー、タービン羽根 (23)
Fターム[2F063BA04]に分類される特許
1 - 20 / 23
壁厚検査方法、タービン翼、校正用具および渦電流検出システム
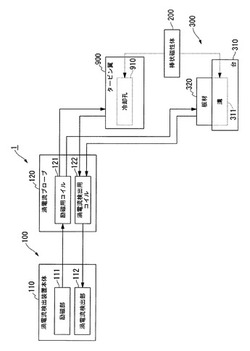
【課題】タービン翼に設けられた孔の位置の検査をより簡単に行えるようにする。
【解決手段】タービン翼900の冷却孔910に棒状磁性体200を挿入して、タービン翼900の表面から渦電流プローブの走査を施して渦電流検出を行う渦電流検出工程の前に、棒状磁性体200を溝に挿入してタービン翼900の壁厚判定基準厚みを有する板材320を介して棒状磁性体200に対して渦電流検出を行うことにより、渦電流プローブ120の校正を行う。これにより、検査者は、渦電流検出を行って容易な判定を行うことで、冷却孔910の位置の検査をより簡単に行うことができる。
(もっと読む)
回転部品の動作を監視する際に使用するためのシステムおよび方法

【課題】ロータアセンブリの動作を監視する際に使用するためのシステムを提供する。
【解決手段】ロックワイヤタブ220の表面242、252間の距離を測定するように構成された少なくとも第1の隙間センサ240、250を含む複数の隙間センサと、複数の隙間センサに接続された監視ユニットとを含み、監視ユニットは、複数の隙間センサ240、250からの測定値を受信し、受信された測定値に基づいてロータアセンブリに亀裂が存在するかどうかを判定するように構成されている。
(もっと読む)
膜厚測定装置及び膜厚測定方法
【課題】被測定対象に施される遮熱コーティングの膜厚を効率良く正確に測定することが可能な膜厚測定装置及び膜厚測定方法を提供することを目的とする。
【解決手段】膜厚測定装置1は、タービン翼11に形成された遮熱コーティング膜の膜厚を測定するECTセンサ4と、遮熱コーティング膜の膜厚を測定する地点であるタービン翼11上の測定地点を記憶している記憶手段9と、タービン翼11の形状を測定するレーザ変位計5と、レーザ変位計5によって測定された測定されたタービン翼11の形状と、記憶手段9に記憶されているタービン翼11上の測定地点に基づいて、ECTセンサ4による実際の膜厚測定に適した実測定地点を算出する測定位置算出手段8と、測定位置算出手段8によって算出された実測定地点に基づいて、ECTセンサ4を駆動して、ECTセンサ4の測定位置を調整するアーム駆動手段6とを備える。
(もっと読む)
センサ組立体およびセンサ組立体において用いるマイクロ波放射器
【課題】機械のコンポーネントの振動および位置を検出するためのセンサ組立体を提供する。
【解決手段】マイクロ波センサ組立体110において用いるマイクロ波プローブ202は、放射器本体と、放射器本体に結合される放射器とを含む。放射器は、第1の部分と、第2の部分と、第1の部分を第2の部分に結合する接続部分とを含む。少なくとも1つのマイクロ波信号が受信されると、第1の部分および第2の部分は電磁場224を生成し、物体が電磁場の中に配置されると、放射器に負荷が誘起される。
(もっと読む)
動的自動利得制御機能を有するセンサインタフェースの方法及びシステム
【課題】動的自動利得制御機能を有するセンサインタフェースの方法等を提供する。
【解決手段】所与のターゲットの速度範囲全体にわたって入力信号の真の正ピーク及び負ピークが維持されるように信号調整処理を動的に調節することにより、低速時の信号対ノイズ比を高め、高速時のクリッピングや歪みを防ぐことが可能な磁気センサインタフェースを提供する。センサから交流差動電圧信号を受信するステップを含む。交流差動電圧信号の振幅は、時間とともに変化する。交流差動電圧信号は、動的スケーリングが可能な減衰済みシングルエンデッド電圧信号に変換される。減衰済みシングルエンデッド電圧信号にスケーリング係数を乗じることにより、減衰済みシングルエンデッド電圧信号をスケーリングすることが可能である。スケーリング係数は、スケーリングされた減衰済みシングルエンデッド電圧信号の信号対ノイズ比を最大化するように選択される。
(もっと読む)
回転検出装置
【課題】磁気センサでは困難な、高速な回転の検出に好適な回転検出装置を提供する。また同時に、耐環境性に優れ、低コストな装置とする。
【解決手段】本発明の回転検出装置は、ターゲット1との対向距離に反応するインダクタンス(又はキャパシタンスも可)を含む回路の共振周波数に基づく周波数の第1信号を発生する第1信号発生器9、及び、基準となる周波数の第2信号を発生する第2信号発生器10を具備し、第1信号発生器9には電圧制御発振器2が含まれている。位相同期回路12は、第1信号及び第2信号について、位相及び周波数が相互に一致するように、電圧制御発振器2に制御電圧を付与する。出力回路8は、制御電圧が変化している時期を捉えた矩形波信号、すなわち、ターゲットの凹部又は凸部に対応した信号を出力する。
(もっと読む)
結合同調回路を使用して2つの物体の相対位置を検知する電磁方法
セラミック金属インターロック部品並びにその製造及び使用方法
【課題】セラミック金属インターロック部品並びにその製造及び使用方法を提供すること。
【解決手段】複合素子が提供される。複合素子は、第1の端部及び第2の端部を有するキャビティを画成するセラミック部品と、ヘッド及び本体を含む金属部品とを含む。金属部品の本体の少なくとも一部がキャビティ内に配置され、金属部品のヘッドが、キャビティの第1の端部上に配置される。本体の一部の断面積は第1の端部の面積よりも大きい。加えて、セラミック部品と金属部品がインターロックされる。複合素子を製造する方法及びクリアランスセンサ部品を製造する方法も提供される。
(もっと読む)
センサパラメータダウンロードによるセンサの自動較正
【課題】回転機械の静止部品と回転部品との間のクリアランスを測定するセンサシステムにおいて、センサ変動が存在しても、手動較正を必要とせずに、所望の較正結果を得るための方法又はシステムを提供する。
【解決手段】クリアランス測定信号を出力するクリアランスセンサ24を備える。本クリアランスセンサ24には、第1のセンサ情報を記憶するセンサメモリが接続される。また、第2のセンサ情報がエレクトロニクスインターフェースメモリに記憶される。エレクトロニクスインターフェースで第1及び第2のセンサ情報を読み取り、それらに基づいて、クリアランスセンサとそれぞれ複数の較正データとを適合させる。
(もっと読む)
2物体間の間隔を推定するシステムおよび方法
【課題】2物体間の間隔を推定するシステムおよび方法を提供すること。
【解決手段】回転機械(10)内の間隔推定用処理システム(12)は、1つまたは複数のセンサ(14、16、18)と、推定間隔(46)を算出する1つまたは複数のデジタル信号プロセッサ(32、40)とを備えている。処理システム(12)は、リアルタイム間隔推定値を得るための技術、および平均化した間隔推定値を得るための技術を含むことができる。処理システム(12)の態様はまた、回転機械(10)の動作状態によって、リアルタイム間隔推定値および平均化間隔推定値を切り換える方法を含むことができる。
(もっと読む)
対象物の周期的位置を検知するためのシステムおよび方法
1または複数の対象物たとえばタービンの回転ブレードの周期的位置を検知するためのシステムおよび方法。システムは受動渦電流検知ユニットを備え、受動渦電流検知ユニットは、1または複数の磁石と第1および第2のコイルがそれぞれ巻かれた第1および第2のコアとを有し、これらは共に第1および第2の磁界を発生させる。検知ユニットの位置は、対象物が第1および第2の磁界を周期的に連続して通過し、その結果、第1および第2のコイルが第1および第2の出力信号をそれぞれ生成するように定める。各コイルは別個に処理回路構成に接続され、処理回路構成は第1および第2の出力信号をそれぞれ受け取る。回路構成は、第1および第2の出力信号を電子的に組み合わせて、同相信号が電子的に互いに差し引き合い、回路構成の出力から、第1および第2の出力信号中に存在する任意の電磁妨害ノイズが取り除かれるようにする。 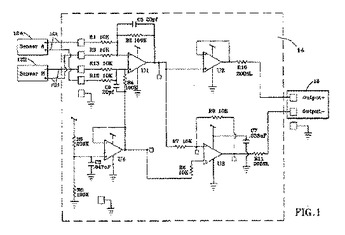 (もっと読む)
(もっと読む)
受動渦電流センサ用高温エレクトロニクス
1または複数の対象物たとえばガス・タービンの回転ブレードの周期的接近を検知するためのシステムおよび方法。システムは、受動渦電流検知ユニットであって、第1および第2の磁界を生成および検出するために結合された第1および第2の磁石と第1および第2のコイル巻コアとを有する受動渦電流検知ユニットを備える。検知ユニットは対象物に対して、第1および第2のコイル巻コアが、第1および第2の磁界を周期的に通過する対象物に応答してそれぞれ出力を生成するように、位置する。回路構成が、第1および第2のコイル巻コアの出力を電子的に組み合わせて、対象物が第1および第2の磁界を周期的に通過するときの接近およびタイミングに対応する出力信号を生成する。第1および第2のコイル巻コアの出力中に存在する電磁妨害ノイズが、回路構成の出力信号から取り除かれる。 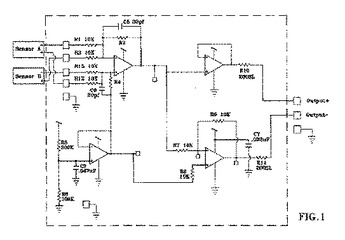 (もっと読む)
(もっと読む)
タービン機械、すきま測定システムおよびロータのすきまを判定する方法
本発明はロータブレード12を含むロータ10と、ロータのすきまdを形成する、少なくとも部分的にロータ10またはロータブレード12を囲むロータハウジング16と、ロータのすきまdを特徴づけている測定容量値Cを測定するための、電極および対電極を有する容量型センサ・デバイス20に接続されるすきま測定システム18とからなるタービン機械に関し、ロータ10またはロータブレード12は、センサ・デバイス20の電極として接続され、ロータハウジング16の少なくとも部分22は対電極として接続される。本発明は、すきま測定システム18と、タービン機械のロータブレード12を含むロータ19と、少なくとも部分的にタービン機械のロータ10またはロータブレード12を囲むロータハウジング16との間の、ロータのすきまdを測定する方法にも関する。 (もっと読む)
スクリューフィーダーの異常検出方法。
【課題】スクリューフィーダーのスクリュー翼とスクリューケースとの間隔を正確に把握し、スクリューフィーダーの異常を確実に検出する方法を提供することにある。
【解決手段】スクリューフィーダーの内部にスクリュー翼を有する部位のスクリューケースの外周部に渦電流センサを設け、スクリュー翼とスクリューケース内面との間隔を測定し、異常を検出することを特徴とする、すなわちスクリュー翼とスクリューケースとの間隔を直接、非接触で測定することによって、スクリュー翼等の異常によるスクリュー翼とスクリューケースの異常接近を確実に検出することができる。
(もっと読む)
攪拌乾燥機の異常検出方法。
【課題】攪拌乾燥機の攪拌羽根と乾燥機胴体との間隔を正確に把握し、攪拌乾燥機の異常を確実に検出する方法を提供することにある。
【解決手段】内部に攪拌羽根を有する攪拌乾燥機の乾燥機胴体の外周部に渦電流センサを設け、攪拌羽根と乾燥機胴体との間隔を測定し、異常を検出することを特徴とする、すなわち攪拌羽根と乾燥機胴体との間隔を直接、非接触で測定することによって、攪拌軸や攪拌羽根等の異常による攪拌羽根と乾燥機胴体の異常接近を確実に検出することができる。
(もっと読む)
マルチセンサ間隙プローブ
【課題】ブレード先端間隙を測定する方法及び能動間隙制御の方法を提供する。
【解決手段】縦方向及び横方向に配置した第1及び第2のセンサ2、3を備えたマルチセンサ間隙プローブ1は、センサと縦方向に配置した回転ロータ30との間の第1及び第2の距離D1、D2を測定するように作動する。センサは、半径方向外側タービンブレード先端82とブレード先端を囲む環状ステータシュラウド72との間のブレード先端間隙を測定するように作動する。ブレード先端は、スキーラ先端とすることができ、センサは、センサとスキーラ先端壁129の頂部137及びスキーラ先端の空洞内の外向きに向いた壁131との間の距離を測定するように作動可能である。プローブは、制御装置に作動可能に接続して第1及び第2の距離を示す信号を送信して、能動間隙制御に使用する空気弁を制御する。プローブの2つ又はそれ以上を使用して、ロータ中心線オフセットを判定する。
(もっと読む)
間隔測定についてのシステムおよびそのシステムの操作方法
【課題】間隔検出システム(110)を提供する。
【解決手段】システム(110)は可変距離d(116)によって検査対象(114)から離間されたプローブ(112)を含む。システム(110)はまたプローブ(112)を介して電流を供給するための交流(AC)電源(118)も含み、AC電源(118)およびプローブ(112)はプローブ(112)の先端と検査対象(114)の間に制御されたプラズマチャネル(120)を生成するように構成される。システム(110)はさらに、プローブ(112)の先端と検査対象(114)の間の電圧差に基づき可変距離d(116)を決定するように構成された処理ユニット(124)を含む。
(もっと読む)
渦電流式非磁性金属膜厚測定方法及びそれを実施するための渦電流式非磁性金属膜厚測定装置
【課題】本発明は、リフトオフ時の板厚の測定精度をさらに向上することができる渦電流式非磁性金属膜厚測定方法及びそれを実施するための渦電流式非磁性金属膜厚測定装置を提供することにある。
【解決手段】本発明は、渦電流測定センサ4を非磁性金属と同じ仕様の較正試験体上に設置して渦電流測定センサ4へ供給する励磁電流の周波数を各較正試験体に適する値に選定する工程と、選定された周波数に基づいて励磁電流の位相角を調整して較正試験体上に設置された渦電流測定センサ4から出力される虚数部分の変動率が小さくなる位相角を選定する工程と、これら工程によって決められた周波数と位相角に基づいて非磁性金属の膜厚を測定する工程とを有するものである。
(もっと読む)
複数先端クリアランス測定システムおよび操作方法
【課題】一つ先端エラーおよび変動を検出して、修正することによって、2つの部品の間のクリアランスの正確な測定を提供する複数先端クリアランス測定システムを提供することにある。
【解決手段】複数先端クリアランス測定システム(12)が開示されている。本複数先端クリアランス測定システム(12)は、第1の対象物(24)に配置され、該センサが第2の対象物(26)に対応する検出されたパラメータを表示する信号を生成するように構成される複数のプローブ先端部(62、64、66、68)を含むセンサ(28)と、異常値プローブ先端部を検出して、それぞれの異常値プローブ先端部のゲインまたはオフセットを調整するためにプローブ先端部(62、64、66、68)から検出されたパラメータのサブセットから信号を評価し、該信号に基づき第1の対象物(24)と第2の対象物(26)との間のクリアランスを測定するように構成される処理装置(34)とを含む。
(もっと読む)
マルチレンジ間隙測定システム及びそれを動作させる方法
【課題】静止物体(44)と可動物体(42)との間の間隙を測定するためのシステム(12)を提供する。
【解決手段】本システム(12)は、静止物体(44)上に配置されるように構成されかつ可動物体(42)に対応する作動パラメータを測定するように構成された少なくとも1つのセンサ(58)と、少なくとも1つのセンサ(58)に結合されたコントローラ(64)とを含み、コントローラ(64)は、測定した作動パラメータに基づいてセンサ(58)の動作モードを制御するように構成される。
(もっと読む)
1 - 20 / 23
[ Back to top ]