
Fターム[2F063BA08]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 測定対象物の種類 (1,844) | ステアリングホイール、ハンドル (281)
Fターム[2F063BA08]に分類される特許
1 - 20 / 281
回転角度検出装置
回転角度検出装置
回転角度検出装置
磁界角計測装置およびそれを用いた回転機
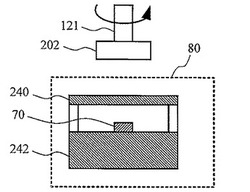
【課題】磁束発生体が高速に回転する場合であっても、磁束発生体または磁気センサの近傍に非磁性の導体(導電体)を配置した構成を用いて精度良く磁界角または回転角を計測すること。
【解決手段】磁界方向に感応する磁気センサ70と、非磁性の第1の導体240と、非磁性の第2の導体242とを備えた磁界角計測装置であって、前記磁気センサは、前記第1の導体と前記第2の導体との間に配置され、前記第1の導体中の渦電流が前記磁気センサに及ぼす磁界と、前記第2の導体中の渦電流が前記磁気センサに及ぼす磁界とが、互いに打ち消しあう構成とする。
(もっと読む)
油圧パワーステアリング装置

【課題】操舵補助装置に供給される作動油の量を正確に制御することに貢献する油圧パワーステアリング装置を提供する。
【解決手段】油圧パワーステアリング装置1は、パワーシリンダー20と、パワーシリンダー20に供給される作動油の流れを制御するロータリーバルブ70(以下、「バルブ70」)と、バルブ70を駆動する電動モーター50と、電動ポンプ24とバルブ70とを接続するポンプ吐出油路92と、パワーシリンダー20とバルブ70とを接続する各供給油路93,94と、電動モーター50を制御する制御部30とを有する。油圧パワーステアリング装置1は、シャフト42の回転角度を検出する回転角センサ60を有し、バルブ70は、電動モーター50のシャフト42と一体的に回転する弁体と、各油路92〜94と接続される空間を内部に有するハウジングとを有し、制御部30は、電動モーター50の制御に回転角センサ60の出力を反映する。
(もっと読む)
回転角検出装置、及びトルクセンサ
【課題】回転体の多回転の絶対回転角を検出することが可能でありながらも、構造の簡素化を図ることのできるトルクセンサを提供する。
【解決手段】このトルクセンサ14では、第1のレゾルバ40を通じて検出されるインプットシャフト20の回転角度と、第2のレゾルバ50を通じて検出されるロアシャフト21の回転角度との差分値に基づいてステアリングホイールに付与された操舵トルクを演算する。ここでは、インプットシャフト20と一体となって回転する太陽歯車61、磁性体により形成されて太陽歯車61の周囲を公転する遊星歯車63、及び遊星歯車63が噛合される内歯車62により構成される遊星歯車機構60を設ける。そして、第1のレゾルバ40から出力される電圧信号に基づいてインプットシャフト20の回転角及び遊星歯車63の位置を検出し、それらに基づいてステアリングホイールの操舵角を求める。
(もっと読む)
センサ装置
【課題】回転軸に付与されるトルク、及び回転軸の回転角を検出する場合であれ、回転軸の軸方向において小型化を図ることのできるセンサ装置を提供する。
【解決手段】このセンサ装置14は、トーションバー22を介して互いに連結されたインプットシャフト20及びロアシャフト21に沿って配置されてインプットシャフト20に付与されるトルクを検出するトルクセンサ40と、各シャフト20,21の径方向におけるトルクセンサ40の外周に近接して配置される回転角センサ50とを備える。この回転角センサ50は、ロアシャフト21の回転に基づいて回転する検出ギア52と、検出ギア52の回転角を検出する部分であるセンサ本体51とを備える。そして、回転角センサ50は、センサ本体51を通じて検出される検出ギア52の回転角に基づきロアシャフト21の回転角を検出する。
(もっと読む)
回転角度検出装置及びこれを用いた回転角度検出システム
【課題】主に自動車のステアリングの回転角度検出等に用いられる回転角度検出装置、及びこれを用いた回転角度検出システムに関し、簡易な構成で、確実な回転角度の検出が可能なものを提供することを目的とする。
【解決手段】回転角度検出装置13と13Aの制御手段12と12Aが、算出した回転角度を各々異なる所定時間後に出力すると共に、これらを接続し、他からの回転角度を検知した場合には、回転角度を出力しないように形成することによって、複数の回転角度検出装置13や13Aを用いた場合でも、車両の電子回路11には一つの回転角度の信号しか入力されないため、電子回路11の負荷が少なくなると共に、万が一、一方に故障等が生じた場合でも、他方からは回転角度が出力されるため、簡易な構成で、確実な回転角度の検出が可能なものを得ることができる。
(もっと読む)
ステアリング装置
【課題】摩耗現象を最小限にし、スペースを節約して二輪車に組み込むことのできる、操舵角センサを備えるステアリング装置を提案する。
【解決手段】二輪車のためのステアリング装置は、ステアリングシャフト5を案内するフレーム6を備え、フレーム6に開口部が形成され、当該開口部の領域に角度センサ4が配置されており、フレーム6の開口部の領域において、角度センサ3に対応した可動部材がステアリングシャフト5に配置されており、角度センサ3と可動部材とは、相互に非接触に配置されている。
(もっと読む)
変位検出装置、車両用操舵装置及びモータ
【課題】検出精度を低下させることなく、装置全体としての回路規模をより縮小することができる変位検出装置、車両用操舵装置及びモータ。
【解決手段】モータ回転角センサ16は、複数のホール素子HA〜HCと、これら複数のホール素子HA〜HCを動作させるための電力供給をそれぞれ遮断可能な複数のスイッチSWA〜SWCとを備える。
(もっと読む)
回転情報算出装置、ステアリング装置、電動パワーステアリング装置、センサ付き軸受装置、車両、異常検出装置、回転情報算出方法及び異常検出方法
【課題】3相の磁気検出器の磁気検出信号の異常を検出することが可能であり、異常発生後も、3相中の2相の磁気検出信号が正常な場合に、継続して回転情報の計算を正確に行うことが可能な回転情報算出装置を提供する。
【解決手段】3相の磁気検出信号のサンプリング値a、b、cを取得し、取得したサンプリング値に基づいて、各相に対する回転角度位置を算出する。そして、これら算出した回転角度位置に基づき各相のサンプリング値の異常を検出するとともに、1相のサンプリング値のみに異常が検出されたときは、異常検出フラグを出力すると共に残りの2相のサンプリング値で回転角度位置の算出を行う。2相以上のサンプリング値の異常が検出されたときは、回転情報算出装置の動作を停止する。また、正常な相のサンプリング値に基づいて算出した回転角度位置の平均値を出力用の回転角度位置として算出する。
(もっと読む)
相対角度検出装置、電動パワーステアリング装置および電線保持具
【課題】ハウジング外において電線に力が作用したとしても、電線保持部材における電線保持部、およびハウジング内の電線の端部に大きな力が及ばないようにすることを、簡易な構成で実現できる技術を提供する。
【解決手段】相対角度センサから出力される電気信号をハウジング外に配置される装置に伝送する電線310と、ハウジングに形成された連通孔に嵌合されるとともに電線310を保持するグロメット320と、ハウジングの外側にて連通孔を覆う覆い部を有し、グロメット320が保持した電線310を通す電線孔が覆い部に形成されたプレート330と、ハウジングの外側にて電線310を狭持するクリップ340と、を備え、プレート330には、覆い部の外側にクリップ340が連結される連結孔が形成されており、クリップ340は、電線310の周囲に巻かれることで電線310を狭持する帯部と、プレート330の連結孔に連結されるフック部とを有する。
(もっと読む)
主幹制御器
【課題】主幹制御器の操作部及び制御部間の接続距離を延長できるようにして、制御部を運転室以外の場所へ収納し運転室収納機器のスペースを確保するとともに、角度検出器の出力信号数を削減することで、車両艤装線数を削減することができる主幹制御器を提供する。
【解決手段】主幹制御器1は、ノッチ指令を操作するハンドル11の角度を検出するために角度検出器15を用いた操作部10とその制御部20とが分離された、鉄道車両用の主幹制御器である。この主幹制御器において、操作部の角度検出器出力を差動出力のシリアル信号とした。
(もっと読む)
操舵角センサ
【課題】環状駆動ギヤの真円度によって、第1の従動ギヤ及び第2の従動ギヤに生じる回転角度の誤差の影響が小さくされて、ステアリングホイールの回転角度情報を精度良く生成することができる操舵角センサを提供する。
【解決手段】ステアリングホイールの回転に伴って回転する環状駆動ギヤ21と、それぞれマグネットが設けられて前記環状駆動ギヤ21の回転に応じて従動回転する第1の従動ギヤ25及び第2の従動ギヤ27と、を備え、前記第1の従動ギヤ25及び前記第2の従動ギヤ27の回転に基づく磁界の変化により前記ステアリングホイールの回転角度情報を生成するための操舵角センサにおいて、前記環状駆動ギヤ21と、前記第1の従動ギヤ25及び前記第2の従動ギヤ27と、の間に、それぞれのギヤ25、27と噛み合う中間ギヤ23を介在させる。
(もっと読む)
車両用制御装置
【課題】この発明は、車輪速から操舵角を推定することができ、舵角検出手段を搭載していない車両でも操舵角を推定して、操舵角情報を必要とする全ての制御を実行することが可能な車両用制御装置を実現することを目的とする。
【解決手段】この発明は、左車輪速を検出する左車輪速検出手段と、右車輪速を検出する右車輪速検出手段と、左車輪速と右車輪速とから左右輪回転差を算出する左右輪差算出手段と、左車輪速と右車輪速とから車速を算出する車速算出手段と、左右輪回転差と車速とに基づいて推定操舵角を演算する推定操舵角演算手段と、推定操舵角を更新するかどうかを判定する推定操舵角更新判定手段とを備えた推定操舵角計算手段を設けることを特徴とする。
(もっと読む)
回転角およびトルクのセンサ
【解決手段】 回転角およびトルクのセンサは、シャフト部分(1、2)と共に回転しないように接続されている2つの歯車(4、5)を備え、これら2つの歯車は、歯車(6、7)と噛合する。一方の歯車(7)には、単極磁石または多極磁石(12、13)が取着されている。他方の歯車(6)には、極の数に合った複数の磁束誘導部(17、18)が取着されており、L字形状を持つ。磁束誘導部(17、18)の一方の足部は、多極磁石(12、13)の方向を向き、他方の足部は、歯車(6)に平行に延伸し、一方の足部は歯車(6)の一方の側にあり、他方の足部は歯車(6)の他方の側にあり、これらの足部の間には、歯車(6)内に配されている第2のセンサ(16)が配されている。 (もっと読む)
回転角計測装置,制御装置およびそれらを用いた回転機システム
【課題】磁束発生体が高速に回転する場合であっても、磁束発生体または磁気センサの近傍に非磁性の導体(導電体)を配置した構成を用いて精度良く磁界角または回転角を計測すること。
【解決手段】磁界方向に感応する磁気センサ70と、前記磁気センサからの出力が入力される検出部302と、を備えた回転角計測装置であって、前記回転角計測装置は、磁束発生体202を備えた回転体121とともに用いられるものであり、前記磁気センサの出力は、前記磁界方向に対応した原角度信号セット155であり、前記検出部は、前記回転体の回転速度を引数とする補正関数が出力する補正値を用いて前記磁気センサの近傍に配置された非磁性の導体の影響を補正した補正角度を出力する。
(もっと読む)
回転角検出装置、および、これを用いた電動パワーステアリング装置
【課題】高精度に被検出部の回転角度を検出可能な回転角検出装置、および、これを用いた電動パワーステアリング装置を提供する。
【解決手段】回転角検出装置10のブリッジ回路部11、12は、被検出部の回転角度に応じてインピーダンスが変化するセンサ素子21〜28により構成される複数のハーフブリッジ14〜17を有する。制御部51は、複数のハーフブリッジから出力される出力信号を取得し、位相ずれαを補正するための位相補正値φを出力信号の組合せ毎に算出し、メモリ部52に記憶する。制御部51は、出力信号の一部に異常が生じた場合でも、異常が生じていない出力信号の組合せに対応した位相補正値φに基づき、補正前回転角度θを補正する。これにより、位相補正値φに基づいて補正前回転角度θを補正するので、センサ素子の実装ずれ等があっても、高精度に被検出部の回転角度δを算出することができる。
(もっと読む)
演算装置、相対移動量測定装置、および、演算方法
【課題】位相の異なる1対の入力信号から出力を得る演算においては、arctan等の複雑な演算が必要となり、演算回路の負荷が大きくなってしまう。また、演算回路の負荷を軽減するためにルックアップテーブルを参照して出力を得る場合、必要なメモリが大きくなってしまう。
【解決手段】位相の異なる1対の入力信号IN1、入力信号IN2に対して、関数Fを用いて、入力値XをX=F(IN1、IN2)と定義する。入力値Xと出力値Yの関係を慨ね線形となるように関数Fを定義することにより、複雑な演算を使用することなく入力信号から予想される出力値を得ることが可能となる。ルックアップテーブルを参照する場合は、出力値と予想される出力値との差分のみをテーブル化しておくことにより、メモリを削減可能となる。
(もっと読む)
相対角度検出装置および電動パワーステアリング装置
【課題】ハウジング内の電線の端部に大きな力が及ばないようにすることを簡易な構成で実現する技術を提供する。
【解決手段】内外を連通する連通孔161が形成されたハウジング140内に収納され、2つの回転軸の相対回転角度に応じた電気信号を出力する相対角度センサ30と、センサ30から出力される電気信号をハウジング140外の電子制御ユニット200に伝送する電線310と、連通孔161に嵌合されて電線310を保持するグロメット320と、連通孔161におけるグロメット320よりも外側の部位に配置されるソケット330と、を備え、ソケット330は、連通孔161の孔方向と交差する方向に分割可能な下側部材340および上側部材331を有し、下側部材340および上側部材331の内部に電線310を通すとともに下側部材340および上側部材331で押圧することでハウジング140外の電線310の向きを孔方向と交差する方向に変更する。
(もっと読む)
1 - 20 / 281
[ Back to top ]