
Fターム[2F063BA15]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 測定対象物の種類 (1,844) | 道路、トンネル (15)
Fターム[2F063BA15]に分類される特許
1 - 15 / 15
トンネル掘進システム、水平方向測定方法
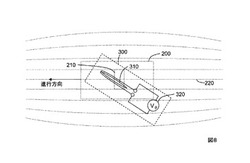
【課題】トンネル掘進機の水平方向を測定できるようにする。
【解決手段】本発明の水平方向測定方法は、非開削で地中を掘削するトンネル掘進機の水平方向を地上で測定する。水平方向測定方法では、トンネル掘進機の先導体内に、当該先導体の進行方向に対してあらかじめ定めた角度だけ異なる水平方向に磁力線が向くように磁界を発生させる発信部を取り付けておく。そして、地上で、磁界測定ステップと水平方向検出ステップを行う。磁界測定ステップは、磁力線を検出する受信コイルの鎖交面の法線方向を水平に維持して、鎖交面の法線方向が変化するように回転させながら、受信コイルに生じる電圧を測定する。水平方向検出ステップは、測定した電圧が最小となるときの鎖交面の法線方向に垂直な水平方向に対して前記あらかじめ定めた角度だけ異なる水平方向を検出する。
(もっと読む)
載荷試験方法、及び損傷検知方法

【課題】簡易な構成で歪み箇所を検出でき、しかも所要の歪み量にも対応できる歪み検出の技術を利用した載荷試験方法、及び損傷検知方法を提供する。
【解決手段】柱状の試験体の特性を試験するために当該試験体を圧縮・引張する載荷試験方法である。導電性ゴムからなる歪み検出部の周縁に対し互いに距離をあけて3個以上の電極を設け、各電極間の電気抵抗を個別に測定することで、上記歪み検出部における変形位置を特定する歪み検出装置を使用する。上記歪み検出部を上記試験体22の表面に沿って配置し、各電極間の電気抵抗を検出することで、上記試験体の面歪みを検出する。
(もっと読む)
路面のひずみ測定装置
【課題】車輪の接地領域で損傷を受け難い構造で、路面に発生するひずみ分布を精度よく測定することができるひずみ測定装置を提供する。
【解決手段】ひずみ測定装置1はセンサ部6を有する。センサ部6は、フレキシブル基板2の裏面に、抵抗式ひずみゲージ3(またはひずみ受感部)を固着したゲージベース4を固着し、フレキシブル基板2の表面にシート状絶縁部材5を固着することで構成される。フレキシブル基板2には、各抵抗式ひずみゲージ3のひずみ受感部の両端部の導線接続部(タブ)14a,14bのうちの導線接続部14aに導通する薄膜状導体18と、導線接続部14bに導通する薄膜状導体19,20とが設けられている。ひずみゲージ3が路面のうちの車輪の接地領域に位置し、薄膜状導体18,19,20の端部18b,19b,20bが接地領域から車輪の幅方向で逸脱する領域に位置するようにセンサ部6のゲージベース4が路面に固着される。
(もっと読む)
路上等の水深測定器
【課題】 真上以外の位置や離れた位置からの識別を可能とする。
【解決手段】 基体10に脚部2を設けた本体部3に、前記脚部2の底面当接位置により定まる仮想路上面Xからの下端高さHを違える複数本の電極軸4と、該電極軸4の下端よりも下方に延在し、かつ前記電極軸4との間が路上面GL上の水Wにより導通する1本以上の導電軸5と、各電極軸4に接続されるパイロットランプ6と、前記導通する電極軸4に接続するパイロットランプ6のみを発光させる制御手段7とを設ける。
(もっと読む)
リンク型変位計の測定方法およびリンク型変位計の測定装置
【課題】トンネルの築造やシ−ルドトンネルの拡幅に好適で、リンク型変位計ユニットを継ぎ足しながら、移動体の位置を合理的かつ迅速に計測する、リンク型変位計の新規な計測法を提供する。
【解決手段】変位センサ26,27を内蔵した一対のリンク22,23の一端部を互いに異軸方向に回動可能に連結したリンク型変位計ユニット21を設ける。前記変位計ユニット21を所定数連結して計測域に配置する。 前記各変位センサ26,27の信号を制御装置31に入力する。前記制御装置31を介して前記信号を演算処理するリンク型変位計の測定方法である。前記計測域を移動する移動体9にリンク型変位計ユニット21を同動可能に装着する。前記移動体9の移動位置に応じて、前記移動体9と計測基準位置との間に一または複数のリンク型変位計ユニット21を接続する。前記変位計ユニット21の変位センサ信号と計測基準位置を基に、移動体9の移動位置を演算する。
(もっと読む)
変位、歪および力センサ
変位、歪、および/または、力センサアセンブリ(10、110)は、X軸に沿った変位、歪、および/または、力の測定を促進する異方性剛性を有する一方で、望まれないYおよびZ軸に沿った変位、歪、および/または、力およびX、YおよびZ軸の回りの回転に起因するエラーが抑制する搭載構造(12)を有する。X軸に沿った軸方向の変位に応答するように構成されている台座(30、130)は、搭載構造(12)のX軸上の中央に配置されており、変位または歪センサ(38)は変位、歪および/または力の測定を提供するために台座(30)へ連結されている。コンタクトパッド(14、114)は、上記変位および/または歪センサアセンブリが適用構造へ固定されることが可能なように、上記搭載構造のX軸の両端に形成されている。  (もっと読む)
(もっと読む)
推進工法用位置計測方法及びその装置
【課題】
複数接続された推進管の折れ角度及び方向を三次元的に即座に計測でき、各計測点の距離から推進管全体の位置を計測できる。
【解決手段】
推進工法において、掘進機1の後部に一端を固定し他端を複数の推進管2の中を通して発進立坑3内で張力をかけた測定用ワイヤ5を設け、当該測定用ワイヤ5を推進管2内の複数の位置で支持させ、当該各支持は、上記測定用ワイヤ5を遊通させる支持体7で支持し、当該支持箇所で測定用ワイヤ5の外周周囲の上下左右の4箇所に、歪みゲージを有するゲージプレートを設け、上記測定用ワイヤの挙動方向により、上記ワイヤが上記ゲージプレートを押圧して荷重をかけ、当該荷重がかかったゲージプレートの歪みゲージが示す歪み量と荷重がかかった歪みゲージの位置を検出して、各支持点の測定ワイヤの折れ角度及び方向を計測し、各支持点の距離から、上記掘進機及び複数の推進管の位置を計測する。
(もっと読む)
コードスイッチを用いた移動体の位置検知及び移動方向計測装置及びそのためのシート
【課題】安価なハードウェアで正確に位置検知及び移動方向計測ができるコードスイッチを用いた移動体の位置検知及び移動方向計測装置及びそのためのシートを提供する。
【解決手段】移動体2が移動する平面に広げて設置され、縦横に交差させて配置した複数本のコードスイッチ3を取り付けたシート4と、各コードスイッチ3のON/OFFを検知するスイッチ検知回路5と、ONになった縦横のコードスイッチ3の組み合わせからシート4内での移動体2の位置を検知する位置検知部6と、移動体2の位置の時間的変化から移動体2が移動している方向を計測する方向計測部7とを備えた。
(もっと読む)
磁気マーカ検出装置
【課題】本発明は、効率的に故障認識を行うことができる磁気マーカ検出装置の提供を目的とする。
【解決手段】走行路11上に敷設された磁気マーカMの発する磁界を検出する磁気センサ3内に車両2の所定方向に並んで配列される複数の磁気検出部を備え、複数の磁気検出部のうち所定の磁界強度条件を満たす磁気検出部を含む領域の中心位置を車両2に対する磁気マーカMの位置と認識する磁気マーカ検出装置であって、前記領域の中心位置と前記領域のうち前記所定の磁界強度条件を満たす磁気検出部が途切れることなく連続する領域の中心位置とを比較し、両中心位置が異なる場合には故障した磁気検出部があると判定する、磁気マーカ検出装置。
(もっと読む)
磁気マーカ検出装置及び磁気マーカ検出用故障認識方法
【課題】本発明は、故障認識の精度を向上させた磁気マーカ検出装置及び磁気マーカ検出用故障認識方法の提供を目的とする。
【解決手段】走行路11上に敷設された磁気マーカMの発する磁界を検出する磁気センサ3内に複数の磁気検出部が車両2の所定方向に並んで配列されており、車両2がどの位置を通過しても全ての磁気検出部が磁気を検出できるように配置された基準磁気マーカ(N極帯磁のMxn若しくはS極帯磁のMxs)を通過する時に、その通過時の基準磁気マーカの磁極を検出していない磁気検出部がないかを判定すると共にその通過時の基準磁気マーカと異なる磁極を検出している磁気検出部がないかを判定する。
(もっと読む)
歪センサ
【目的】 測定器の費用や設置場所等が必要なくなり、簡便で安価な歪センサを提供する。
【構成】 被検知部材1の歪を検知する歪センサにおいて、被検知部材1と、被検知部材1に塗料を塗装した塗膜部分2とを有し、塗膜部分2は被検知部材1が所定の値より大きい歪を受けるとひび割れ部分3を生じる。これにより、簡便で安価に歪検知ができ、部材の健全性や地震後等の部材の損傷度を簡単に確認することができる。
(もっと読む)
酸化物半導体、酸化物半導体の製造方法、変位センサ
【課題】 空間的、時間的な精度を向上でき、かつ低コストな変位センサ、並びにそのための酸化物半導体およびその製造方法を提供する。
【解決手段】 複数の第一導線2と、各第一導線2に交差する複数の第二導線3とを設ける。第一導線2と第二導線3との交点にて上記両者に対し接続されたダイオード4を設ける。各第一導線2に対し、順次切り換えて検出用電圧を印加するための第一スイッチSW1と、各第二導線3の導通/非導通を、順次、切り換えるための第二スイッチSW11〜14とを設ける。各第二導線3からの上記検出用電圧を検出して、上記各交点の相互間の変位を検出・演算する検出部6および演算部7を設ける。ダイオード4は、銅−亜鉛合金を低温酸化して、形成された亜鉛酸化物を主とする第一層と銅酸化物を主とする第二層とを備えた二層構造膜の酸化物半導体である。
(もっと読む)
トンネル内空変位計測システム、トンネル内空変位計測方法およびトンネル内空変位計
【課題】 トンネル断面の巨視的な内空変位を常時実用上十分な計測精度で得ることを可能とすると共に、簡単な機構でメンテナンスフリーを可能とする。
【解決手段】 トンネル内空変位計測システムは、覆工41に植設された支柱421〜429の各基端部に棒状変位計411,416,421,426,431,436,441,446の各端部、支柱421〜429の各先端部に棒状変位計413,414,423,424,433,434,443,444の各端部、支柱421〜429の各基端部と各先端部に棒状変位計412,415,422,425,432,435,442,445の各端部をそれぞれピン結合する。棒状変位計411〜416,421〜426,431〜436,441〜446からの軸方向変位に応じた信号に基づきトンネルの下端部の既知の2節点を基点として順次、3つの棒状変位計の交点座標を連続的に算出してトンネルの変状を測定する。
(もっと読む)
地中位置計測方法及びシステム
【課題】複数の地中位置において同時に対地三次元座標を計測できる地中位置計測方法及びシステムを提供する。
【解決手段】地上又は地中の既知三次元座標の複数の基準位置Rから、自己相関が強く相互相関が弱い識別符号列Pで変調された周期性基準信号frを、所定搬送周波数fcの回転磁界3に乗せて地中2へ発信する。地中2の計測位置Qに三以上の受信コイル素子群21が所定相互関係で取り付けられた磁界計測装置20を所定姿勢Sで配置し、回転磁界3により各コイル素子21に誘起される信号fqを計測する。各コイル素子21の計測信号fqと各識別符号列Pとの相関に基づき計測位置Qにおける各基準信号frの位相τを検知し、各基準信号frの位相τのコイル素子相互間位相差Δτとコイル素子群21の所定相互関係及び姿勢Sとから、各基準位置Rの向きθRを検出する。各基準位置Rの既知三次元座標と向きθRとから、計測位置Qの対地三次元座標を算出する。
(もっと読む)
スリップセンサ
【課題】 スリップの前兆を検知することができるスリップセンサを提供する。
【解決手段】 被接触面(路面25)と接する基体(タイヤ20)の表面に配列されて被接触面と接触する2種類の滑りやすさの異なる凸部(ブロック21,22)と、それら各凸部の変形を検出する変形検出手段(歪ゲージ31)と、その変形検出手段で検出された各凸部の変形から基体と被接触面とのスリップの前兆を判断する手段(受信/処理部36)とを備える。滑りにくいブロック22が摩擦力により変形しており、一方滑りやすいブロック21は滑って変形していない状態をもってスリップの前兆を検知する。
(もっと読む)
1 - 15 / 15
[ Back to top ]