
Fターム[2F063BA20]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 測定対象物の種類 (1,844) | エレベーター (5)
Fターム[2F063BA20]に分類される特許
1 - 5 / 5
磁気式近接センサ
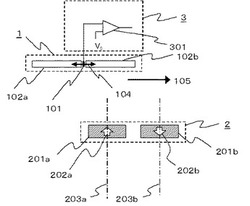
【課題】検出対象と検出部の距離が遠い場合でも、検出対象と検出部のギャップが変動する場合でも検出対象と検出部の近接を高精度に検出する。
【解決手段】磁界発生部2は、検出部1と磁界発生部2とが相対的に移動する方向に並設され、それぞれの磁化方向が略平行で互いに反対方向を向くように配置された一対の磁石202a、202bからなり、一対の磁石202a、202bのそれぞれを通り、磁気センサ101が検出する磁界の方向が反転する一対の磁界反転面203a、203bを形成する磁界を発生し、磁気センサ101は移動する際に磁界反転面203a、203bの少なくとも一方を横切るものであり、判定部3は磁気センサ101の検出信号の出力レベルが磁界反転面203a、203bを検出するための基準信号のレベルより大きいときに所定レベルの近接検出信号を出力するコンパレータ301を備えた。
(もっと読む)
被覆金属線の被覆厚測定装置

【課題】被覆の表面に凹凸を有する被覆金属線8であっても、変位センサ17及び被覆26の双方に衝撃、又は損傷を加えることなく、変位センサ17を被覆金属線8に近接させて被覆厚の測定を精度よく行うことが可能となる被覆厚測定装置を提供すること。
【解決手段】一方向に移送される被覆金属線8の被覆26に接触して配置され、この被覆26を介して芯線25までの距離を測定する変位センサ17を有するセンサ部9と、このセンサ部9に対して被覆金属線8の移送方向の上流側に配置され、前記センサ部9が測定する前記被覆26の部位において、被覆表面から所定値以上の高さを有する凸部又は所定値以上の深さを有する凹部を検出する検出部10とを備えている。
更に、センサ部9を保持する駆動手段11は、検出部10が上記凸部又は凹部を検出したときにセンサ部9を被覆26より遠ざけることを特徴とする。
(もっと読む)
移動体システム
【構成】 移動体2の走行方向に平行に2列に磁気マーク21,22を配置し、2個のリニアセンサ16,17で各磁気マーク21,22を基準とする絶対位置を求める。各磁気マーク21,22の中心の原点基準の絶対位置を記憶し、検出する磁気マークを切り替えながら、移動体2の絶対位置を求める。
【効果】 離散的に配置した磁気マークで、移動体の絶対位置を連続的に検出できる。
(もっと読む)
変位、歪および力センサ
変位、歪、および/または、力センサアセンブリ(10、110)は、X軸に沿った変位、歪、および/または、力の測定を促進する異方性剛性を有する一方で、望まれないYおよびZ軸に沿った変位、歪、および/または、力およびX、YおよびZ軸の回りの回転に起因するエラーが抑制する搭載構造(12)を有する。X軸に沿った軸方向の変位に応答するように構成されている台座(30、130)は、搭載構造(12)のX軸上の中央に配置されており、変位または歪センサ(38)は変位、歪および/または力の測定を提供するために台座(30)へ連結されている。コンタクトパッド(14、114)は、上記変位および/または歪センサアセンブリが適用構造へ固定されることが可能なように、上記搭載構造のX軸の両端に形成されている。  (もっと読む)
(もっと読む)
エレベータのかご位置検出装置
【課題】この発明は、設置スペースをより縮小することができるとともに、より簡単に据え付けることができるエレベータのかご位置検出装置を提供することを目的とするものである。
【解決手段】かご4には、検出エリアにおける静電容量を検出する検出センサ24d,24eが取り付けられている。各作動位置15U〜18U,15D〜18Dには、作動片5e〜8eが配置されている。作動片5e〜8eは、かご4の昇降により検出センサ24d,24eの検出エリアに相対的に進入する。また、作動片5e〜8eは、検出エリアに進入した状態での検出エリアの静電容量をそれぞれ異ならしめるようになっている。エレベータ制御装置30は、検出センサ24d,24eが検出した静電容量に基づいてかご4の位置を判定する。
(もっと読む)
1 - 5 / 5
[ Back to top ]