
Fターム[2F063BA22]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 測定対象物の種類 (1,844) | ロボット、マニピュレータ (33)
Fターム[2F063BA22]に分類される特許
1 - 20 / 33
電歪センサ
【課題】素子の変形により電気的変化を生じるセンサであって、時間が経過しても感度が低下しないセンサを提供する。
【解決手段】電歪素子の変形により静電容量変化を生じる電歪センサ(40)において、第1の電歪材料層(1)およびその両面に各々配置された一対の電極(3a、3b)より構成される第1の電歪素子(10)と、第2の電歪材料層(11)およびその両面に各々配置された一対の電極(13a、13b)より構成される第2の電歪素子(20)と、これら電歪素子間に挟持された基材(25)とを含む受感部(30)を設ける。受感部(30)は、外力の作用を受けることにより変形である。第1および第2の電歪材料層(1、11)の静電容量をそれぞれ測定可能なように、各電極に引出し線(5a、5b、15a、15b)が接続される。第1および第2の電歪材料層(1、11)は、10μm以下の厚みおよび20以上の比誘電率を各々有するものとする。
(もっと読む)
真空用モーター、真空用ロボット

【課題】真空排気装置に接続された空間に不純物ガスを放出しない真空用モーターと真空用ロボットを提供する。
【解決手段】
筒部材11と、回転軸12と、磁石14と、コイル15と、信号を生成する符号が、回転軸12の中心軸線を中心とする円周に沿って表面に配置された回転板21aと、信号を検出できるセンサ22aとを有し、回転板21aが配置された空間は真空排気装置42に接続されて真空排気される真空用モーター10aであって、内部にセンサ22aが配置されたセンサ室24aと、信号を透過する透過窓23aとを有し、透過窓23aはセンサ室24aの開口を塞ぐように設けられ、センサ室24の内部空間は回転板21aが配置された空間から分離され、センサ22aから放出された不純物ガスは真空排気装置42に接続された空間に放出されない。
(もっと読む)
引張変形検知布
【課題】障害者、人型ロボットの身体挙動を検知するシステムに使用される引張変形検知布において、編物又は織物の伸縮を静電容量の変化として検出することにより、検知システムとしての消費電力を抑制する。
【解決手段】複数の導電糸11を含んで構成された織物10を一方向に伸縮自在にすると共に、その伸縮に伴って導電糸11の隣接するもの同士の間隔が変化し、その隣接する導電糸同士間は絶縁状態が維持されるように構成され、隣接する各導電糸11の端部が静電容量を測定するための一対の電極13,14とされている。織物10の伸縮を静電容量として検出するため、導電糸11には電圧は印加されても電流は流れず、この部分での消費電力はゼロとすることができ、検知システム全体としての消費電力を抑制することができる。
(もっと読む)
エンコーダ装置、駆動装置、及びロボット装置
【課題】位置情報を高精度に検出することができるエンコーダ装置を提供する。
【解決手段】エンコーダ装置は、第1信号を出力する第1のエンコーダと、第2信号を出力する第2のエンコーダと、第1信号に基づいて第1のエンコーダの回転位置情報を示す第1位置情報を生成する第1位置情報生成部と、第2信号と第2のエンコーダの回転位置情報の補正値を示す第1の補正テーブルとに基づいて、第2のエンコーダの回転位置情報を示す第2位置情報を生成する第2位置情報生成部と、第1位置情報と第2位置情報とを用いて第1位置情報に対する第2位置情報の相対的な変位を検知する判定部と、予め生成されている複数の補正テーブルの中から、第2位置情報の相対的な変位に応じて第2の補正テーブルを選択し、選択した第2の補正テーブルに基づいて、第1の補正テーブルを変更する補正テーブル変更部とを備える。
(もっと読む)
エンコーダ装置、駆動装置、及びロボット装置
【課題】位置情報を高精度に検出することができるエンコーダ装置を提供する。
【解決手段】エンコーダ装置は、第1信号を出力する第1のエンコーダと、第2信号を出力する第2のエンコーダと、第1信号に基づいて、第1のエンコーダの回転位置情報を示す第1位置情報を生成する第1位置情報生成部と、第2信号と第2のエンコーダの回転位置情報の補正値を示す補正テーブルとに基づいて、第2のエンコーダの回転位置情報を示す第2位置情報を生成する第2位置情報生成部と、第1位置情報と第2位置情報とを用いて前記第1位置情報に対する第2位置情報の相対的な変位を検知する判定部と、第2位置情報の相対的な変位を検知した場合に、第2位置情報の変位に応じて補正テーブルを生成する補正テーブル生成部とを備える。
(もっと読む)
接触検出装置および接触検出装置を適用したロボットシステム
【課題】ノイズに強く、アプリケーションに応じて接触検出器の数の増減が容易で、接触位置も特定可能な接触検出装置を提供する。
【解決手段】 2接点スイッチと抵抗値のそれぞれ異なる抵抗器から構成される複数の接触検出器を、リファレンス電源線、アース線および信号線からなる接続ケーブルで信号処理部に接続する。信号線には接触有無と接触時のその位置を表す信号が検出され、この信号から信号処理部で接触状態と接触位置を判別し検出する。また、この接触検出装置をロボットの腕、胴、頭など各部位に装着しその接触状態を検出する。
(もっと読む)
エッジ推定装置およびエッジ推定方法
【課題】簡単かつ確実に、検知面に接触した物体のエッジを推定するエッジ推定装置を提供する。
【解決手段】検知面上に配列された複数の圧力検出部(感圧センサ16b)と、圧力検出部が検出した圧力に基づき、隣接する圧力検出部が検出した圧力の圧力差を演算する圧力差演算手段21と、圧力差演算手段21が算出した圧力差の大きさが所定の閾値を超えたか否かを判定し、超えた場合に、当該圧力差を求めた圧力検出部の位置を、検知面に接触した物体のエッジの位置に対応するエッジ点であると判定するエッジ点判定手段22とを備えてエッジ推定装置を構成する。
(もっと読む)
障害検出装置及び移動ロボット
【課題】障害の方向を検出する。
【解決手段】バンパー2に力が掛からないときは走行装置のフレーム1との間が弾性体によって非接触に保持されており、抵抗線10と導電部材11とは接触しない。何らかの障害によってバンパー2に力が加わると、抵抗線10と導電部材11とが接触し、抵抗線10の接触点の電位が検出電圧Voutに出力する。検出電圧Voutは、略環状に配置している抵抗線10の位置を示しており、これに基づいて力が掛かった方向を検出する。
(もっと読む)
計測機能付きチャック装置及びロボットチャック装置
【課題】計測機構が小型軽量で且つ適切に収容され、計測精度を向上できると共に、安価に製造できる計測機能付きチャック装置及びロボットチャック装置を提供すること。
【解決手段】一方の電極11に対し、他方の電極12が、所要の間隔を保ちつつスライド可能に配されたセンサー部10と、両電極11、12に関する静電容量を検出する容量検出素子40と、容量検出素子40によって得られた信号に基づいて一方の電極11に対する他方の電極12の変位に関する計測情報を出力する計測情報出力回路50と、一方の電極11が固定されると共に、計測と同時に保持されるべきワークの一端側に当接されるストッパ部22を有するチャック用基部20と、他方の電極12が装着されて一体となってストッパ部22に対して接離動可能に設けられ、前記ワークの他端側に当接されるチャック用可動爪部30とを備える。
(もっと読む)
多段モータを駆動源とする基板搬送ロボット
【課題】多段同芯モータを駆動源に有する基板搬送ロボットにおいて、モータの検出部が小型であって、アームの高い制御性能を確保でき、また検出部の交換が容易な基板搬送ロボットを提供する。
【解決手段】ロボットアームを駆動する第1回転モータ13と第2回転モータ14を軸方向に多段に配置した駆動部を有する基板搬送用ロボットにおいて、第1回転モータ13の回転位置検出部が、第1インクリメンタルエンコーダヘッド21と、それよりも回転位置検出精度の粗い絶対値位置検出器である回転角度センサ25a,bとから成り、第2回転モータ14の回転位置検出部が、第2インクリメンタルエンコーダヘッド22と、それよりも回転位置検出精度の粗い絶対値位置検出器である回転角度センサ26a,bとから成るよう構成した。
(もっと読む)
繊維状変形センサおよび布帛状変形センサ
【課題】 空気中で安定的に高い応答感度で機能する軽量で可撓性を有する繊維状あるいは布帛状の変形センサを提供する。
【解決手段】 繊維状変形センサ10は、ヘテロ原子を有する単量体単位を含む重合体または該重合体のブロックを含むブロック共重合体から選ばれる高分子成分と、イオン液体とを含有する非水系高分子固体電解質12の変形により、非水系高分子固体電解質12に接し、互いに絶縁された少なくとも一対の電極11・13に電位差を発生する変形センサであって、非水系高分子固体電解質12と電極11・13とが繊維断面を構成して繊維長方向に連続する複合繊維である。布帛状の変形センサはこの複合繊維10を織布、不織布、編成物にしたものである。
(もっと読む)
指骨接触ロードセル
【課題】許容される大きさで、一軸を超えて作用するロボットの手の指が受ける負荷を測定するセンサーを提供する。
【解決手段】ロボットシステムの指骨に掛かる負荷を測定する接触ロードセル10は、指骨にそのロードセル10を搭載するのに使用できる第一及び第二端部30,34と、中央部32とを有しているフレキシブルひずみ素子12を備えている。ひずみ素子12は、また、第一端部30及び中央部32に接続される少なくとも3つの部位を有する第一S形状部材110と、第二端部34及び中央部32に接続される少なくとも3つの部位を有する第二S形状部材112とを備えている。ロードセル10は、また、8対のひずみゲージを備えており、そのひずみゲージの各対は、各S形状部材110、112の各部位の1つの対向する両面に搭載されており、ひずみゲージの各対は、6つの自由度におけるひずみ測定値を提供している。
(もっと読む)
真空用接触センサ
【課題】構成簡易ながら検知範囲を広く設定し得る上に死角が少なく、かつ接近感知部を軽量とすることが可能な真空用接触センサを得る。
【解決手段】接近感知部10は、互いに接触または近接すると電気的に導通するように構成された可撓性を有する第1および第2の導電性薄板11,12を、内外方向に互いに離間した状態でアーチ状に湾曲形成してなるものであり、マニピュレータ3の先端表面部の全域を覆うように配置されている。マニピュレータ3が他物体と衝突する前に接近感知部10が他物体に当接して変形し、第1および第2の導電性薄板11,12が互いに接触または近接して電気的に導通したことを導通検出回路部20が検出することにより、マニピュレータ3が他物体と接近したことを検知する。
(もっと読む)
角度検出装置の角度補正曲線取得方法及び角度検出装置
【課題】メモリ容量が少なくてもリアルタイムでしかも高精度に角度検出が可能な角度検出装置の角度補正曲線取得方法及び角度検出装置を提供する。
【解決手段】角度検出装置により検出される全角度に対し、各角度において得られる磁気の強さを検知しその対応関係を角度補正曲線として取得するステップと、前記角度補正曲線の補正前角度に対する補正後角度の変化を求め2つの変曲点を有する変曲部を求めるステップと、前記変曲部に応じて補正前角度の区間を決定するステップと、前記区間について前記角度曲線を所定次数の近似多項式により近似するステップと、得られた近似角度曲線と前記補正角度曲線の誤差角度が所定値を超えるとき近似多項式の次数を上げるステップと、前記誤差角度が所定値以下のときその区間の近似多項式を決定しその係数を求めるステップと、前記近似多項式とその係数及びその角度区間を記憶するステップとを有する。
(もっと読む)
レゾルバ
【課題】 シートコイル部の狭幅化によるレゾルバ全体の小型コンパクト化及び低コスト化を図る。
【解決手段】 励磁信号Sx,Syが入力するシートコイル部Cmにより形成した励磁巻線2x,2y又は検出信号Sdが出力するシートコイル部Cdにより形成した検出巻線3の一方を固定し、かつ他方を回転部4に設けて構成したレゾルバ本体10と、回転部4の回転角Φに応じて変化する検出信号Sdと励磁信号Sx,Syの位相差から回転角Φを検出する信号処理回路30を備えるレゾルバ1を構成するに際して、励磁巻線2x,2yにおける各磁極Mn…,Ms…を構成する複数の導線部L…をそれぞれ一又は二以上に区分し、各区分Z…内における各導線部L…を並列接続するとともに、各区分Z…同士を順次直列接続し、かつ正弦波磁束分布を生じさせるように各導線部L…の位置xa…又は各導線部L…の電気抵抗ra…を設定する。
(もっと読む)
多次元位置センサ
コントローラと、可動部と搬送経路とを有し前記コントローラと連通するワークピース搬送機と、前記可動部に固着した少なくとも1つの界生成プラテンと、搬送経路に沿って配置されコントローラと連通する少なくとも1つのセンサ群とを含み、前記界生成プラテンが位置計測とともに可動部を推進させるように構成される多次元測位装置とを備える装置であって、前記の少なくとも1つのセンサ群の各センサは、少なくとも1つの界生成プラテンで発生させる検知界内の単軸に沿ったばらつきに対応する1つのみの出力信号を提供するように構成され、前記コントローラは、前記の少なくとも1つのセンサ群の各センサに隣接した前記可動部の多次元位置を、前記の少なくとも1つのセンサ群内の少なくとも1つのセンサの前記1つのみの出力信号に基づいて、多次元位置には、少なくとも平面位置と、ワークピース搬送機と少なくとも1つの前記センサ群との間のギャップとを含めて算出するよう構成されている装置。 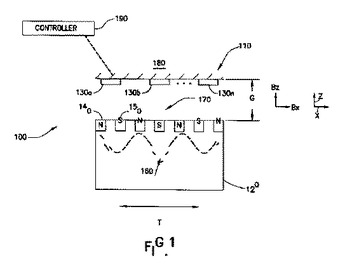 (もっと読む)
(もっと読む)
脚式移動型ロボット
【課題】床面までの距離を正確に測定することができる脚式移動型ロボットを提供すること。
【解決手段】本発明の一態様にかかる脚式移動型ロボットは、脚部によって床面を移動する脚式移動型ロボットであって、脚部10に設けられた足平本体部40と、足平本体部40に対して摺動可能に取り付けられ、足平本体部40の底面よりも床面側に突出する可動部51と、可動部51の摺動位置を検出する変位センサ57と、可動部51が足平本体部40の足裏面40aに近づく方向の摺動端において、可動部51の下端が足平本体部40よりも床面側に突出するよう、可動部51の摺動範囲を規制する係止部59と、を備えるものである。
(もっと読む)
磁気抵抗効果素子を用いた位置検知装置
【課題】 磁石とこの磁石に対向して移動する検知器を用いて、比較的広い領域で位置検知ができるようにした磁気抵抗効果素子を用いた位置検知装置を提供する。
【解決手段】 磁石2の円形の表面2aがN極に着磁され、背面2bがS極に着磁されている。検知器10は、磁石2の表面2aから離れた位置でX−Y平面内で移動する。検知器10内にはX方向の磁界の方向とその強度を検知できる磁気抵抗効果素子と、Y方向の磁界の方向とその強度を検知できる磁気抵抗効果素子とが設けられている。中心Oを通り半径方向に延びるそれぞれの放射軸上において、放射軸の方向の磁界の強度が一次関数で変化する領域内では、前記検知器10内の各磁気抵抗効果素子の電気抵抗の変化を検知することで、検知器10のX−Y座標上の位置を知ることができる。
(もっと読む)
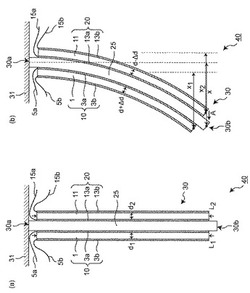
角度及び変位センサ
【課題】回転中心周りに回転する部位の角度変化の測定にはロータリーエンコーダ等が適用可能であるが、身体の関節部のように、回転中心が不明な場合や、回転に伴って回転中心が移動する部位の角度変化を測定することとは困難であった。
【解決手段】柔軟な弾性体10の両面を圧電フイルム1A、1Bで挟んだ歪検出素子200を、柔軟な材質の張力伝達部材30の一方の端部付近の中立軸に配設し、該張力伝達部材30と歪検出素子200の一部を重ねて拘束して歪検出素子200の曲げ変形を拘束する部分を形成する。張力伝達部材30の他の端部には該部材に張力を与える手段を取り付けて構成し、張力伝達部材30に外力が加わって生じた曲がり角度を歪検出センサー200の電気出力として検出することを特徴とする。
(もっと読む)
荷重検出装置
【課題】バネから直接に荷重や変位情報を簡単に取り出す検出方法とその装置を提供する。
【解決手段】バネ1が引張,圧縮の変形をする時にそれ自体の微小な抵抗変化を電圧変化,あるいは抵抗変化そのものを検出する。電圧変化として測定する場合,平衡回路として4個の抵抗を組んで成るホイートストンブリッジ回路のアクティブ抵抗3に並列,あるいは直列にバネに取り付けたリード線2を介してバネを抵抗体として導入して検出する。バネ以外の板や棒材の変形についても同じである。
(もっと読む)
1 - 20 / 33
[ Back to top ]