
Fターム[2F063BA29]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 測定対象物の種類 (1,844) | 生体 (231)
Fターム[2F063BA29]に分類される特許
1 - 20 / 231
静電検出センサ
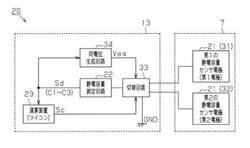
操作入力検知装置及び開閉部材制御装置
【課題】より高い精度で操作入力を検知することのできる操作入力検知装置を提供すること。
【解決手段】操作入力検知装置20は、操作入力領域に隣接する導電性領域から離間した位置に設けられた第1電極31と、当該第1電極31と導電性領域との間に間隔をあけて設けられた第2電極32とを備える。また、操作入力検知装置20は、これら第1電極31及び第2電極32が近傍の導体との間に形成するコンデンサの静電容量を測定する静電容量測定回路22と、その測定結果を処理する演算装置23とを備える。そして、演算装置23は、第2電極32を第1電極31と同電位にした状態で第1電極31を用いて測定された第1の測定結果に示される接触状態と、第1電極31を第2電極32と同電位にした状態で第2電極32を用いて測定された第2の測定結果に示される接触状態とに基づいて、操作入力検知を実行する。
(もっと読む)
センサシート、検出回路、タッチパネル装置、およびタブレット入力装置

【課題】高い検出感度を有し且つ全面をムラなく照光することができるセンサシート、検出回路、タッチパネル装置、およびタブレット入力装置を提供すること。
【解決手段】保持体4と、保持体4の厚さ方向における一方のみの面上に互いに離間して配置された3つ以上の検出電極7と、保持体4の厚さ方向から見たときに3つ以上の検出電極7と重なるように前記一方とは反対側の面上に配置された複数の中継電極10と、前記反対側の面上に配置された配線であって各前記中継電極に電気的に接続されているとともに検出回路に電気的に接続される配線9と、を備え、複数の中継電極10のうちの1つの中継電極10は、3つ以上の検出電極7のうちの1つの検出電極7と対向し、且つ、保持体4の厚さ方向から見たときに、当該1つの検出電極7に隣接する他の検出電極7の輪郭線の外側領域に配置されていることを特徴とする。
(もっと読む)
医療用チューブの先端位置検出システムおよび当該システムに適用する医療用チューブ
【課題】医療用チューブの先端位置を簡易且つ正確に検出することができ、また安全性を向上させることのできる医療用チューブの先端位置検出システムを提供する。
【解決手段】軟質磁性体で構成されて、医療用チューブ500の先端部に設けられる被検出体10と、該被検出体を患者の体外から検出する検出装置とから構成され、検出装置は、磁界の向きと強度が時間的に変化する第1の交流磁界を体外において発生させる発生手段20と、該発生手段によって発生された第1の交流磁界によって磁化される被検出体から発生される第2の交流磁界を体外で検出する検出手段30と、該検出手段による検出結果に基づいて被検出体の位置を推定する推定手段40とを備える。
(もっと読む)
人体部位位置測定装置および電子機器システム
【課題】人体の特定位置を非接触で測定する新規な手段を提供すること。
【解決手段】人体部位位置測定装置は、人体表面に電磁場を伝搬させる励振器1と、励振器1から離間して配置された電磁場変動検出器2とによって構成されている。電磁場変動検出器2は、互いに離間して設けられた2つの電極20A、B、乗算器23A、Bを有している。乗算器23Aには、電極20Aと、移相器25Aを介して電極20Bとが接続している。一方、乗算器23Bには、移相器25Bを介して電極20Aと、電極20Bとが接続している。乗算器23A、Bの出力側は減算器26に接続していて、減算器26の出力側は、ローパスフィルタ28を介してオシロスコープに接続している。
(もっと読む)
モーションキャプチャ装置およびモーションキャプチャプログラム
【課題】被測定者の動作の制約が少ない状態で舌の動きを計測することができるモーションキャプチャ装置およびモーションキャプチャプログラムを提供する。
【解決手段】モーションキャプチャ装置1は、被測定者Mの舌表面に貼付される磁気ソース10と、被測定者Mの顔表面に貼付され、磁気ソース10によって形成される磁場を検出する磁気センサ40と、被測定者の顔表面に貼付された磁気センサ40と同一の位置に配置された光学マーカ41と、光学マーカ41を異なる位置および異なる方向から撮影する複数の撮影装置60と、磁気センサ40によって検出された磁場の大きさと、撮影装置60によって撮影された光学マーカ41の画像とから、被測定者Mの舌表面に貼付された磁気ソース10の絶対座標を算出する座標算出手段70と、からなる。なお、磁気ソース10と磁気センサ40の位置は入れ替えてもよい。
(もっと読む)
歪み相殺を備えた磁界発生器パッチ
【課題】磁界発生器を提供する。
【解決手段】磁界発生器は、基材、主発生器コイル、少なくとも1つの磁界センサ、少なくとも1つのシムコイル、ドライバー回路及び補正回路を含む。主発生器コイル、磁界センサ、及びシムコイルは、全て基材上に配置されている。ドライバー回路は、選択された周波数にて駆動電流を使用して主発生器コイルを駆動するよう連結されている。補正回路は、少なくとも1つの磁界センサから選択された周波数にて信号を受信し、定義済みベースラインからの信号における偏位に応答して、ベースラインに信号を戻すよう構成された振幅を有する駆動電流を使用して、少なくとも1つのシムコイルを駆動するよう連結されている。
(もっと読む)
センサモジュール及び表示装置
【課題】 サイズの小型化を図ることができる、動作の安定性に優れたセンサモジュール及びセンサモジュールを備えた表示装置を提供する。
【解決手段】 センサモジュールは、第1センサ回路1と、第2センサ回路2と、差分回路20と、を備える。第1センサ回路1は、第1検知電極DE1と、薄膜トランジスタで形成された第1アンプAMP1と、第1カップリング容量Ccp1と、を有する。第2センサ回路2は、第2検知電極DE2と、薄膜トランジスタで形成された第2アンプAMP2と、第2カップリング容量Ccp2と、を有する。差分回路20は、第1アンプAMP1のドレイン電極及び第2アンプAMP2のドレイン電極に接続されている。
(もっと読む)
配線構造体、センサ、及び配線構造体の製造方法
【課題】柔軟に屈曲あるいは変形可能でありつつ、曲げあるいは引っ張りによる断線が発生しにくく、断線が発生したとしても応力が解除されることにより導電性を復元させることが可能な配線構造体、センサ、及び前記当該配線構造体の製造方法の提供を目的とした。
【解決手段】センサ10が備えている配線構造体20は、ベース層22、導電層24、及びカバー層26を積層させたものである。ベース層22及びカバー層26は、柔軟性を有する樹脂素材によって形成されている。また、ベース層22の表面には、断面形状が波形の凹凸部28が形成されており、この凹凸部28の上に導電層24が積層されている。
(もっと読む)
静電容量型センサ装置
【課題】外力の位置および大きさを高精度に検出することができる静電容量型センサ装置を提供する。
【解決手段】距離を隔てて対向して設けられた電極対Es(11,12)をマトリックス状に配置し、電極対Es(11,12)の間に弾性変形可能な誘電層13を配置してなる静電容量型センサ10を用いる。静電容量計測部50が、選択された電極対Esを含む複数の電極対Esからなる電極対群Egの間の静電容量の計測を、複数の組み合わせからなる電極対群Egについて行う。このようにして計測された複数の静電容量に基づいて、外力算出部60が、選択された電極対Esの位置に付与された外力Fの大きさを算出する。
(もっと読む)
歪抵抗薄膜および当該歪抵抗薄膜を用いたセンサ
【課題】歪抵抗薄膜全体としてのTCR値を低く抑えることが可能であると共に、温度サイクルに対して、比抵抗ρに代表される電気特性が安定で、かつ優れた高温安定性と高いゲージ率とを実現可能な歪抵抗薄膜および当該歪抵抗薄膜を用いたセンサの提供。
【解決手段】積層膜からなる歪抵抗薄膜10、20であって、上記積層膜が、クロム薄膜、酸化クロム薄膜または窒化クロム薄膜からなる第一の薄膜11、21と、第一の薄膜11の両主面のうち第一面111または第一面211と第二面212に積層され、薄膜の膜厚を同一としたときのTCR値[ppm・K−1]が第一の薄膜より小さい第二の薄膜12、22、23とを少なくとも一層以上有し、上記積層膜を構成する第二の薄膜12、22の一つが上記積層膜の表出面Sとして表出している歪抵抗薄膜とする。
(もっと読む)
引張変形検知布
【課題】障害者、人型ロボットの身体挙動を検知するシステムに使用される引張変形検知布において、編物又は織物の伸縮を静電容量の変化として検出することにより、検知システムとしての消費電力を抑制する。
【解決手段】複数の導電糸11を含んで構成された織物10を一方向に伸縮自在にすると共に、その伸縮に伴って導電糸11の隣接するもの同士の間隔が変化し、その隣接する導電糸同士間は絶縁状態が維持されるように構成され、隣接する各導電糸11の端部が静電容量を測定するための一対の電極13,14とされている。織物10の伸縮を静電容量として検出するため、導電糸11には電圧は印加されても電流は流れず、この部分での消費電力はゼロとすることができ、検知システム全体としての消費電力を抑制することができる。
(もっと読む)
圧力センサおよび傾き検出装置
【課題】歩行補助装置の装着者の足裏にかかる荷重方向を感知することが可能な圧力センサを提供する。
【解決手段】本発明は、圧力により面抵抗が変化する感圧シートと、3つ以上の電極が設けられた電極シートとを備え、前記感圧シートの一方の面と、前記電極シートの一方の面とが重なり合って構成される圧力センサにおいて、前記3つ以上の電極は、前記電極シートの前記面上の互いに異なる位置に設けられ、且つ、前記感圧シートの前記面であって各前記電極間に位置する前記面を含む各領域が絶縁され、前記各領域の抵抗が測定可能に設けられている。
(もっと読む)
角度測定装置及び方法
【解決課題】物体、動物、人間において形成される角度、具体的には人間における各関節部の角度や、各種装置、構造物などの構成要素同士が形成する角度など、複数の部位のなす角度を形成する複数の部位それ自体が静止状態であっても、積分処理を行わずにそのなす角を測定可能な角度測定装置及び方法を提供する。
【解決手段】複数の部位1,2のなす角度を求める角度測定装置を、部位1,2にそれぞれ取り付ける地磁気センサ11,12と、地磁気センサ11,12から出力したデータに基づいて複数の部位1,2がなす角度を求める処理部15と、部位1,2への地磁気センサ11,12の取付態様の違いを補正するための補正情報を格納する補正情報格納部17とを備える。処理部15が、補正情報格納部17に格納した補正情報を参照して、各地磁気センサ11,12から出力されたデータを補正し、複数の部位1,2のなす角度を求める。
(もっと読む)
静電気容量検知型指紋読取りセンサ
【課題】絶縁層上に複数のセンサ電極を配列し、該複数のセンサ電極の上面及び側面をパシベーション膜で包み、更に各センサ電極の四辺を金属パターンからなる放電層で囲むようにした静電容量検知型指紋読取りセンサにおいて装置内部の容量検出回路等への静電気の影響を抑制し、装置の信頼性が向上するとともに、装置表面に接触した指の指紋を、安定かつ高感度で検出する。
【課題を解決するための手段】
上記パシベーション膜はシリコンオキシナイトライドをPECVD法により堆積させて膜厚に形成すると共に、パシベーション膜の上面に上記放電層を設け、更にセンサ電極の四辺を囲む放電層のうち対向状に並ぶ1又は2組の放電層に電界分布の集中部を形成するようにした静電気容量検知型指紋読取りセンサ。
(もっと読む)
生体適合性ポリマーセンサ及びその製造方法
【課題】生体適合性を有していながらも、皮膚など様々な被貼付物に貼付することが可能なポリマー基板及びその製造方法を得る。
【解決手段】生体適合性ポリマーセンサ100は、基板10と、基板10の表面に形成された一対の配線11、12と、配線11、12の一部を被覆するように基板上に形成された圧電部材13と、圧電部材13を被覆するように設けられたフィルム状部材14と、を備えているものである。圧電部材13は、PVDFなどの圧電材料からなる層であり、0.5μm〜3.0μm程度の厚さを有したものである。フィルム状部材14は、PDMSなどの柔軟性を有した樹脂からなりものであり、0.5μm〜3.0μm程度の厚さを有したものである。圧電部材13及びフィルム状部材14は、インクジェット方式の印刷によって形成することが可能である。
(もっと読む)
歪検知素子、および血圧センサ
【課題】 本発明の実施形態によれば、感度よく検知できる歪検知素子、および圧力セン
サを提供することができる。
【解決手段】 磁化方向が変化可能で外部歪が印加されていない状態では磁化が膜面垂
直方向を向いている磁化自由層と、磁化を有する参照層と、前記磁化自由層と前記参照層
との間に設けられたスペーサー層と、を備えた積層膜と、前記積層膜の積層面に対して垂
直方向に通電する一対の電極と、前記一対の電極の何れか一方に設けられた基板と、前記
基板が歪むと、前記磁化自由層の磁化の回転角度と前記参照層の磁化の回転角度が異なる
ことを特徴とする歪検知素子。
(もっと読む)
操作信号生成装置、および、操作信号生成方法
【課題】ユーザにより操作される機器が誤動作しにくくなるように、適切に操作信号を生成する。
【解決手段】受付部11は、機器を操作するための操作入力であって、ユーザの体の一部によってなされる操作入力を受け付ける。検知部12は、ユーザの体の一部が受付部11に向かって接近する接近速度を検知する。生成部13は、受付部11により操作入力が受け付けられる際に検知部12により検知された接近速度が、あらかじめ設定された基準範囲内である場合、当該操作入力に対応づけられた操作信号を生成する。出力部14は、生成された操作信号を機器に出力する。
(もっと読む)
複数の検出機能を有する静電容量検出回路
【課題】 回路規模が大きくなったり、またコストが高くなったりすることなく、センサに触れた際の接触座標の検出に加えて同時に押下の強弱等の他の検出が可能な、すなわち複数の検出機能を有する静電容量検出回路を提供することを目的とする。
【解決手段】 指や掌の接触による容量変化を検出する静電容量検出回路であって、さらに当該回路の放電経路中に放電用抵抗と機能切り替えスイッチにて切り替え可能で、かつ指や掌の押下強度により抵抗値が変化する圧力センサを付加することにより、接触座標の検出と押下圧を同時に検出できる機能を具備する複数の検出機能を有する静電容量検出回路。
(もっと読む)
センサ装置および情報表示装置
【課題】検出可能距離および検出感度を向上させることができるセンサ装置および情報表示装置を提供する。
【解決手段】上記センサ装置は、センサ部10と、演算部12と、切替回路部11と、制御部13とを具備する。センサ部10は、検出対象物の近接によって静電容量が変化する複数の検出電極を有する。演算部12は、検出対象物とセンサ部との間の距離である第1の距離を算出する。切替回路部11は、複数の検出電極を、上記静電容量の検出のための信号電圧が供給される第1の状態と電気的に浮遊した第2の状態との間で切り替える。切替回路部12は、複数の検出電極のうち第2の状態から第1の状態へ切り替えられる二以上の検出電極を一つずつ選択する。制御部13は、第2の状態から第1の状態へ切り替えられる検出電極相互間の距離である第2の距離が上記第1の距離に対応するように切替回路部11を制御する。
(もっと読む)
1 - 20 / 231
[ Back to top ]