
Fターム[2F063BB02]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 測定対象物の性質、材質 (622) | 導電性を有するもの (179)
Fターム[2F063BB02]に分類される特許
161 - 179 / 179
電縫鋼管中継ぎ溶接部の検出方法
【課題】本発明は、造管後であっても、オンラインで電縫鋼管の中継ぎ溶接部を従来より精度良く検出可能な電縫鋼管中継ぎ溶接部の検出方法を提供することを目的としている。
【解決手段】製造ライン上を走行する先行鋼帯の後端部に後行鋼帯の先端部を溶接して、鋼帯に中継ぎ溶接部を形成させた後、該鋼帯を円筒状に成形し、突き合わせた幅方向両端部を溶接して電縫鋼管に造管してから、該電縫鋼管に存在する前記中継ぎ溶接部を検出する技術である。具体的には、前記電縫鋼管に近接して高周波電圧を印加するコイルを配置し、該コイルが発する高周波磁束により該電縫鋼管内に生じる渦電流を常時測定し、その測定値を一定の閾値と比較して、その大小で中継ぎ溶接部の位置を判定する。
(もっと読む)
容量検出回路及び容量検出方法

【課題】 被検出対象物からのノイズの影響を受けずに、良好な形状検出を行う容量検出型センサを提供する。
【解決手段】 本発明の容量検出回路は、複数の駆動配線に対して検出配線が交差して配線されると共に、交差する駆動配線及び検出配線間で容量を形成する検出電極がセンサ面内に形成され、被検出物によって変化する検出電極の容量変化を電圧値として検出する容量検出回路であり、駆動配線を駆動させる列配線駆動手段と、複数の検出配線から所定の検出配線を選択する検出配線選択手段と、検出電極の近傍に配置され、被検出物の電位を参照電位として検出する参照電極と、参照電位と、検出電極の容量に対応した電流から求めた検出電位とに基づいて、容量変化に対応した電圧値を求める容量演算部とを有する。
(もっと読む)
モールドモータの測定装置及びその方法
【課題】モールドモータに埋設された配線基板を破壊することなく、反りや撓みが発生しているかを検査することができるモールドモータの測定装置及びその方法を提供する。
【解決手段】固定子12と配線基板20をモールド樹脂によってモールド成形してモータフレーム22を成形したモールドモータ10において、測定装置50の測定台52にモールドモータ10を置き、測定台52に内蔵されている6個の近接センサー56から配線基板20までの距離をそれぞれ求め、評価用データと比較して、モールドモータ10に内蔵されている配線基板の反りや撓み状態を判断する。
(もっと読む)
車両検知装置
【課題】 背景磁場の変動に影響されず、かつ遠方の車両を誤検知することが防止できる車両検知装置を提供する。
【解決手段】 道路下に道路の長手方向に間隔をおいて配置した複数の磁気センサ1と、これら磁気センサの出力が示す道路長手方向の磁気分布の波形的特徴から所望の車線について車両が通過したことを検知する演算装置2とを備えた。
(もっと読む)
容量式物体検出装置
電界検出を用いる、準静電検出法として知られるクロスキャパシタ検出法と称されうる物体検出システム(50)及び方法が開示される。このシステム(50)は、少なくとも1つの電極装置(30)を備え、各電極装置(30)は1つの電界検出受信電極(32)と2つの電界検出送信電極(34,36)とを備える。一方の電界検出送信電極(36)は、他方の電界検出送信電極(34)が駆動される交番電圧(120)に比較して少なくとも部分的に逆位相部、例えば反転信号を有する交番電圧(130)によって駆動される。これは、電界検出受信電極(32)に誘導された電流の変化を検出することによって行われる物体検出の空間精度を改善する。1つの構成例においては、2つの電界検出送信電極(34,36)は前記電界検出受信電極(32)を取囲むように配置された環状リング形状をしている。 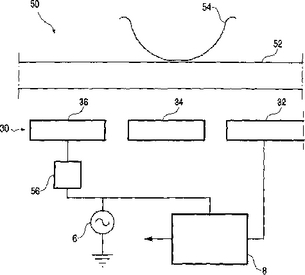 (もっと読む)
(もっと読む)
静電容量検出装置
【課題】 優良な静電容量検出装置を実現する。
【解決手段】 M行N列の行列状に配置されたM本の行線とN本の列線、及び此等交点に設けられた静電容量検出素子とを具備し、静電容量検出素子は信号検出素子と信号増幅素子とリセット素子とを含み、信号検出素子は容量検出電極と容量検出誘電体膜とを含み、信号増幅素子はソース電極とドレイン電極とゲート電極とを有する信号増幅用薄膜半導体装置から成り、リセット素子はソース電極とドレイン電極とゲート電極とを有するリセット用薄膜半導体装置から成り、信号増幅素子のゲート電極と容量検出電極とリセット素子のドレイン電極とが接続されて居る。
(もっと読む)
電荷移動を利用した容量式位置センサ
ユーザの指とすることができる物体の本体に沿った位置を容量検出する。測定回路は、本体の二つの端部に同時に注入される電荷を測定し、この本体は直線、または曲線の形に形成することができる。計算デバイスは、素子の各端部に注入される電荷の量の相対的変化の比を計算する。この計算の結果は、1次元の座標番号に検出状態表示を加えたものであり、これらの両方は家電機器制御装置のような別の機能素子に転送することができ、この機能素子が座標及び検出状態を命令及び測定値に変換する。 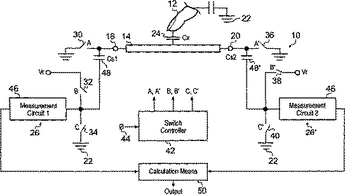 (もっと読む)
(もっと読む)
導電性の材料から成る層の厚さを無接触に突き止めるための方法
部品(17)の導電性材料から成る層(20)の厚さを無接触で突き止めるための方法において、コイル体(13)とコイル(14)とから成るセンサが測定すべき部品(17)の近傍に位置決めされる。この方法は誘導および渦電流原理の組み合わせに基づいている。コイル(14)に第1の交流電流周波数f1および第2の交流電流周波数f2が供給されかつそのインダクタンス変化が評価される複数の測定および評価ステップにより、層(20)の厚さが突き止められる。その際コイル体(13)、従ってまたコイル(14)と部品(17)との距離は第2の交流電流周波数f2が供給されるコイル(14)のインダクタンス値から導出される。 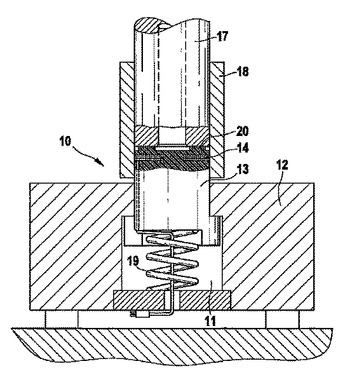 (もっと読む)
(もっと読む)
変位検出器
【課題】 板ばねの撓みによる横ずれを抑制し、変位検出を正確にできる変位検出器を提供すること。
【解決手段】 板ばね221A〜Dによって対物レンズ1を光軸方向に変位させる構成の合焦点式変位検出器において、対物レンズ1の横ずれを補正するための板ばね311A〜Dが設けられる。板ばね221A〜Dが撓められると、対物レンズ1は光軸方向と垂直な方向に横ずれするが、このとき、板ばね311A〜Dを撓めることによって、横ずれを相殺する。横ずれを相殺することによって、対物レンズ1の軌道を正確に光軸方向と一致させることができるので、光源から出射され対物レンズ1を通じて被測定物W上に照射される光の照射位置が所期の照射位置Pからずれることがない。そのため、被測定物Wの表面形状が対物レンズ1の光軸に対して大きく傾斜している場合であっても、変位検出を正確にできる。
(もっと読む)
センサコイルの抵抗およびインダクタンス測定により層厚を無接触に突き止めるための方法
部品(17)の導電性材料から成る層(20)の厚さを無接触で突き止めるための方法において、コイル体(13)とコイル(14)とから成るセンサが測定すべき部品(17)の近傍に位置決めされる。この方法は誘導および渦電流原理の組み合わせに基づいている。コイル(14)に交流電流周波数fが供給されかつそのインダクタンスおよび抵抗値が評価される複数の測定および評価ステップにより、層(20)の厚さが突き止められる。その際コイル体(13)、従ってまたコイル(14)と部品(17)との距離は交流電流周波数fが供給されるコイル(14)の抵抗値Rから導出される。 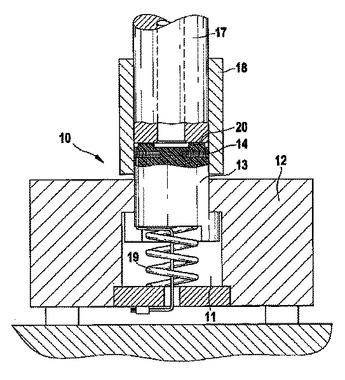 (もっと読む)
(もっと読む)
静電容量センサ
【課題】 容量変化率を大きくして、検出精度または感度の向上を図る。
【解決手段】 静電容量センサ10であって、行配線14に接続された検出行配線34と、 列配線17に接続された検出列配線37と、検出行配線34上を被覆する第1の誘電体層15と、検出列配線37上を被覆する第2の誘電体層16と、が設けられ、第1の誘電体層15の比誘電率よりも第2の誘電体層16の比誘電率のほうが大きく設定されてなる。
(もっと読む)
挟み込み防止システム
並進する装置によって物体が挟み込みされるのを防止するための挟み込み防止システムは、並進する装置に隣接して配置されたキャパシタンスセンサを含む。このセンサは、或る分離距離だけ隔てられた第1及び第2の可撓性導体を有する。この導体は、分離距離に依存するキャパシタンスを有する。センサは、これらの導体の間に介在する圧縮性誘電体要素を有する。導体のキャパシタンスは、第1の物体がセンサに接触するのに応じて誘電体要素が圧縮される結果として、分離距離が変化するのに応じて変化する。導体のキャパシタンスは、第2の導電性物体が少なくとも一方の導体に接近するのに応じて変化する。コントローラは、並進する装置が第1の物体又は第2の導電性物体のいずれかを挟み込みするのを防止するために、並進する装置を導体のキャパシタンスに応じて制御する。 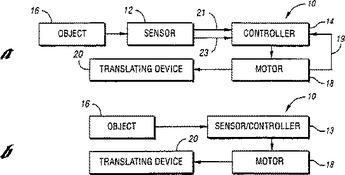 (もっと読む)
(もっと読む)
コンピュータスイッチ装置のライン長さ測定装置およびその方法
【課題】 ビデオ信号を伝送するのに用いる伝送ラインのライン長さを測定し、伝送ラインが少なくとも三本のサブラインを有するライン長さ測定装置を提供する。
【解決手段】 ライン長さ測定装置100は、信号合成回路102、信号変換回路106およびライン長さ計算回路108を少なくとも備える。ビデオ信号の垂直同期信号が有効なとき、信号合成回路102には電気信号がサブラインの一つへ重ねて入力される。信号変換回路206はサブラインにより伝送された後の電気信号を数値へ変換する。ライン長さ計算回路108は、数値を基にして伝送ライン104のライン長さを算出する。
(もっと読む)
厚さ及び電気伝導度の電磁気学的測定ための方法及びデバイス
本発明は、測定対象のオブジェクト(2)の、例えばその幾何学的寸法またはその電気伝導度などのような、被調査特性を、電磁誘導を使用して非接触式に決定するための方法に係る。この方法において、電磁場が、測定対象の前記オブジェクト(2)の一方のサイドに配置されたトランスミッタ・コイル(3)の中に発生され;測定対象の前記オブジェクト(2)を貫通する磁場が、測定対象の前記オブジェクト(2)のもう一方のサイドに配置されたレシーバ・コイル(4)により検出される。本発明は、下記工程を有している:コントロール・コイル(5)を、前記トランスミッタ・コイル(3)の近傍に配置する;前記トランスミッタ・コイル(3)の磁場の中に変化を発生させる;前記コントロール・コイル(5)の中の磁場の変化を検出する;前記レシーバ・コイル(4)の中の磁場を検出する;前記コントロール・コイル(5)の中と前記レシーバ・コイル(4)の中で、それぞれ磁場の変化が検出される時間の相違を決定する;測定対象の前記オブジェクト(2)を磁場が貫通する時間(T2)を決定する;その時間から、測定対象の前記オブジェクト(2)の厚さまたは電気伝導度を決定する。
 (もっと読む)
(もっと読む)
測定対象のオブジェクト厚さ及び電気伝導度を測定するための方法及びデバイス
本発明は、電磁誘導を使用して、導電性の測定対象のオブジェクトの寸法および/または電気的特性を、非接触式に測定するための方法に係る。この方法において、電磁場が、測定対象のオブジェクトを貫通するように発生される。本発明は、以下の方法ステップにより実現される;トランスミッタ・コイルを、測定対象のオブジェクトの一方のサイドに配置する;レシーバ・コイルを測定対象のオブジェクトのもう一方のサイドに配置する;磁場を、トランスミッタ・コイルの中に発生させる;トランスミッタ・コイルの中に発生させた磁場に、一つのレベルから他のレベルへの突然の変化を生じさせる;レシーバ・コイルの中に誘導される電圧を検出する;トランスミッタ・コイルの中での磁場が変化する時間T2から、レシーバ・コイルの中に電圧が誘導され始める時t1までに、経過した時間を決定する;誘導される電圧の強さを決定し、そして、測定対象のオブジェクトの厚さおよび/または電気伝導度を計算する。  (もっと読む)
(もっと読む)
部分硬化加工物の軟質ゾーン領域の幅を定量的に決定する方法
本発明は、少なくとも1つの硬化領域(2)および少なくとも1つの未硬化領域(3)を有する部分硬化金属加工物(1)の軟質ゾーン領域(3)の長さを、少なくとも1つの多周波渦電流センサ(4)によって、定量的に決定する方法に関する。加工物が、いつも分離されながら、多周波渦電流センサ(4)に対して移動され、それによって多周波渦電流センサ(4)で生成された渦電流場が空間的に範囲を定められて加工物(1)と無接触に相互作用し、加工物(1)に渦電流を引き起こし、この渦電流が、今度は、多周波渦電流センサ(4)に測定信号を生成し、それによって、空間的に範囲を定められた渦電流場が、加工物表面に対して長手方向に向けられかつ加工物表面に沿った軟質ゾーン領域(3)の最大延長(6)よりも大きな最も大きな延長部分を有していることを、本発明は特徴とする。さらに、n個の加工物の数が較正目的のために測定され、それによって、軟質ゾーン幅の所定の標準的な大きさ、すなわち加工物表面に対して長手方向に向けられた軟質ゾーン領域の延長部分の特定の大きさを想定して、n個の加工物の測定信号が、較正曲線を作るために使用される。最後に、較正曲線を基礎として利用しながら、絶対軟質ゾーン幅(b)は、各個々の加工物(1)から得られた測定信号に対応付けられる。 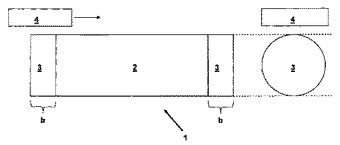 (もっと読む)
(もっと読む)
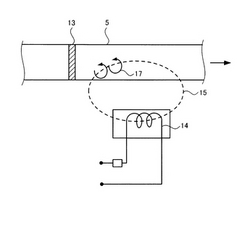
導電性の試験物体の位置を決定する測定装置及び方法
導電性の試験物体(1)の位置を非接触センサー、特に渦電流センサー(2)で決定する測定装置であって、前記試験物体(1)が所定の方向の直線往復運動に適合される測定装置において、前記試験物体(1)がマーキング(6)を備え、前記渦電流センサー(2)が該試験物体(1)の該運動方向に対し横方向にそして前記マーキング(6)の領域に前記試験物体(1)からある一定の距離に配置されて、該試験物体(1)の運動が、所定の測定範囲に亘り少なくとも略直線的に延在する信号変化を引き起こすことを特徴とする導電性の試験物体(1)の位置を決定する測定装置及び方法。 (もっと読む)
イン・シトゥー・プロファイル計測のための渦電流システム
渦電流モニタリングシステムは、細長いコアを含んでもよい。1つ以上のコイルを、ウェハ上の1つ以上の導電性領域に結合できる振動磁界を発生するために、該細長いコアに結合することができる。該コアは、改善された分解能を実現できると共に、十分な信号強度を維持するように、該ウェハに対して移動させることができる。渦電流モニタリングシステムは、共振周波数で振動磁界を発生するDC結合マージナル発振器を含んでもよく、この場合、該共振周波数は、1つ以上の導電性領域に対する変化の結果として変化させてもよい。渦電流モニタリングシステムは、リアルタイム・プロファイル制御を可能にするために用いることができる。 (もっと読む)
容量センサ
車体、詳細には、ヴァンのドア等の車体に装着するための容量センサである。該センサは、第1信号が印加されるセンサプレートを有する。第1保護プレートがセンサプレートと車体との間に介在し、第2保護プレートが第1保護プレートと車体との間に介在する。第1および第2保護プレートは、各々センサプレートに印加された第1信号と同じもしくは少なくとも類似している印加された信号を有する。このようにして、第2保護プレートは、第1保護部に対する後部保護として作用する。これにより、第1保護部によって引き込まれた電流が低減され、第1保護部が、センサ上の信号をより正確に探知し、結果として車体からセンサプレートをより良くマスクすることを可能にする。
【その他】 19条補正にて国際出願時の請求項29、31、32を削除し、請求項30を補正し新請求項29とした。 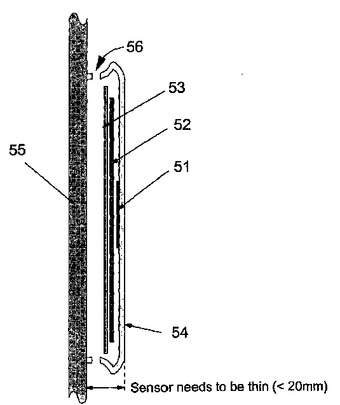 (もっと読む)
(もっと読む)
161 - 179 / 179
[ Back to top ]