
Fターム[2F063BB03]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 測定対象物の性質、材質 (622) | 磁性を有するもの (160)
Fターム[2F063BB03]に分類される特許
1 - 20 / 160
真空ポンプ
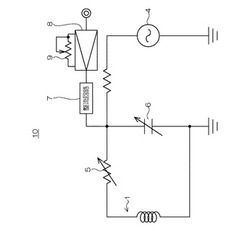
【課題】センサの取り付け位置調整をすることなく良好な計測信号を得ることが容易に可能な物理量計測装置、及び該物理量計測装置を備えた磁気浮上装置、真空ポンプを提供する。
【解決手段】コイルのインダクタンス変化によって振幅変調された高周波電圧に基づいて物理量を計測するセンサにおいて、コイルに被変調高周波電圧の周波数特性又は高周波電圧の周波数の可変手段を設けることによって、コイル又はそのコアの取り付け位置調整を必要とせずにセンサ感度の調整を可能にする。また、差動手段を設け、計測信号と調整可能な基準値信号の差を出力することにより、消費電力を低減し低飽和増幅器の採用を可能にする。更に、上記の調整手段を磁気軸受若しくは真空ポンプの機構部に配置することによって、機構部とコントローラの互換性を向上する。
(もっと読む)
静止誘導電器の中身変位検出装置

【課題】静止誘導電器を地震後に解体せずにタンク内の電器中身の変位状況を精度良く推定でき、使用可能性を判定できる静止誘導電器の中身変位検出装置を提供する。
【解決手段】タンク1内に、鉄心と巻線16a、16b、16cからなる変圧器中身10とを収納し、絶縁媒体を充填する変圧器に適用する中身変位検出装置である。この装置は、タンク1の長手方向と幅方向の側壁内面1a、1b、1c,1dの巻線16a、16b、16cと最も近接し、かつ巻線上端部及び下端部に対向する位置に漏れ磁束測定センサー2とそれぞれ取り付け、タンク1の幅方向或いは長手方向の側壁内面の対応する関係にある対となる漏れ磁束測定センサー2の漏れ磁束測定信号を漏れ磁束検出手段3で検出し、この漏れ磁束検出手段3からの漏れ磁束測定信号を基にしてタンク1内に収納した変圧器中身10の変位状況を判定する演算ユニット9を備えている。
(もっと読む)
ミラー角度検出装置
【課題】部品点数の増加を抑制できるミラー角度検出装置を提供する。
【解決手段】車体に取り付けられたブラケット15と、ブラケット15との間に収容室18を形成するホルダ16と、ホルダ16に設けられたピボット軸16aと、ミラーを支持し、かつ、ピボット軸16aに揺動可能に取り付けられたピボットプレート17と、垂直方向の平面内及び水平方向の平面内におけるミラーの角度を検出する角度検出機構25とを備えたミラー角度検出装置であって、角度検出機構25は、ピボットプレート17に取り付けられた永久磁石25aと、ホルダ16に取り付けられ、かつ、垂直方向の平面内におけるミラーの角度及び水平方向の平面内におけるミラーの角度を、永久磁石25aの磁界から検出する磁気センサユニット25bとを有し、永久磁石25a及び磁気センサユニット25bは、ピボット軸16aの中心線Aに沿って同軸上に配置されている。
(もっと読む)
モーションキャプチャ装置およびモーションキャプチャプログラム
【課題】被測定者の動作の制約が少ない状態で舌の動きを計測することができるモーションキャプチャ装置およびモーションキャプチャプログラムを提供する。
【解決手段】モーションキャプチャ装置1は、被測定者Mの舌表面に貼付される磁気ソース10と、被測定者Mの顔表面に貼付され、磁気ソース10によって形成される磁場を検出する磁気センサ40と、被測定者の顔表面に貼付された磁気センサ40と同一の位置に配置された光学マーカ41と、光学マーカ41を異なる位置および異なる方向から撮影する複数の撮影装置60と、磁気センサ40によって検出された磁場の大きさと、撮影装置60によって撮影された光学マーカ41の画像とから、被測定者Mの舌表面に貼付された磁気ソース10の絶対座標を算出する座標算出手段70と、からなる。なお、磁気ソース10と磁気センサ40の位置は入れ替えてもよい。
(もっと読む)
膜厚計測治具及び方法
【課題】検査対象物の角部の塗装膜厚を正確に計測することを可能にする塗装膜厚計測治具等を提供する。
【解決手段】塗装膜厚計測治具1は、検査対象物の検査対象部位である角部を挟む二面とそれぞれ当接する二つの当接部2a、2bを有する第1の部材2と、検査対象物の検査対象部位である角部の中心2dを軸として回動可能であり、電磁膜厚計のプローブPが挿嵌される二つの当接部2a、2bの交差部2dに連通する孔を有する第2の部材3と、を備える。
(もっと読む)
導電体センサ及び導電体の検出方法
【課題】少なくとも2つの導電体のそれぞれの位置を特定可能なセンサを提供する。
【解決手段】第1及び第2の磁界を放射する磁界放射器1と、第1及び第2の導電体に第1の磁界を照射した場合の、磁界放射器1の特性、第1及び第2の導電体の位置の第1の関係と、第2の磁界を照射した場合の、磁界放射器1の特性、第1及び第2の導電体の位置の第2の関係と、を保存する記憶装置401と、第1の測定対象導電体2及び第2の第1の測定対象導電体2に第1の磁界を照射した場合の磁界放射器1の特性及び第1の関係に基づき算出された、第1及び第2の導電体の位置の第3の関係と、第2の磁界を照射した場合の磁界放射器1の特性及び第2の関係に基づき算出された、第1及び第2の導電体の位置の第4の関係と、に共通する、第1及び第2の導電体の位置を特定する特定部303と、を備える導電体センサ。
(もっと読む)
位置検出装置
【課題】回路構成の簡素化に寄与することができる位置検出装置を提供する。
【解決手段】直列に接続される第1〜第4の二次コイル15a〜15dは、基板に直交する特定の軸回りに90°間隔で設けた。そして、これら二次コイル15a〜15dに対して、時間的な位相を互いに90°ずらして励磁するようにした。また、各二次コイル15a〜15dに発生するアナログ電圧の和である合成信号を、単一のA/D変換器21で取り込むようにした。A/D変換器21の取り込みタイミングとして、特定の二次コイルに発生する電圧が最大になる第1のタイミング、および、第1のタイミングにおける前記電圧の位相が時間的に90°ずれる第2のタイミングをそれぞれ設定した。第1および第2のタイミングでA/D変換器に取り込まれる合成信号のデジタル値の組み合わせに基づき、検出対象の位置を求めるようにした。
(もっと読む)
ステアリングシャフト回転角度検出装置
【課題】ステアリングシャフトの回転角度を高分解能で検出でき、かつ構造が簡便なステアリングシャフト回転角度検出装置を提供すること。
【解決手段】ステアリングホイール1の操作に伴って回転するステアリングシャフト2の回転角度を検出するステアリングシャフト回転角度検出装置100であって、ドライバによるステアリングホイール1の操舵を補助する電動モータ10と、電動モータ10の回転をステアリングシャフト2に減速して伝達する減速機構11と、電動モータ10の回転軸に取り付けられた回転体21と、回転体21の回転に伴い信号を出力する信号出力器22と、信号出力器22の出力信号に基づいて回転体21の回転角度を演算し、回転角度21と減速機構11の減速比とに基づいてステアリングシャフト2の回転角度を演算するコントローラ13とを備える。
(もっと読む)
車両変速機用操作装置
【課題】検出手段の数を少なくできる車両変速機用操作装置を得る。
【解決手段】シフトレバー20と一体に移動する銅片112と鉄片114がセレクト操作方向に互いに対向して設けられており、この銅片112と鉄片114との間に近接センサ82〜90の検出コイル84〜92がシフト操作方向に並んだ状態で設けられている。シフトレバー20を左側シフト孔62側へセレクト操作すると銅片112が検出コイル84〜92に接近し、右側シフト孔64側へセレクト操作すると鉄片114が検出コイル84〜92に接近する。銅片112や鉄片114が検出コイル84〜92に接近すると、検出コイル84〜92の周囲に形成される高周波磁界が変化するが、銅片112が検出コイル84〜92に接近した場合と鉄片114が検出コイル84〜92に接近した場合とでは高周波磁界の変化が異なるため、少ない近接センサ82〜90で多くのシフトレバー20の位置を検出できる。
(もっと読む)
回転機械用物理量測定装置
【課題】エンコーダ1aと組み合わせて使用するセンサ10、10の個数を、3個のみと、少なくした状態で、前記エンコーダ1aを外嵌固定した回転部材の5方向の変位x、y、z及び傾きφx、φzを測定できる構造を実現する。
【解決手段】前記エンコーダ1aとして、被検出面である外周面に、複数の特性変化組み合わせ部3a、3aを円周方向に等ピッチで形成したものを使用する。これら各特性変化組み合わせ部3a、3aは、前記エンコーダ1aの軸方向に対して互いに逆方向に傾斜した第一凹溝11a及び第二凹溝11bから成るものとする。前記エンコーダ1aの外周面のうちで円周方向の位相が互いに異なる部分に、3個のセンサ10、10の検出部を対向させる。これにより、これら各センサ10、10の出力信号から得られる情報に基づいて、前記5方向の変位x、y、z及び傾きφx、φzを算出可能とする。
(もっと読む)
渦流計測用センサ及び渦流計測方法
【課題】外径が大きく変化したり、凹部を有したりするような高周波焼入れ部品を検査する場合であっても高い検出精度で焼入れ深さ測定試験を行うことができ、また、焼入れ深さの計測にあたってリフトオフの影響を排除することで計測精度を向上させることが可能となる、渦流計測用センサ及び渦流計測方法を提供する。
【解決手段】渦流計測用センサは、励磁コイル51が計測部位であるフィレット部Fと交差しない方向に向けた軸心を中心として巻回されており、励磁部51aは、励磁コイル51の一部において、励磁部51aの水平方向面がアームAに対向し、下側面がジャーナル部Jに対向するように、励磁コイル51をフィレット部Fに対向して配置した際に、励磁部51aの外形形状がフィレット部Fの形状と略同一となるように形成されている。
(もっと読む)
位置検出装置
【課題】被検出体の板厚が徐々に変化する変化部を容易に加工や製品検査を実施することが可能な位置検出装置を提供する。
【解決手段】ハンドルバー1に設けられたハンドルグリップ3の回動動作に基づいて回動するマグネット4aと、マグネット4aの回転を検出する磁気検出手段5とを備えた位置検出装置1において、マグネット4aは、その外面4bと内面4cに曲面を備えた板状部を備え、外面4bと内面4cの形状の少なくとも一部はマグネット4aの回転軸方向に対して垂直方向の断面形状が円弧形状であり、外面4bの円弧形状の中心を第1の中心4dとし、内面4cの円弧形状の中心を第2の中心4eとし、第1の中心4dと第2の中心4eとを異なる位置とし、マグネット4aの板状部に肉厚部4fと肉薄部4gとを設けたものである。
(もっと読む)
地中障害物磁気探査方法
【課題】シールド掘進機による掘削前に、該シールド掘進機の進路における地中障害物の有無を、構造簡単且つ低コストで探査する。
【解決手段】検知可能半径rの磁気センサーを用い、シールド掘進機のシールド筒体内から、該シールド掘進機の進行方向の地盤に長尺な棒を挿入可能な探査孔を2以上の複数箇所に形成し、且つ、前記複数の探査孔を、それぞれ少なくとも1つの他の探査孔との距離Rが、r<R<2rを満たすように形成し、1つの前記探査孔に、先端に前記磁気センサーを取り付けた長尺な探査棒を挿入して行う先の磁気探査工程と、前記先の磁気探査工程の後に、前記探査棒を、先の磁気探査工程を行った探査孔から距離Rの位置の地盤に形成された他の探査孔に挿入して行う後の磁気探査工程とを行い、前記先の磁気探査工程と後の磁気探査工程の結果から、前記地中障害物の位置を判断する位置検知工程を有する地中障害物磁気探査方法。
(もっと読む)
バルブ制御装置
【課題】 アクチュエータのロッド4の軸振れ幅、つまり磁性移動体7の振れ幅の違いによるストロークセンサの出力値の差を低減して、ロッド4のストローク量の検出精度を向上することを課題とする。
【解決手段】 ウェイストゲートバルブ制御装置においては、ホール素子の感磁面を、磁性移動体7の中心を通り、且つ第1直線AOA’に平行な第1仮想直線LAと、磁性移動体7の中心を通り、且つ第2直線BOB’に平行な第2仮想直線LBとの交差角度の範囲内において、第1直線AOA’に平行な第1仮想直線LAと第2直線BOB’に平行な第2仮想直線LBとの交差角度の中心線(∠AOBの角度中心線LX)上に配置したことにより、ホール素子の感磁面に対する磁束密度(磁界の強さ)の変化を小さくすることができる。これにより、ロッド4の軸振れを要因とするストロークセンサの出力値の差を低減できる。
(もっと読む)
歯車伝達装置用物理量測定装置
【課題】歯車伝達装置を構成する歯車4aの変位方向及び変位量を測定して、この歯車伝達装置が伝達するトルクの方向及び大きさを測定可能な構造を実現する。
【解決手段】1対のセンサ7a、7bの検出部を、はすば歯車であって他の歯車と噛合した前記歯車4aの外径側端部に形成した歯5aに対し、径方向及び軸方向に、それぞれ対向させる。この歯車4aは、トルク伝達に伴って軸方向に変位する。そして、前記センサ7a、7bの出力信号同士の間に存在する位相差が、前記歯車伝達機構が伝達するトルクの方向及び大きさにより変化する。そこで、この位相差に基づいて、このトルクを求める。
(もっと読む)
回転部材用物理量測定装置
【課題】工作機械の主軸が高速回転する状態での検出分解能及び測定精度の確保と、同じく低速回転する状態での応答性の確保との両立を図る。
【解決手段】演算器は、円周方向に隣り合う1対の凹溝10a、10bに基づいて発生する1対のパルス間の周期である部分周期δと、互いに異なる1対の被検出用特性変化組み合わせ部3a、3aに対応する1対のパルス間の周期である全周期Lとの比であるパルス周期比δ/Lに基づいて、前記主軸の軸方向変位量を求める。この主軸の回転速度が所定値よりも低い場合に、(A)に示す様に、前記全周期Lとして、円周方向に隣り合う1対の被検出用特性変化組み合わせ部3a、3aに関する値Laを採用する。これに対して、前記回転速度が前記所定値以上である場合に、(B)に示す様に、前記全周期Lとして、中間を飛ばして存在する1対の被検出用特性変化組み合わせ部3a、3aに関する値Lbを採用する。
(もっと読む)
電子機器
【課題】 ヒンジ機構により開閉可能に支持された第1の筐体及び第2の筐体の開閉を磁場を用いて検出する電子機器において、磁場発生手段と磁場検出手段とを対向する位置に配置しなくても正確に開閉を検出できるようにする。
【解決手段】 カメラ本体と可動部とを閉じた状態において、可動部に設けられた磁石とカメラ本体に設けられたホール素子とが対向しない位置に、磁石の着磁方向とホール素子の磁場検出方向とが略直交するように磁石とホール素子を配置する。
(もっと読む)
バルブ制御装置
【課題】磁性移動体、特に磁石から放出される磁界の磁束が周囲に漏れるのを抑制することで、ストロークセンサの感磁面に印加される磁界の磁束の量(磁束密度)が減少するのを防止する。
【解決手段】ウェイストゲートバルブ制御装置においては、ストロークセンサSのホール素子の感磁面Fに対して垂直方向で、且つ磁性移動体7の外形線で囲まれた領域をこの垂直方向に投影した投影部に、ストロークセンサSに対して磁気的障害を与える外部磁性体や外部磁石等の配置を防止するための雄側のコネクタハウジング8を設置している。そして、雄側のコネクタハウジング8の外形線で囲まれた領域をこの垂直方向に投影した範囲内に磁気回路(磁性移動体7およびストロークセンサS)を設置している。これにより、磁気回路の周囲(近傍)に、外部磁性体や外部磁石等が配置されることが阻まれる。
(もっと読む)
ポジションセンサ
【課題】対象物の変位に対する検出コイルのインダクタンスの変化の直線性を向上させることのできるポジションセンサを提供する。
【解決手段】各誘電体基板1,2の表面に印刷形成された検出コイルCoと、検出コイルCoと対向して配置されるとともに対象物の変位と連動して検出コイルCoに対して円周軌道上を変位する検出体30a,30bと、検出体30a,30bの変位に応じて変化する検出コイルCoのインダクタンスに基づいて対象物の変位を検出する検出部とを備え、検出コイルCo又は検出体30a,30bのうち少なくとも何れか一方を、検出体30a,30bの変位に対する検出コイルCoのインダクタンスの変化率が一定となる形状に形成した。
(もっと読む)
移動する構成要素の位置を磁気的に感知するシステムおよび方法
【課題】ロッドの強度に悪影響をもたらさず、磁気的に符号化された信号が消去されることのないピストンロッド感知システムを提供する。
【解決手段】ピストンロッド上の磁気的硬質層の領域の複数のトラック上に情報が磁気的に記録されている。磁場センサーが、磁気的に記録された領域の複数トラックに配置されている。複数トラックに配置された各磁場センサーは、ピストンロッドがシリンダに対して動く間、同一の磁化領域を感知する。別の磁場センサーは、同相除去を実施する際に使用する周囲場を感知することができる。書込みヘッドが、磁場センサーによって検出された損傷または消去された領域を動的に修復することができる。磁気的に記録された情報は相対符号化されている。バッテリーバックアップ電源によって活性化されて、磁場センサーと関係する回路は、機械装置がオフの間に引き続いてピストンロッドの動きを追跡することができる。
(もっと読む)
1 - 20 / 160
[ Back to top ]