
Fターム[2F063BD20]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 測定対象物の測定したい部分,その他の特徴 (463) | 特定されたその他のもの (8)
Fターム[2F063BD20]に分類される特許
1 - 8 / 8
電子機器
【課題】 ヒンジ機構により開閉可能に支持された第1の筐体及び第2の筐体の開閉を磁場を用いて検出する電子機器において、磁場発生手段と磁場検出手段とを対向する位置に配置しなくても正確に開閉を検出できるようにする。
【解決手段】 カメラ本体と可動部とを閉じた状態において、可動部に設けられた磁石とカメラ本体に設けられたホール素子とが対向しない位置に、磁石の着磁方向とホール素子の磁場検出方向とが略直交するように磁石とホール素子を配置する。
(もっと読む)
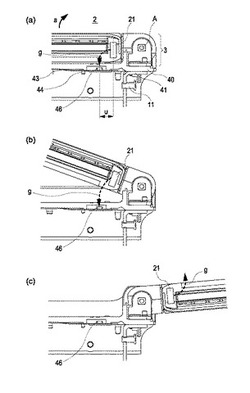
構成部品内の歪みの測定装置

円筒状構成部品の直径に垂直な薄板内の直径の変化によって影響を与えられる、折り曲げ(圧縮および引張)を監視および測定することによって、円筒状構成部品内の直径の変化を測定するための装置および方法が開示される。該方法に影響を与える装置は、少なくとも1つのウェブを備えるが、通常、円筒状構成部品の直径に垂直な薄板を画定し、ウェブ薄板上に装着された要素を測定する歪み、歪み計測器が装着されたウェブの圧縮および引張(折り曲げ)行為を検知し測定するように配置された2つのウェブを備える。 (もっと読む)
インデックスセンサ
【課題】ステアリングシャフトの回転により大きな磁束密度の変化を発生させ、十分なマージンを有するインデックスセンサを提供する。
【解決手段】ステアリングシャフトと、前記ステアリングシャフトの回転基準位置の検出に用いられる磁束を発生させる磁石と、前記磁石からの磁束密度を検出する磁気センサとを備え、前記磁石からの磁束密度の変化に基づき前記ステアリングシャフトの回転基準位置を検出するインデックスセンサにおいて、前記磁石と前記磁気センサは、前記ステアリングシャフトが回転基準位置にあるとき、前記磁石の極軸と前記磁気センサの検出軸とが、xy平面視またはxz平面視において交差するように設けられていることを特徴とする。
(もっと読む)
ナゲット径測定方法およびナゲット径測定装置
【課題】スポット溶接された鋼材におけるナゲットの径を簡易に、しかも精度良く非破壊検査することのできるナゲット径測定方法を提供する。
【解決手段】一対の電流電極針および一対の電圧電極針を備えた探針プローブを用いてスポット溶接された鋼材の表面を所定のラインに沿って走査し、この走査に伴って前記一対の電圧電極針により検出される電圧変化のプロフィールから、その電圧が前記鋼材におけるスポット溶接領域を外れた部位での検出電圧を超える2つの特異点を検出し、これらの特異点を検出した走査位置から前記スポット溶接により前記鋼材に形成されたナゲットの径を求める。
(もっと読む)
軸受状態検査装置および軸受状態検査方法
【課題】 回転側輪や転動体に対して非接触の状態で、転がり軸受における潤滑膜の状態を推定できると共に、スリップリング等の電気接点を用いることなく、油膜厚さ等の測定を簡単に行うことができ、装置全体の組立を簡単に行うことができる軸受状態検査装置および軸受状態検査方法を提供する。
【解決手段】 内輪3に取付けられこの内輪3に対して電気的に導通した導電性の回転リング8と、外輪2に取付けられた固定側ユニット13とを備え、この固定側ユニット13は、回転リング8に静電容量発生用の隙間を介して対向し外輪2に対して電気的に非導通の固定リング9と、この固定リング9に対して電気的に絶縁されかつ外輪2に対して電気的に導通した金属部材12とを有する。
(もっと読む)
転動装置部品の検査方法および検査装置
【課題】転動装置部品の表層部に形成された浸炭層、浸炭窒化層等の表面硬化層の深さを精度よく検出することのできる転動装置部品の検査方法を提供する。
【解決手段】転動装置部品の表層部に形成された表面硬化層の深さを測定する手段として電磁誘導センサ11を用い、電磁誘導センサ11の誘導コイル11bに発生した誘導起電力に基づいて表面硬化層の深さを測定するようにした。
(もっと読む)
操舵角検出装置
【課題】 イグニッションスイッチが抜かれたときに操舵軸の絶対舵角や中立位置を記憶する必要がない操舵角検出装置を提供する。
【解決手段】 操舵ハンドルを左操舵限界位置−θmaxから右操舵限界位置+θmaxにまで操舵したときにn回の周期波形信号を出力する第1レゾルバセンサと、(n+1)回の周期波形信号を出力する第2レゾルバセンサと、(n+2)回の周期波形信号を出力する第3レゾルバセンサとを備え、第3レゾルバセンサで得られる相対角θcと第2レゾルバセンサで得られる相対角θbの相対角差θcbと、第3レゾルバセンサで得られる相対角θcと第1レゾルバセンサで得られる相対角θaの相対角差θcaとに基づいて絶対舵角θと中立位置とを算出する。
(もっと読む)
フレキシブルセンサチューブ
【課題】
瓦礫内探索ロボットが瓦礫に埋もれた人を発見した場合に、その位置を正確に把握することを目的とする。
【解決手段】
瓦礫内探索ロボットが外部の空気コンプレッサーから空気圧チューブやCCDカメラ等の信号情報ケーブルで結ばれる必要性があることに鑑み、瓦礫内探索ロボットと外部の空気コンプレッサーとを結ぶ空気圧チューブやロボットに取り付けられたCCDカメラ等の信号情報ケーブルを多関節構造のチューブで覆い、各関節角をポテンショメータ等のセンサにより検出し、そのセンサの出力信号から多関節構造のチューブの全体形状を算出することにより、多関節構造のチューブの先端部に位置する瓦礫内探索ロボットの位置を同定する。
(もっと読む)
1 - 8 / 8
[ Back to top ]