
Fターム[2F063CA02]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 目的 (1,548) | 測定系の異常検出 (90)
Fターム[2F063CA02]の下位に属するFターム
断線検出 (6)
Fターム[2F063CA02]に分類される特許
1 - 20 / 84
回転角検出装置、及びトルクセンサ
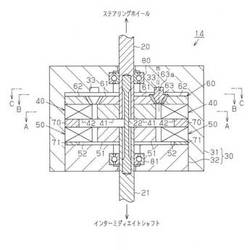
【課題】回転体の多回転の絶対回転角を検出することが可能でありながらも、構造の簡素化を図ることのできるトルクセンサを提供する。
【解決手段】このトルクセンサ14では、第1のレゾルバ40を通じて検出されるインプットシャフト20の回転角度と、第2のレゾルバ50を通じて検出されるロアシャフト21の回転角度との差分値に基づいてステアリングホイールに付与された操舵トルクを演算する。ここでは、インプットシャフト20と一体となって回転する太陽歯車61、磁性体により形成されて太陽歯車61の周囲を公転する遊星歯車63、及び遊星歯車63が噛合される内歯車62により構成される遊星歯車機構60を設ける。そして、第1のレゾルバ40から出力される電圧信号に基づいてインプットシャフト20の回転角及び遊星歯車63の位置を検出し、それらに基づいてステアリングホイールの操舵角を求める。
(もっと読む)
回転角度検出装置及びこれを用いた回転角度検出システム

【課題】主に自動車のステアリングの回転角度検出等に用いられる回転角度検出装置、及びこれを用いた回転角度検出システムに関し、簡易な構成で、確実な回転角度の検出が可能なものを提供することを目的とする。
【解決手段】回転角度検出装置13と13Aの制御手段12と12Aが、算出した回転角度を各々異なる所定時間後に出力すると共に、これらを接続し、他からの回転角度を検知した場合には、回転角度を出力しないように形成することによって、複数の回転角度検出装置13や13Aを用いた場合でも、車両の電子回路11には一つの回転角度の信号しか入力されないため、電子回路11の負荷が少なくなると共に、万が一、一方に故障等が生じた場合でも、他方からは回転角度が出力されるため、簡易な構成で、確実な回転角度の検出が可能なものを得ることができる。
(もっと読む)
シフト位置検出装置
【課題】車両用変速装置のシフト位置を、シフト位置に応じた接点を変えることによって検出する場合に、接点間の短絡故障を検知でき、シフト位置数の増加を容易にする。
【解決手段】シフト位置検出装置1は、シフト位置(P/R/N/D)に応じた接点SWに抵抗RとコンデンサCとを直列接続した回路を並列に接続する時定数設定部20を備え、各回路の時定数が異ならせてある。PNP型トランジスタTr1がONとなって接続点16から電圧Vccが時定数設定部20に印加されたとき、シフト位置判定部13が、観測点Bの電圧を取得して時定数を検出し、検出した時定数に対応するシフト位置を判定する。また、短絡検知部12は、電圧Vccが印加された際に、観測点Bにおける上流抵抗R1と時定数設定部20の合成抵抗との分圧比(または分圧電圧)を検出し、短絡していない正常時の分圧比(または分圧電圧)と比較することによって、短絡事故を検出する。
(もっと読む)
回転情報算出装置、ステアリング装置、電動パワーステアリング装置、センサ付き軸受装置、車両、異常検出装置、回転情報算出方法及び異常検出方法
【課題】3相の磁気検出器の磁気検出信号の異常を検出することが可能であり、異常発生後も、3相中の2相の磁気検出信号が正常な場合に、継続して回転情報の計算を正確に行うことが可能な回転情報算出装置を提供する。
【解決手段】3相の磁気検出信号のサンプリング値a、b、cを取得し、取得したサンプリング値に基づいて、各相に対する回転角度位置を算出する。そして、これら算出した回転角度位置に基づき各相のサンプリング値の異常を検出するとともに、1相のサンプリング値のみに異常が検出されたときは、異常検出フラグを出力すると共に残りの2相のサンプリング値で回転角度位置の算出を行う。2相以上のサンプリング値の異常が検出されたときは、回転情報算出装置の動作を停止する。また、正常な相のサンプリング値に基づいて算出した回転角度位置の平均値を出力用の回転角度位置として算出する。
(もっと読む)
ポジションセンサ
【課題】小型化を図ることが可能なポジションセンサを提供すること。
【解決手段】ポジションセンサは、磁束を発生する磁石10及びその磁石10に対向して配置され同磁石10による磁束を検出するホールIC21〜23を備える。磁石10は、第1の直線に沿って移動されることで、その移動距離に対する磁束密度の変化が比例関係となる第1の着磁領域10Aを有する。また、磁石10は、第2の直線に沿って移動されることで、その移動距離に対する磁束密度の変化が上記比例関係とは傾き正負逆の比例関係となる第2の着磁領域10Bを有する。各ホールIC21〜23による検出電圧は、シフトレバーが第1の直線上の操作ポジションにある場合と、シフトレバーが第2の直線上の操作ポジションにある場合とで、大小関係が逆になる。
(もっと読む)
ポジションセンサ
【課題】小型化を図ることが可能なポジションセンサを提供すること。
【解決手段】ポジションセンサは、磁束を発生する磁石10及びその磁石10に対向して配置され同磁石10による磁束を検出するホールIC21〜23を備える。磁石10は、シフトレバーの操作に伴い、所定の直線に沿って移動されることで、その移動距離に対する磁束密度の変化が比例関係となる着磁態様を有する。シフトレバーの操作に伴い、磁石10が各ホールIC21〜23の設けられる直線に対し交差するかたちで直線運動されると、両直線のなす角度毎に、各ホールIC21〜23による検出信号の出力差が一義的に決まる。
(もっと読む)
位置検出装置
【課題】 特に、従来に比べてコストを抑えるとともに信頼性に優れた位置検出装置を提供することを目的とする。
【解決手段】 シフトレバー2と、シフトレバー2の上端部に設けられたシフトノブ10と、下端部に設けられた電極部21と、シフトレバー2を回動可能に支持する動作支点25と、電極部21と非接触にて配置された静電容量結合型センサ20と、を有する。シフトノブ10の移動操作によりシフトレバー2が回動して電極部21が前記静電容量結合型センサ20の表面を非接触を保って移動し、静電容量結合型センサ20では、電極部21の移動に伴う静電容量変化に基づいて、電極部21の位置を検出する。これによりシフトポジション情報及び各シフトポジション間の軌跡情報を取得することができる。
(もっと読む)
磁気式回転角検出装置及びブレーキバイワイヤ型制動制御装置
【課題】磁気式回転角検出装置に外乱磁界が作用して回転角検出誤差を生じる状態を的確に判定すること。
【解決手段】回転軸52の回転に伴って回転変位する磁石54と、磁石54の回転面に平行な面上に互いに直交方向する軸線方向に沿って配置され、90度の回転位相をもって磁石54の磁気強度を検出する2個の磁気検出素子58、・60と、磁気検出素子58、60により検出される磁気強度を合成した合成ベクトルに基づいて回転軸52の回転角を算出する回転角算出部62とを備えた磁気式回転角検出装置において、前記合成ベクトルの値と予め定められた閾値とを比較し、前記合成ベクトルの値が前記閾値を超えれば、異常を判定する異常判定部64を設ける。
(もっと読む)
インダクタンス式回転角度検出装置及びそれを備えたモータ駆動式の絞り弁制御装置
【課題】スロットルセンサロータと微小な空間を隔てて設けられたスロットルセンサ基板回路に接続されたターミナルに静電気を与えた際、静電気がスロットルセンサ基板回路とスロットルセンサロータ間の微小な空間を介し、スロットルセンサロータ,スロットルシャフト側に放電することにより電流が生じ、スロットルセンサ基板回路が破損してしまう。
【解決手段】スロットルセンサロータ搭載位置を樹脂製の中間ギア上に設けることで、金属製スロットルセンサロータを樹脂にて金属製部品と絶縁する。
【効果】スロットルセンサロータを前記中間ギア上に設けることで、スロットルセンサ基板回路から金属製スロットルセンサロータを介しスロットルセンサロータが接触している他の部品への放電を防ぐことができ、電流発生により生じるスロットルセンサ基板回路の破損を防ぐことができる。
(もっと読む)
変位量検出装置
【課題】変位センサの電気的失陥と機構的失陥とを、故障検知方法やシステムを複雑化することなく簡便且つ正確に検出すること。
【解決手段】センサ軸24は連結部34によるペダル10との機械的な連結を解かれた状態ではセンサ本体22に対して正常時の相対変位レンジを超える位置に変位する設定になっており、センサ出力値が前記相対変位レンジにおける最大値より大きい所定の上限設定値を上回った場合、あるいは前記出力値が前記相対変位レンジにおける最小値より小さい所定の下限設定値を下回った場合には異常判定を行う電気的異常判定手段と、センサ出力値が前記相対変位レンジにおける最大値より所定量大きい設定値を上回った場合、あるいは前記出力値が前記相対変位レンジにおける最小値より所定量小さい設定値を下回るった場合には異常判定を行う機構的失陥異常判定手段とを設ける。
(もっと読む)
回転角度センサのフェール検知装置
【課題】被検知体に対応する回転角度センサがひとつであっても、回転角度センサのフェールを確実に検知できる回転角度センサのフェール検知装置を提供する。
【解決手段】カム25を、電動モータ1によって一方向に回転駆動されてプッシュロッド35を往復動作するように構成し、角度センサ21の出力電圧Sは、第1の所定電圧V1以下の領域および第1の所定電圧V1より大きい第2の所定電圧V2以上の領域が不感帯Dとして認識する。プッシュロッド35と当接するカム25のカム面を作動面側から非作動面側に移行させる際に、非作動面の所定位置まで一定速度でカム25を回転駆動させる。カム25の非作動面内でかつ所定位置までの間の位置に不感帯Dを配設する。不感帯Dに移行後の経過時間をタイマ54で計測し、不感帯Dの通過予定時間が経過したにもかかわらず不感帯Dに対応する出力電圧Sが検知された場合にフェール状態と判定する。
(もっと読む)
位置検出装置及び位置検出方法
【課題】温度特性のバラツキを解消し、縦方向のガタツキによる誤差をなくすようにした位置検出装置及び位置検出方法を提供すること。
【解決手段】ホール素子(22a)のホール電圧Vhe1は、A・K・Bhe1(Aはプレアンプ(32)の増幅率、Kは定数、Bhe1はホール素子が受ける磁束密度)になったとすると、PIレギュレータ(41)はフィードバック制御によってA・K・Bhe1+Vref=AGND(=0)になるように、PI出力のバイアス点を自動的に変化させる。増幅後のホール素子(22b)のホール電圧Vhe2はA・K・Bhe2となる。K=−Vref/A・Bhe1であるから、ホール素子のホール電圧Vhe2は、−Vref・Bhe2/Bhe1となる。ホール電圧は、磁束密度と比例するので、ホール素子(22a)とホール素子(22b)の出力電圧を割り算していることと等価である。
(もっと読む)
回転角検出装置
【課題】複数のセンサの出力信号うちの1つの出力信号に異常が発生した場合に、異常が発生した出力信号を特定できるとともに、正常な他の出力信号に基づいて正確な回転角を演算することが可能となる回転角検出装置を提供する。
【解決手段】回転角演算装置20は、第1の回転角演算部21、第2の回転角演算部22、第3の回転角演算部23、異常監視部24および最終回転角演算部25を含む。異常監視部24は、第1、第2および第3の出力信号V1,V2,V3に基づいて、各出力信号V1,V2,V3が正常であるか異常であるかを判定する。最終回転角演算部25は、異常監視部24の最終判定結果と、第1、第2および第3の回転角演算部21,22,23によってそれぞれ演算された第1、第2および第3の回転角θ1,θ2,θ3に基づいて、最終的な回転角θを演算する。
(もっと読む)
位置検出装置
【課題】電源電圧が低下した場合の挙動仕様を共通にすることの可能な位置検出装置を提供する。
【解決手段】ホール素子の電圧信号を処理する信号処理回路から出力された電圧信号がバッファアンプ65によって緩衝増幅され、出力端子41を通じてECUに伝送される。電流検出回路67は出力端子41を流れる電流の向きを検出する。電源電圧検出回路68はホールICに供給される電源電圧の低下を検出する。電源電圧が低下したことを示す信号が電源電圧検出回路68から出力されると、電圧切替回路69は、出力端子41からECUに出力される電圧信号を電流検出回路67の検出した電流の向きに応じて高電圧側又は低電圧側にする。これにより、ECUの受け回路に設けられたプルアップ抵抗又はプルダウン抵抗に対応する電圧信号がECUに出力される。
(もっと読む)
回転角度検出装置
【課題】主に自動車のブレーキペダル等の回転角度検出に用いられる回転角度検出装置に関し、簡易な構成で、確実な回転角度の検出とストップランプの消点灯等が可能なものを提供することを目的とする。
【解決手段】磁石16の回転中心に対して所定角度間隔で、複数の磁気検出素子18Aと18Bを対向配置すると共に、磁気検出素子18Aと18Bからの検出信号L1とL2を加算または減算して回転角度を検出する第一の制御回路19と、検出信号L1とL2を除算した後、逆関数に変換して回転体12の回転角度を検出する第二の制御回路21と、印加された電圧に応じて、第一の制御回路19と第二の制御回路21のいずれを動作させるか切換えるスイッチング回路24を備えることによって、簡易な構成で、確実な回転角度の検出とストップランプの消点灯等が可能な回転角度検出装置27を得ることができる。
(もっと読む)
回転角度検出装置
【課題】主に自動車のブレーキペダル等の回転角度検出に用いられる回転角度検出装置に関し、簡易な構成で、確実な回転角度の検出とストップランプの消点灯等が可能なものを提供することを目的とする。
【解決手段】回転体12に装着された磁石16の回転中心に対して、所定角度間隔で複数の磁気検出素子18Aと18Bを対向配置すると共に、制御回路19が複数の磁気検出素子18Aと18Bからの検出信号L1とM1を加算または減算し、演算信号N1やP1から回転体12の回転角度を検出することによって、高精度な回転角度の検出が行えると共に、簡易な構成で、確実な回転角度の検出と、ストップランプの消点灯等が可能な回転角度検出装置を得ることができる。
(もっと読む)
センサ異常判定装置
【課題】ストロークセンサの異常を適切に判定できるセンサ異常判定技術を提供する。
【解決手段】第1監視部102は、非接触式の第1ストロークセンサ46aの第1出力電圧を監視する。第2監視部104は、非接触式の第2ストロークセンサ46bの第2出力電圧を監視する。異常判定部122は、監視結果を受け取り、第1ストロークセンサ46aまたは第2ストロークセンサ46bに異常が生じたか否かを判定する。判定制御部124は、異常判定部122による判定処理の実行を制御する。第1監視部102には、監視可能な上限監視電圧V1が設定されている。第1電圧判定部126は、第1出力電圧が上限監視電圧V1以上となる可能性があるか否かを判定し、可能性があれば、判定制御部124が、異常判定部122による判定処理を停止する。
(もっと読む)
回転角検出装置、および、これを用いた電動パワーステアリング装置
【課題】中間値固着異常が生じていることを適切に判断することができる回転角検出装置、および、これを用いた電動パワーステアリング装置を提供する。
【解決手段】回転角検出装置10の制御部50は、ハーフブリッジ14〜17から出力される出力信号Vx1、Vx2、Vy1、Vy2を、ハーフブリッジ14〜17毎に取得する。制御部50は、取得された出力信号Vx1、Vx2、Vy1、Vy2に基づき、被検出部87の回転角度θを算出する。制御部50は、取得された出力信号Vx1、Vx2、Vy1、Vy2に基づいて算出される演算値C1またはC4に基づき、演算値C1またはC4の算出に用いた出力信号Vx1、Vx2、Vy1、Vy2に中間値固着異常が生じているか否かを判断する。これにより、中間値固着異常が生じているか否かを適切に判断することができる。
(もっと読む)
バルブポジショナ
【課題】故障等に対応可能で、高い信頼性を示すバルブポジショナを提供する。
【解決手段】異常検出手段は、第2の信号に基づいて第2の変位センサの異常を検出する。算出手段は、異常検出手段により第2の変位センサの異常が検出されない場合には、第1の信号および第2の信号に基づいてバルブの位置を算出し、異常検出手段により第2の変位センサの異常が検出された場合には、第1の信号のみに基づいてバルブの位置を算出する。
(もっと読む)
回転角検出装置、および、これを用いた電動パワーステアリング装置
【課題】高精度に被検出部の回転角度を検出可能な回転角検出装置、および、これを用いた電動パワーステアリング装置を提供する。
【解決手段】回転角検出装置10のブリッジ回路部11、12は、被検出部の回転に応じて変化する回転磁界を感知し被検出部の回転角度に応じてインピーダンスが変化するセンサ素子21〜28により構成される複数のハーフブリッジ14〜17を有する。制御部51は、複数のハーフブリッジ14〜17から出力される出力信号をハーフブリッジ14〜17毎に取得し、位相ずれαを補正するための位相補正値φを算出する。メモリ部52は、位相補正値φを記憶する。制御部51は、位相補正値φに基づき、補正前回転角度θを補正する。これにより、位相補正値φに基づいて補正前回転角度θを補正するので、センサ素子21〜28の実装ずれ等があっても、高精度に被検出部の回転角度δを算出することができる。
(もっと読む)
1 - 20 / 84
[ Back to top ]