
Fターム[2F063CA04]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 目的 (1,548) | 計数ミス防止 (11)
Fターム[2F063CA04]に分類される特許
1 - 11 / 11
位置検出構造
【課題】基体48に対して相対移動する移動物体20における互いに離れた2位置への移動を検出する位置検出構造において、互いに離れた2位置への移動物体の移動を単一のセンサで、誤検出なく区別して検出する。
【解決手段】基体(ホルダ)48と移動物体(プラットホーム)20との対向部位の一方で、前記2位置のうちの一つの位置に検出センサ50を設け、該検出センサは、各位置において互いに異なった電気信号を発生する。一つの検出センサが2位置でそれぞれ異なった信号を発生するので、一つのセンサで2位置への移動物体の移動を区別して検出することができる。
(もっと読む)
回転角度検出装置

【課題】誤差要因の影響を抑制し、回転角度の検出精度をより安定的に維持することができる回転角度検出装置を提供する。
【解決手段】最終的な絶対回転角度θrは、第1の仮絶対回転角度θabの理想値である。このため、絶対回転角度θrと第1の仮絶対回転角度θabとの差の値である誤差値Δθabは、第1及び第2の従動歯車の回転角度α,βの相対誤差でもある。そこで、誤差値Δθabに基づき算出される補正値εを第1の仮絶対回転角度θabに加味し、これを使用して周期数iを演算するようにした。補正後の第1の仮絶対回転角度θabは前記相対誤差の影響が吸収されたものとなる。すなわち、第1及び第2の従動歯車の回転角度α,βの相対誤差が許容範囲を超える場合であれ、当該相対誤差が存在しない状態に近似した状態で周期数iが演算される。
(もっと読む)
ピストンロッド位置情報をピストンロッド上の磁性層に記録するシステム及び方法
【課題】ピストンロッド上の磁性層内にピストンロッド位置情報を記録するためのシステム及び方法を記載する。
【解決手段】シリンダに対して運動しているピストンロッド上に、記録媒体を構成する磁気的に硬い層が形成されている。磁気パターンが前記磁気的に硬い層内に記録されている。磁界センサが、前記ピストンロッドが前記シリンダに対して運動している間に前記記録された磁気パターンを感知し、前記磁気パターンに応答して、前記ピストンロッドの瞬時位置を求めるために用いられる信号を発生する。
(もっと読む)
シャフトの回転角度をインクリメンタルに求める方法
シャフト、殊に内燃機関のクランクシャフトの回転角度をインクリメンタルに求める方法であって、前記シャフトは、歯(3)と歯の欠損部(4)を具備したセンサホイール(1)と接続されており、当該センサホイール(1)には少なくとも1つのセンサ(6)が割り当てられており、当該センサ(6)は第1の値または第2の値をとる矩形信号を出力信号として生成し、1つの信号エッジは1つの歯のエッジに割り当てられており、前記エッジに対して相対的な対向エッジの時間的な位置は回転方向を符号化し、前記エッジに対して相対的な前記対向エッジの時間的な位置によって、センサホイール(1)の歯(3)に対する回転方向反転点(UKP)の対応付け、またはセンサホイール(1)の歯の欠損部(4)が符号化され、回転角度が各信号エッジ毎に増分(Ink)をカウンターに加えることによって求められ、歯(3)がセンサ(6)を通過している間の回転方向反転後には、一度、回転方向反転後の回転方向の符号を有する半分の増分がインクリメントされ、歯の欠損部がセンサを通過いている間の回転方向反転時には一度、回転方向反転前の回転方向の符号を有する半分の増分がインクリメントされる。 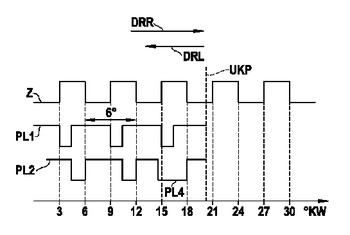 (もっと読む)
(もっと読む)
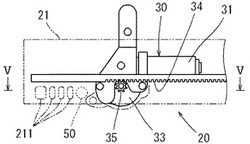
スライド操作装置
【課題】ミキサのフェーダ装置などのスライド操作装置において、操作ノブへの強い力による異常なカウントを防止する。
【解決手段】移動ブロック5を、互いに平行な移動ガイド体3と副移動ガイド体4で摺動自在に保持する。移動ガイド体3を非磁性ステンレスの軸部31と永久磁石材をスケール磁化して磁極(マーキング)を形成したスケール部32とで構成する。移動ブロック5に磁気式センサ7をスケール部32に対して対向配置する。磁気式センサ7でスケール部32の磁極を感知する。操作ノブ6のレバー6aに対して止め金具11A,11Bをストッパ部とする。スケール部32において、ストッパ部間の磁気式センサ7の移動範囲の外側の部分は磁極を形成しない不感帯3A,3Bとする。
(もっと読む)
レール継目検出器および軌道検測車のレール継目位置検出装置
【課題】
小型で天候に左右されずにレールとの継目が高い精度で検出できる軌道検測車のレール継目検出器およびレール継目位置検出装置を提供することにある。
【解決手段】
この発明は、レールの頭部の上部に対応して軌道検測車等の車輌に設けられ隣接して配置され相互に逆方向に巻かれた第1、第2の空芯コイルと、第1、第2の空芯コイルにバイアス電流を流してこれら空芯コイルのインダクタンスの変化に対応する第1、第2の検出信号を得る検出回路とを備えていて、第1の検出信号と第2の検出信号のレベルの差に基づいてレール継目の検出信号を得るものである。
(もっと読む)
半導体装置の製造方法
【課題】 センサ素子におけるセンサの誤認識の発生を低減する。
【解決手段】 封止用樹脂18などの樹脂を印刷する際に、センサIC1のセンサ面1gとこれに対向する封止用マスク16の下面16aとの間に空洞17を形成した状態で、スキージ12によって封止用樹脂18を印刷することにより、印刷時の封止用マスク16とセンサIC1のセンサ面1gとの接触を避けることができ、これにより、印刷時にセンサIC1のセンサ面1gにダメージが与えられることを防止できるため、センサIC1におけるセンサの誤認識の発生を低減できる。
(もっと読む)
シリンダの位置計測装置
【課題】
リセットセンサで検出される信号のピークを正確に求めるようにして、ストローク位置センサの原点位置へのリセットを高精度に行えるようにする。また、シリンダチューブ内部のピストン等の直動部材の移動速度如何にかかわらず、正確に原点位置(特定位置)を計測できるようにする。
【解決手段】
回転センサ100の検出回転量から得られるピストン201の計測ストローク位置Inと、磁力センサ301の検出信号(磁力;電圧値)Vnとの対応関係500を求め、この対応関係500に基づいて、ピストン201が原点位置I0に達したときの計測ストローク位置Ip(ピーク位置)を求め、この計測ストローク位置(ピーク位置)Ipを、原点位置I0にリセットする。
(もっと読む)
ヘッドサスペンションアセンブリ、回転検出機構および搬送機構
【課題】 簡素な構成でありながら、被搬送物の搬送量を正確に検出することの可能な搬送機構を提供する。
【解決手段】 ヘッドサスペンションアセンブリ40は、一対の取付部411と、これらを互いに繋ぐようにU字状に延在すると共にZ軸方向へ弾性を示す腕部412とを有するサスペンション41と、腕部412に設けられた磁気センサ42とを備える。腕部412は、記録面31に対して磁気センサ42を押しつける外力の大きさに応じてZ軸方向に沿ってたわむこととなり、搬送動作時においてZ軸方向に記録面31が僅かに変動する場合であっても、腕部412のたわみの可能な範囲内であれば磁気センサ42と記録面31との接触状態を維持することができる。このため、記録面31の磁気情報を正確に読み取り、搬送ローラ20の回転量を高精度に検出することができる。よって、シートSの搬送量Qを正確に求めることができる。
(もっと読む)
車両検知装置
【課題】 背景磁場の変動に影響されず、かつ遠方の車両を誤検知することが防止できる車両検知装置を提供する。
【解決手段】 道路下に道路の長手方向に間隔をおいて配置した複数の磁気センサ1と、これら磁気センサの出力が示す道路長手方向の磁気分布の波形的特徴から所望の車線について車両が通過したことを検知する演算装置2とを備えた。
(もっと読む)
ヒンジ機構の回転検出装置
【課題】 ヒンジ機構が着磁されることによって起こる誤検出を防ぎ、磁気センサの配置自由度が高く、機器の小型化と筐体内における回転検出機構の省スペース化を図ること。
【解決手段】 電子機器は、首振り回転機構を有するヒンジ機構2を用いたものであって、ディスプレイ面などの表示部を備えた第1の筐体1と、操作部を備えた第2の筐体6とからなり、この第1の筐体1と第2の筐体6とは、非磁性材料からなり、第1の筐体側のヒンジ部2aと第2の筐体側のヒンジ部2bとから構成されているヒンジ機構2によって、首振り回転が可能なように結合されている。第1の筐体側のヒンジ部2aには、磁石5が設けられており、第2の筐体側のヒンジ部2bには、第1の筐体側のヒンジ部2aが180°回転したときに、磁石5と対応する位置に第1の磁気センサ3及び第2の磁気センサ4がそれぞれ配置されている。
(もっと読む)
1 - 11 / 11
[ Back to top ]