
Fターム[2F063DA04]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 測定方法 (3,108) | 測定内容を機械変位に変換して測定 (51)
Fターム[2F063DA04]に分類される特許
1 - 20 / 51
回転角検出装置、及びトルクセンサ
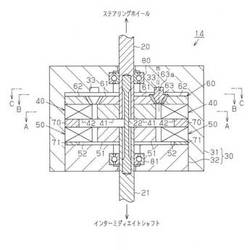
【課題】回転体の多回転の絶対回転角を検出することが可能でありながらも、構造の簡素化を図ることのできるトルクセンサを提供する。
【解決手段】このトルクセンサ14では、第1のレゾルバ40を通じて検出されるインプットシャフト20の回転角度と、第2のレゾルバ50を通じて検出されるロアシャフト21の回転角度との差分値に基づいてステアリングホイールに付与された操舵トルクを演算する。ここでは、インプットシャフト20と一体となって回転する太陽歯車61、磁性体により形成されて太陽歯車61の周囲を公転する遊星歯車63、及び遊星歯車63が噛合される内歯車62により構成される遊星歯車機構60を設ける。そして、第1のレゾルバ40から出力される電圧信号に基づいてインプットシャフト20の回転角及び遊星歯車63の位置を検出し、それらに基づいてステアリングホイールの操舵角を求める。
(もっと読む)
旋回角度計測装置

【課題】加工の煩雑化及び強度上の問題を招来することなく、旋回体の旋回角度を計測すること。
【解決手段】建設機械の下部走行体100に対して上部旋回体200が旋回した場合にロータ10とシャフト20とが相対回転するようにスイベルジョイント1を配設し、ロータ10及びシャフト20を介して回転センサにより、下部走行体100に対する上部旋回体200の旋回角度を検出するようにした旋回角度計測装置において、シャフト20にロータ10の回転中心を軸心とした円周に沿う被検出面41を設け、回転センサにはロータ10及びシャフト20が相対回転した場合の被検出面41の変位を検出する回転検出部80を設けた。
(もっと読む)
車両のアクセル開度検出装置
【課題】部品点数が少なく構造が簡単で,しかも高度の製作精度を必要としないインダクタンス検出式の車両のアクセル開度検出装置を提供する。
【解決手段】センサケース5に互いに離間して支持される第1及び第2支軸20,21と,第1支軸20に巻回される検出コイル部22a及びこの検出コイル部22aから引出されて第2支軸21に支持されるコイル引出し部22bを有するコイル22と,ロータ6に支持されてコイル引出し部22bに係合して,アクセルグリップGの開閉操作に伴なうロータ6の回転角度変化に応じコイル引出し部22bの長さを変化させて検出コイル部22aの巻き数を変化させるコイル引出し制御部材24と,検出コイル部22aのインダクタンスを検出してロータ6の回転角度に対応する信号を出力するインダクタンス検出回路28とでアクセル開度センサ23を構成した。
(もっと読む)
角度センサの検出信号補正方法
【課題】ホール素子に発生するオフセット電圧値を周囲温度に従って除去し、微小角度の測定精度を向上させる。
【解決手段】ホール素子から成る角度検出用センサ15は磁束密度検出面であるチップ面Tが、磁束方向と平行になる場合をθ=0となるように配置されている。センサ15の出力Vには、定電流Iを供給することで、角度変位θと無関係で内部抵抗に起因するオフセット電圧値O1が発生し、出力Vに重畳している。
オフセット電圧値O1を得るためには、オフラインにおいてセンサ15に無磁界状態で定電流Iを供給しながら温度Δtを変化させて、出力Vのデータを求める。データから温度Δtに対するオフセット電圧値O1のテーブルを作成する。
角度測定中では、周囲温度を測定し、オフセット電圧値O1を記憶したテーブルから求め出力Vから差し引けば、オフセット電圧値O1が除去される。
(もっと読む)
回転角度検出装置
【課題】自動車のステアリングの回転角度検出等に用いられる回転角度検出装置に関し、部品点数が少なく安価なものを提供することを目的とする。
【解決手段】カバー20に外方開口の略箱状で、側壁部20Bに端子21が内外方に貫通したコネクタ部20Aを一体に形成すると共に、内方の端子21の接続部21Aに配線基板17を接続することによって、カバー20にコネクタ部20Aが一体に形成されているため、部品点数が少なく安価な回転角度検出装置にすることができる。
(もっと読む)
回転角度検出装置および電動パワーステアリング装置
【課題】温度変化があった場合でも、ギヤのバックラッシュの変化量を低減できる回転角度の検出精度のよい回転角度検出装置および電動パワーステアリング装置を提供する。
【解決手段】ケース8は、センサハウジング9との取付け部分、及び検出ギヤ4の回転を支持する部分に線膨張係数の小さい金属により形成されたインサート部材11がインサート成形されている。また、回転体10及びメインギヤ2内に装着されメインギヤ2を保持する保持リング3が同じく線膨張係数が小さい金属材料で形成されている。この保持リング3を介してメインギヤ2は回転体10に圧入され、回転体10にメインギヤ2がガタのない状態で組付けられる。
(もっと読む)
回転角度検出装置
【課題】誤差要因の影響を抑制し、回転角度の検出精度をより安定的に維持することができる回転角度検出装置を提供する。
【解決手段】最終的な絶対回転角度θrは、第1の仮絶対回転角度θabの理想値である。このため、絶対回転角度θrと第1の仮絶対回転角度θabとの差の値である誤差値Δθabは、第1及び第2の従動歯車の回転角度α,βの相対誤差でもある。そこで、誤差値Δθabに基づき算出される補正値εを第1の仮絶対回転角度θabに加味し、これを使用して周期数iを演算するようにした。補正後の第1の仮絶対回転角度θabは前記相対誤差の影響が吸収されたものとなる。すなわち、第1及び第2の従動歯車の回転角度α,βの相対誤差が許容範囲を超える場合であれ、当該相対誤差が存在しない状態に近似した状態で周期数iが演算される。
(もっと読む)
磁気検出素子及びこれを用いた回転角度検出装置
【課題】自動車のステアリングの回転角度検出等に用いられる磁気検出素子及びこれを用いた回転角度検出装置に関し、温度変化等による誤差がなく、高精度で確実な回転角度の検出が可能なものを提供することを目的とする。
【解決手段】略矩形状に配列された四つの磁気抵抗22A〜22Dの、対向する二つずつの磁気抵抗22Aと22B、磁気抵抗22Cと22Dを接続すると共に、この磁気抵抗22Cと22Dの両端に切換手段24Aと24Bを設けて磁気検出素子21を形成すると共に、これを磁石34や35に対向して配置し、制御手段37が磁気検出素子21の切換手段24Aと24Bを切換え、差動増幅手段27Aを介した磁気抵抗22からの複数の磁気信号を減算して、回転体31の回転角度を検出することによって、温度変化等による誤差がなく、高精度で確実な回転角度の検出が可能なものを得ることができる。
(もっと読む)
チェンジレバーユニット
【課題】位置検出精度のばらつきをより一層抑制して検出結果の安定化を図るとともに、シフトパターンの変更に伴う設計変更をできるだけ抑制する。
【解決手段】ホール素子14b、シフト回動軸4、セレクト回転軸5、チェンジレバー6、およびマグネット14aが1つのユニット本体2に取り付けられて、1つのサブユニットとして構成されている。これにより、チェンジレバー6,マグネット14a、およびホール素子14bがより高精度に位置決めされて設けられている。
(もっと読む)
回転角度検出装置
【課題】主に自動車のステアリングの回転角度検出等に用いられる回転角度検出装置に関し、組立てが容易に行え、回転角度の確実な検出が可能なものを提供することを目的とする。
【解決手段】回転歯車10に噛合する第一の検出歯車12の回転中心を、回転歯車10の回転中心から取付面部11Aと直交方向へ延出する中心線CLから偏心させて設けることによって、第一の検出歯車12を回転歯車10に噛合させる際、一方の歯車の歯先と他方の歯先が対向した状態でも、第一の検出歯車12が回転して、各々の歯先と歯底が合った状態で組立てが行えるため、手間がかからず、容易に組立てが可能な回転角度検出装置を得ることができる。
(もっと読む)
回転角センサ取り付け構造及び同構造を用いた内燃機関の可変動弁装置
【課題】回転角センサ取り付け構造を小型化できるようにする。
【解決手段】ボールねじ61の回転をリダクションギヤ94を介して検出する回転角センサ取り付け構造において、リダクションギヤ94の中央部にベアリング98のアウタレース98Aを圧入固定し、ベアリング98のインナレース98Bを支持ボルト96によって支持壁210に固定すると共に、リダクションギヤ94の外側面94Bに支持ボルト96の頭部96Bを跨ぐセンサ80のセンサ連結具95を一体に固定した。
(もっと読む)
ドア開閉装置
【課題】回転センサの検出精度を向上し、また装置全体を小型軽量化する。
【解決手段】クラッチ32を周囲に配置した回転軸32Aの端部側に回転センサ35を設ける。また、回転センサ35は、磁気抵抗素子35Cc(異方性磁気抵抗素子)を電磁クラッチが生じる磁束に対して交差する永久磁石35Bdの磁束を検出する位置に固定してある。このため、異方性磁気抵抗素子は、クラッチ32が励磁されたときの磁界の影響を受けない。この結果、回転センサ35の検出精度を向上できる。さらに、モータベース36の外部に回転軸32Aの一端部を延出して回転センサ35を設けることで、金属製のモータベース36を小型軽量化できる。
(もっと読む)
回転測定装置、シート搬送装置、原稿読取装置、及び画像形成装置
【課題】回転体の軸線直交方向への変位量を測定するための専用のセンサーを設けることなく、回転体の回転量と軸線直交方向への変位量とを測定する。
【解決手段】回転体の回転軸部材と同期して自らも回転する被検部材と、これの特性を検知するセンサーとの組合せとして、被検部材が1回転する毎に、センサーが1周期分の正弦波を出力し、且つ被検部材が回転体とともに軸線直交方向に移動するのに伴って、センサーが正弦波の振幅を変化させるもの、を用いた。かかる組合せの一例としては、図1に示す被検部材510と距離センサー(511、512)との組合せを挙げることができる。このような組合せのセンサーから出力される正弦波に基づいて回転体の回転量を算出しつつ、正弦波の振幅の変化量に基づいて回転体の軸線直交方向の変位量を算出するようにした。
(もっと読む)
位置検出装置
【課題】少ない数の磁気センサと単純構造のマグネットを用いてレバーの操作位置を検出できる位置検出装置を提供する。
【解決手段】シフトレバー1の操作に伴って回路基板9と平行な同一平面内を移動するホルダ7に円板状のマグネット8を固着し、回路基板9に一対の磁気センサ10(10A,10B)を実装する。マグネット8は一方の主面をN極、他方の主面をS極に着磁してあり、磁気センサ10は、非磁性材料からなる基台20の表面層に設けられた軟磁性体層22と、この軟磁性体層22の外縁部近傍に配置された少なくとも2つのホールIC21とを有し、これらのホールIC21が軟磁性体22の中心を原点とするX−Y直交座標上に配置された構成となっている。これにより、磁気センサ10のペアで検出されたホール電圧に基づいてマグネット8の磁束のX軸に対する方向(角度)を検出でき、その検出結果に基づいてシフトレバー1の複数のシフト位置を検出することができる。
(もっと読む)
多回転角度検出装置
【課題】コンパクトでありながら大きな減速比を得られる多回転角度検出装置の提供。
【解決手段】多回転可能な第1回転体1の外周面に第1歯部1bを設け、この第1歯部1bに遊星歯車機構4の外輪歯車7の外歯部7aを噛合する。遊星歯車機構7は太陽歯車8と遊星歯車9および太陽歯車8に同軸配置された第2回転体2とを備えており、第2回転体2に第1磁石10を取着すると共に、第1磁石10に対向する第1磁気検出素子12を回路基板5に実装する。遊星歯車9は互いの歯数を異にする第1ギア部9aと第2ギア部9bを有しており、歯数の小さい方の第2ギア部9bを第2回転体2の第2歯部2aに噛合することにより、第1回転体1の回転に伴って第2回転体2が所定の減速比で低速回転する。
(もっと読む)
多回転角度検出装置
【課題】小型かつ安価にしてフェールセーフ性に優れた多回転角度検出装置を提供する。
【解決手段】歯数が異なる第1ギア11及び第2ギア12を回転軸Y−Yの周囲に同心に形成してなるロータ1と、第2ギア12と噛み合わされ、その回転軸X−Xがロータ1の回転軸Y−Yと交差する方向又は食い違う方向に配置された第2従動ギア14と、第1ギア11と噛み合わされ、その回転軸が第2従動ギア14の回転軸と同心に配置された中継ギア17と、中継ギア17と噛み合わされ、その回転軸が第2従動ギア14の回転軸と平行に配置された第1従動ギア13と、第1及び第2の従動ギア13,14にそれぞれ取り付けられた第1及び第2の磁石18,19と、第1及び第2の磁石18,19とそれぞれ対向に配置された第1及び第2の磁気検出素子20,21とを備える。
(もっと読む)
多回転角度検出装置
【課題】小型の多回転角度検出装置を提供する。
【解決手段】鍔状のギア形成部1aに歯数が異なる第1ギア11及び第2ギア12が同心に形成されたロータの回転軸Y−Yを含む平面に対して、磁石18を備えた第1従動ギア13の回転軸X1−X1と、磁石19を備えた第2従動ギア14の回転軸X2−X2とをそれぞれ直交させて配置する。
(もっと読む)
内側寸法測定器
【課題】小口径シリンダゲージにも適用可能で、構成が単純で且つ高精度な内側寸法測定を可能にする。
【解決手段】被測定物に接触する複数の接触部110と、該複数の接触部110の内側に配置されて自身の内側に空間136を有すると共に、該複数の接触部110間の距離の変化で変形する空間136を内部に有する有底筒状部材120と、該空間136を密閉するように有底筒状部材120の開口部120Aに取付けられると共に、該空間136の変形で生じる自身の撓み量を検出する変位センサ140と、を備える。
(もっと読む)
レール変位計
【課題】鉄道軌道等に近接して施工される種々の土木及び建築等の工事影響に伴う軌道レールの高低狂い、通り狂い、水準狂いを単独のものにて監視計測できるようにしたレール変位計を提供する。
【解決手段】球体状の接続部を介して接続された第一管体と第二管体とを備え、該第一管体と該第二管体が自由方向に枢動変形するに加え該第二管体が管体中心軸に対して回転変形する手段を備え、前記球体に該球体中心に対して対称となるよう2つのロッドを設け、一方のロッドの基端を前記第一管体内に固定し他方のロットの基端を前記第二管体内に保持し、前記枢動変形と前期回転変形を感知する手段と備えることにより軌道監視のうち高低狂い、通り狂い、水準狂いを計測できるよう構成した。
(もっと読む)
空間位置特定装置および特定方法
【課題】簡易な構成で容易に対象物の空間位置を特定することができる空間位置特定装置および空間位置特定方法を提供する。
【解決手段】三次元座標系に配置される磁界発生器2によって、Z軸と平行な向きに磁界Gを発生させて、第一基準点Aに配置される第一磁界検出器3によって、第一基準点Aと磁界Gの発生点CをXY平面に投影した点C1とを通る直線である第一基準線L1がX軸と成す角度である第一角度θ1を検出し、第二基準点Bに配置される第二磁界検出器4によって、第二基準点Bと磁界Gの発生点CをXY平面に投影した点C1とを通る直線である第二基準線L2がX軸と成す角度である第二角度θ2を検出し、原点Oに配置される第三磁界検出器5によって、原点Oと磁界Gの発生点CをYZ平面に投影した点C2とを通る直線である第三基準線L3がY軸と成す角度である第三角度θ3を検出して、磁界発生器2の空間位置を特定する。
(もっと読む)
1 - 20 / 51
[ Back to top ]