
Fターム[2F063DA05]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 測定方法 (3,108) | 測定内容を直接信号に変換して測定 (1,291)
Fターム[2F063DA05]に分類される特許
41 - 60 / 1,291
物理量検出装置
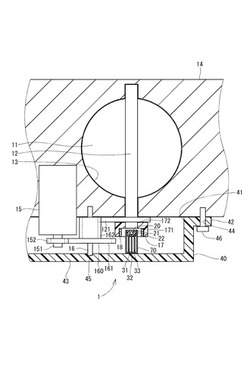
【課題】ICパッケージの回路面に電荷が帯電するのを防止可能な物理量検出装置を提供する。
【解決手段】ICパッケージ20は、弁軸12の回転角の変化に応じた信号を出力する磁気検出素子21、当該磁気検出素子21を覆う封止体22、および、磁気検出素子21に電気的に接続するとともに封止体22から突出するよう設けられる端子31、32、33を有している。カバー部材40は、磁気検出素子21が前記信号を出力可能なようICパッケージ20を収容している。ターミナル部材70は、導電性を有する材料により形成されている。ターミナル部材70は、ICパッケージ20のグランド用の端子32に電気的に接続するとともに封止体22に当接するようカバー部材40に設けられている。ターミナル部材70は、磁気検出素子21に電力を供給する電源の負極側に電気的に接続される。
(もっと読む)
電歪センサ

【課題】素子の変形により電気的変化を生じるセンサであって、時間が経過しても感度が低下しないセンサを提供する。
【解決手段】電歪素子の変形により静電容量変化を生じる電歪センサ(40)において、第1の電歪材料層(1)およびその両面に各々配置された一対の電極(3a、3b)より構成される第1の電歪素子(10)と、第2の電歪材料層(11)およびその両面に各々配置された一対の電極(13a、13b)より構成される第2の電歪素子(20)と、これら電歪素子間に挟持された基材(25)とを含む受感部(30)を設ける。受感部(30)は、外力の作用を受けることにより変形である。第1および第2の電歪材料層(1、11)の静電容量をそれぞれ測定可能なように、各電極に引出し線(5a、5b、15a、15b)が接続される。第1および第2の電歪材料層(1、11)は、10μm以下の厚みおよび20以上の比誘電率を各々有するものとする。
(もっと読む)
位置センサ、計測システム及び平面ステージ
【課題】本発明は、静電容量を利用して簡易な構成で計測対象の変位を計測する。
【解決手段】本発明は、固定部に対して平面内を相対的に移動する移動ステージを有する平面ステージを提供する。本平面ステージは、移動ステージの位置を計測する位置センサであって、所定の間隔で相互に対向している第1の固定対向電極対と第2の固定対向電極対とを有する固定電極部と、第1の固定対向電極対の間に部分的に挿入されている第1の可動電極と、第2の固定対向電極対の間に部分的に挿入されている第2の可動電極50とを有する可動電極部とを有する第1のセンサを備える。第1の固定対向電極対は第1の可動電極50の挿入状態に応じて変化する第1の静電容量を有し、第2の固定対向電極対は第2の可動電極50の挿入状態に応じて変化する第2の静電容量を有する。
(もっと読む)
回転角およびトルクのセンサ
【解決手段】 回転角およびトルクのセンサは、シャフト部分(1、2)と共に回転しないように接続されている2つの歯車(4、5)を備え、これら2つの歯車は、歯車(6、7)と噛合する。一方の歯車(7)には、単極磁石または多極磁石(12、13)が取着されている。他方の歯車(6)には、極の数に合った複数の磁束誘導部(17、18)が取着されており、L字形状を持つ。磁束誘導部(17、18)の一方の足部は、多極磁石(12、13)の方向を向き、他方の足部は、歯車(6)に平行に延伸し、一方の足部は歯車(6)の一方の側にあり、他方の足部は歯車(6)の他方の側にあり、これらの足部の間には、歯車(6)内に配されている第2のセンサ(16)が配されている。 (もっと読む)
位置センサ、計測システム及び平面ステージ
【課題】本発明は、静電容量を利用して簡易な構成で計測対象の変位を計測する。
【解決手段】本発明は、移動ステージの位置を計測する位置センサ100を提供する。位置センサ100は、第1の固定対向電極対111,121の間に部分的に挿入されている第1の可動電極131と、第2の固定対向電極対112,122の間に部分的に挿入されている第2の可動電極132と、第3の固定対向電極対113,123に部分的に挿入されている第3の可動電極133とを備える。第1の対向電極は、第2の対向電極に対して第1の方向にシフトした位置に配置され、第3の対向電極は、第1の対向電極に対して第2の方向にシフトした位置に配置されている。
(もっと読む)
アブソリュート変位量を算出する装置及びその方法
【課題】本発明は、移動体のアブソリュート変位量を検出することを課題とする。
【解決手段】変位量を検出する実施例では、主軸の多回転アブソリュート回転角を主軸及び副軸に結合された角度センサによって検出された回転角度から算出する。回転駆動源11に結合された主軸12の回転は予め定める変速比で副軸13,14に伝達される。主軸12及び副軸13,14の回転角度Ss,Sp,Sqは、角度センサ15a,15b,15cによって検出され、それらはAD変換角度計算部16で角度検出値θs,θp,θqとしてそれぞれ同期化/整数化処理部17に送られ、整数化された周期信号p,qが算出される。周期信号p,qは、周期演算部18にそれぞれ送られ、主軸の周期信号rが算出される。主軸の多回転アブソリュート回転角θcは、回転角合成部19で主軸の周期信号r及び主軸の角度検出値θsに基づいて、算出される。本発明は、直線移動する移動体の変位量を検出する装置にも適用することができる。
(もっと読む)
静電容量式検出装置
【課題】センサ面内の全域に亘って検出感度の差を低減でき、しかもマルチポイントの検出を精度よく実現できる静電容量式検出装置を実現すること。
【解決手段】本発明の静電容量式検出装置(1)は、隣接電極間で静電容量が形成されるように、センサ基板(11)に配設された複数の検出電極(12)を具備し、センサ基板(11)の相対的に検出感度が低い角部検出領域(A2)に形成される静電容量を、相対的に検出感度が高い中央検出領域(A1)に形成される静電容量に対して相対的に大きくしたことを特徴とする。
(もっと読む)
導電性膜センサ及び導電性膜の検出方法
【課題】導電性膜の位置及び特性を特定可能な、導電性膜センサを提供する。
【解決手段】周波数が異なる第1及び第2の磁界を放射する磁界放射器1と、導電性膜に第1の磁界を照射した場合の、磁界放射器1の特性、導電性膜の位置及び特性の第1の関係と、第2の磁界を照射した場合の、磁界放射器1の特性、導電性膜の位置及び特性の第2の関係と、を保存する記憶装置401と、測定対象導電性膜2に第1の磁界を照射した場合の磁界放射器1の特性及び第1の関係に基づき、導電性膜の位置及び特性の第3の関係を算出し、測定対象導電性膜2に第2の磁界を照射した場合の磁界放射器1の特性及び第2の関係に基づき、導電性膜の位置及び特性の第4の関係を算出する算出部301と、第3及び第4の関係に共通する、導電性膜の位置及び特性の組み合わせを特定する特定部303と、を備える導電性膜センサ。
(もっと読む)
磁気抵抗素子を用いた位置検出装置及びこれを用いたレンズユニット
【課題】組立・調整作業が容易で良好な出力特性が得られる小型の位置検出装置およびこれを用いたレンズユニットを提供する。
【解決手段】磁気抵抗素子3を保持するホルダ5は、一端に磁気抵抗素子3の感受面と略平行且つ移動方向と直交する方向に突出した凸部を有し、ベース7は、前記凸部が挿入される凹部と、光軸と平行な方向に配設され、互いに平行な2つの平面部25を有する2つの突出部21と、ベース7を鏡筒に取り付ける位置決め手段とを備え、シムは、突出部21に設けられた平面部25と前記鏡筒との間に挿入され、ベース7を前記位置決め手段によって前記鏡筒に取り付ける際に、ベース7が突出部21を基点として湾曲することにより、磁気記録媒体と磁気抵抗素子3の間隔を調整し、前記シムは、その厚みを変更することで前記ベース7の前記鏡筒に対する距離が調整され、磁気抵抗素子3の前記磁気記録媒体に対する倒れが補正される。
(もっと読む)
演算装置、相対移動量測定装置、および、演算方法
【課題】位相の異なる1対の入力信号から出力を得る演算においては、arctan等の複雑な演算が必要となり、演算回路の負荷が大きくなってしまう。また、演算回路の負荷を軽減するためにルックアップテーブルを参照して出力を得る場合、必要なメモリが大きくなってしまう。
【解決手段】位相の異なる1対の入力信号IN1、入力信号IN2に対して、関数Fを用いて、入力値XをX=F(IN1、IN2)と定義する。入力値Xと出力値Yの関係を慨ね線形となるように関数Fを定義することにより、複雑な演算を使用することなく入力信号から予想される出力値を得ることが可能となる。ルックアップテーブルを参照する場合は、出力値と予想される出力値との差分のみをテーブル化しておくことにより、メモリを削減可能となる。
(もっと読む)
回転角計測装置,制御装置およびそれらを用いた回転機システム
【課題】磁束発生体が高速に回転する場合であっても、磁束発生体または磁気センサの近傍に非磁性の導体(導電体)を配置した構成を用いて精度良く磁界角または回転角を計測すること。
【解決手段】磁界方向に感応する磁気センサ70と、前記磁気センサからの出力が入力される検出部302と、を備えた回転角計測装置であって、前記回転角計測装置は、磁束発生体202を備えた回転体121とともに用いられるものであり、前記磁気センサの出力は、前記磁界方向に対応した原角度信号セット155であり、前記検出部は、前記回転体の回転速度を引数とする補正関数が出力する補正値を用いて前記磁気センサの近傍に配置された非磁性の導体の影響を補正した補正角度を出力する。
(もっと読む)
間隙測定装置、表面形状測定装置、間隙測定方法および表面形状測定方法
【課題】探針と試料とが衝突するのを防ぐことができ、比較的高速での走査が可能で、分解能が高く、正確な表面形状を得ることができる間隙測定装置、表面形状測定装置、間隙測定方法および表面形状測定方法を提供する。
【解決手段】探針12が、試料1の表面にほぼ垂直な方向に沿って振動するよう、試料1の表面との間に隙間をあけて配置されている。電圧印加手段14が、試料1と探針12との間に直流バイアス電圧を印加可能である。制御手段15が、走査手段11により探針12を走査しつつ、振動する探針12が検出した電圧印加手段14による電界信号に基づいて、試料1の表面と探針12との距離を求めるとともに、探針12が検出する電界信号の平均値が一定になるよう、走査手段11により探針12を垂直方向に移動させる。制御手段15は、求められた試料1の表面と探針12との距離と、探針12の軌跡とから試料1の表面形状を求める。
(もっと読む)
回転角検出装置、および、これを用いた電動パワーステアリング装置
【課題】高精度に被検出部の回転角度を検出可能な回転角検出装置、および、これを用いた電動パワーステアリング装置を提供する。
【解決手段】回転角検出装置10のブリッジ回路部11、12は、被検出部の回転角度に応じてインピーダンスが変化するセンサ素子21〜28により構成される複数のハーフブリッジ14〜17を有する。制御部51は、複数のハーフブリッジから出力される出力信号を取得し、位相ずれαを補正するための位相補正値φを出力信号の組合せ毎に算出し、メモリ部52に記憶する。制御部51は、出力信号の一部に異常が生じた場合でも、異常が生じていない出力信号の組合せに対応した位相補正値φに基づき、補正前回転角度θを補正する。これにより、位相補正値φに基づいて補正前回転角度θを補正するので、センサ素子の実装ずれ等があっても、高精度に被検出部の回転角度δを算出することができる。
(もっと読む)
モータ及び電動パワーステアリング用モータ
【課題】ロータの回転位置の検出精度を向上して、トルクリップルの低減、出力向上に寄与できるモータを提供する。
【解決手段】モータMの回転軸22にはホルダ31を用いてセンサマグネット32が保持されるのに対し、そのセンサマグネット32と軸方向に対向配置された磁気センサ44が回路基板43上に設けられている。そして、センサマグネット32の各磁極部の外周面には磁気誘導部51,52が当接して設けられ、各磁気誘導部51,52は、磁気センサ44と径方向に対向する位置まで延び、センサマグネット32により生じる磁束を磁気センサ44上に誘導する。
(もっと読む)
表面形状測定用触針式段差計及び該段差計における測定精度の改善方法
【課題】表面形状への追随性が良く、かつ、変位雑音が小さい表面形状測定用触針式段差計及び該段差計における測定精度の改善方法を提供する。
【解決手段】変位センサ20の磁性体コアに固有雑音の小さい強磁性体のコアを使用し、低雑音の差動トランスとして形成し、低雑音の差動トランスの出力を、低雑音のデジタルロックインアンプで計測し、変位の測定結果からセンサ20の固有振動に起因する雑音を、低域通過フィルターを用いて移動平均法で除去し、低域通過フィルターの遮断周波数を通常の15Hz程度よりも高くする。
(もっと読む)
回転角検出装置およびそれを用いたアクチュエータ
【課題】 部品点数が少ない回転角検出装置を提供する。
【解決手段】 ECU71は、ホールIC751により検出されたパルス信号PS1と、パルス信号PS1のエッジ間のオン時間T1、オフ時間T2およびオン時間T3から生成した仮想パルス信号PS2とに基づいて各パルス信号PS1およびPS2のエッジE1〜E7をカウントすることにより、ロータ20の回転角を3.75度ごとに検出する。この構成では、1つのホールIC751に対し、ロータ20の回転に同期した2つのパルス信号PS1および仮想パルス信号PS2を用いて回転角を検出することができる。そのため、従来2つあったホールICの数を1つに減らしたとき従来と同等以上の分解能を得ることができる。つまり、分解能を維持しつつホールICの数を減らすことが可能である。
(もっと読む)
パワーステアリング装置
【課題】コストの高騰を抑制しつつも転舵輪の舵角を検出することのできるパワーステアリング装置を提供する。
【解決手段】ステアリングホイール側ピニオン軸2に設けられた出力側レゾルバ7の軸倍角をk1とし、モータ側ピニオン軸に設けられたモータ側レゾルバ13の軸倍角をk2とし、モータ側ピニオン軸を一回転させたときにラック軸3を介して上記ステアリングホイール側ピニオン軸2が回転する回転角度をθa°とした場合に、(θa/k2)>(360/k1)であって、且つ(θa/k2)/(360/k1)が整数でない値となるように設定する。これにより、出力側レゾルバ出力信号S2の値とモータ側レゾルバ出力信号S3の値との組み合わせが、異なる舵角で同一の値をとることがなくなり、両レゾルバ出力信号S2,S3から舵角を導出することが可能となる。
(もっと読む)
電動機
【課題】回転角度検出センサを筐体の内部に備える電動機において、回転角度検出センサからの出力を取り出すためのケーブルを筐体の外部に引き出す作業を簡易化することと、回転角度検出センサの固定及び回転角度検出センサを配置した空間の密封に用いる部材に求められる精度を抑えることとの少なくとも1つを実現すること。
【解決手段】電動機1は、筐体6の内部に、シャフト8の回転角度を検出するレゾルバ50を備えている。レゾルバ50は、シャフト8の一方の端部側に取り付けられている。レゾルバ50は、レゾルバ押さえ40によって第2フランジ63に押し付けられて、固定される。レゾルバ押さえ40は、内部に冷却媒体導入通路41を有しており、第2冷却媒体分配通路655からの冷却媒体をシャフト8の軸方向通路811へ供給する。
(もっと読む)
モータの回転角度検出装置
【課題】レゾルバを使用してモータの回転角度を検出する回転角度検出装置において、電源電圧が多少低くても、モータの回転角度の検出精度を確保する。
【解決手段】回転角度検出装置は、励磁信号を発生させる励磁信号発生器400と、発生された励磁信号を増幅するオペアンプ410と、増幅された励磁信号の直流成分を除去するコンデンサ420と、直流成分が除去された励磁信号を入力し、モータの回転角度に応じたレゾルバ信号を出力するレゾルバ280と、を有する。また、レゾルバ280とコンデンサ420とによりLC回路を構成し、レゾルバ280に入力される励磁信号の周波数が共振周波数となるように、コンデンサ420の静電容量を設定する。そして、LC回路における直列共振で励磁信号の振幅を大きくし、レゾルバ280から出力されるレゾルバ信号のSN比の向上を通して、モータの回転角度の検出精度を確保する。
(もっと読む)
位置検出装置、駆動機構、および内視鏡装置
【課題】位置検出の精度の高い位置検出装置、駆動機構、及び内視鏡装置を提供すること。
【解決手段】駆動部材15に対して直線移動する被駆動部材17の位置を検出する位置検出装置30であって、駆動部材15に対して位置決めして設けられた固定子31と、被駆動部材17に設けられた移動子34と、被駆動部材17と移動子34とを連結し、被駆動部材17の直線移動方向における被駆動部材17に対する移動子34の進退移動を規制する弾性体20と、を備え、弾性体20は、移動子34が固定されているとともに移動子34を固定子31へ向けて付勢する軸部23を有し、軸部23は、移動子34を固定子31に接触させ、且つ、駆動部材15に対して被駆動部材17が直線移動されたときに、固定子31に対する移動子34の位置を、固定子31の外面形状に沿って追従させる。
(もっと読む)
41 - 60 / 1,291
[ Back to top ]