
Fターム[2F063DA05]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 測定方法 (3,108) | 測定内容を直接信号に変換して測定 (1,291)
Fターム[2F063DA05]に分類される特許
1,281 - 1,291 / 1,291
タッチセンサおよびダイナミックタッチセンサシステム
本発明は、等電位空間と、等電位空間がマッピングされる直交座標空間との間の改良された位相同型を伴う、タッチセンサ(105)についてのものである。タッチセンサ(105)は、タッチ領域(130)を有する基板(125)、およびタッチ領域(130)と電気的に結合された1組の電極(135)を含んでいる。タッチセンサは、さらにタッチ領域(130)を縁どる複数の抵抗バンド部分(140)を含んでいる。電極(135)は、抵抗バンド部分(140)の間に位置している。各抵抗バンド部分は、電極の抵抗率とタッチ領域の抵抗率との間の中間の抵抗率を有しており、その結果、低抵抗電極と高抵抗タッチ領域との間の変遷を提供し、タッチ領域のコーナー内部の位相同型を改良する。少なくとも1つのバンド部分は、位相同型へのさらなる改良を提供する不均一線形抵抗を有している。 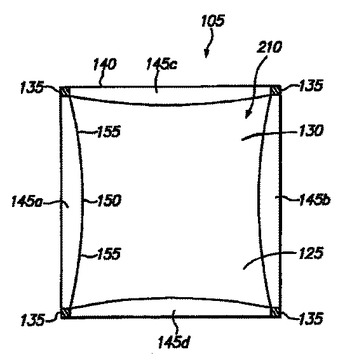 (もっと読む)
(もっと読む)
容量性位置センサー及び感知方法
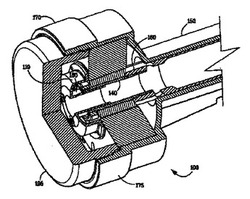
【課題】多様なシステムとアプリケーション内の往復運動部材の瞬間位置を監視するセンサー及び感知方法を提供する。
【解決手段】往復運動部材の位置を判定するセンサーであって:上記センサーは固定電極とガード電極を含み、上記固定電極は上記ガード電極と電気絶縁された固定電極支持構造体、及び上記往復運動部材の移動に正比例して移動するように位置された可動電極を含み;上記固定電極と上記可動電極は容量性構造体を形成し、上記容量性構造体は可変容量を有し、上記可変容量は上記往復運動部材の瞬間位置に正比例することを特徴とする。
(もっと読む)
中央潤滑システムに関連する装置
本発明は中央潤滑システムに関連した装置に関し、該装置は潤滑剤用容器と、ポンプユニットと、制御装置と、配管システムと、圧力モニタ装置と、配管システム/潤滑すべき対象物に存在する潤滑剤の圧力の作用によって動く少なくとも1個のピストン(5)を備えた少なくとも1個のフィーダと、該フィーダの作動をモニタする動作モニタ装置とを含む。本発明は、前記動作モニタ装置が磁化可能性の小さい材料から作られたニップル(4)に装着されたセンサ部分(3)を含むことを特徴とする。そのニップル(4)では、磁界を発生させるための永久磁石(2)と、前記ピストン(5)の動きを検出するセンサ(4)と、該センサ(4)から受信され、前記センサ部分(3)に対する前記ピストン(5)の動きによって発生した磁界の変化の結果発生した信号を処理し、この処理された信号を制御装置まで伝送する電子装置部分(13)とを含む。 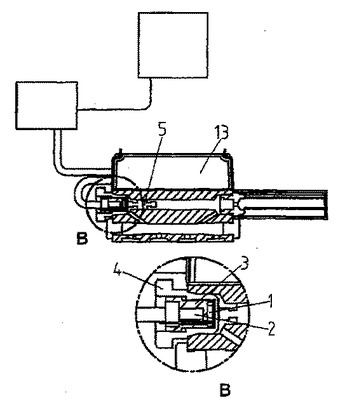 (もっと読む)
(もっと読む)
増分測定および車輪の差速の測定によるステアリングホイールの絶対角位置の決定
自動車のシャーシに対してその自動車のステアリングホイール(1)の絶対角位置θを決定するためのシステムは、ステアリングホイールの相対角位置δをインクリメンタルに測定するための装置と、同一軸に取り付けられた車輪の差速ΔV/Vを測定するための装置(2)と、期間tにおいて角位置と差速をサンプリングするための処理装置(8)を備える。前記装置は、tn瞬間毎に、差速ΔV/Vに従う絶対角位置θ(tn)の推定値θ*(tn)と、角位置θ*(tn)とδ(ti)の間の平均差変位(tn)を決定するのに適した演算手段を備える。ここでiは0からnまでの範囲の変数であり、絶対角位置θ(tn)は平均差変位(tn)と角位置δ(tn)の和である。 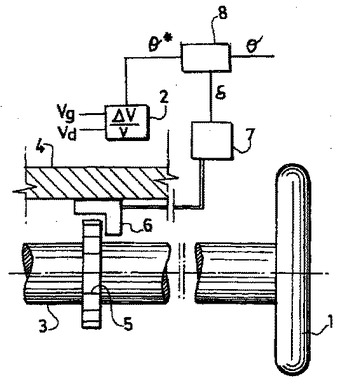 (もっと読む)
(もっと読む)
物体の形状を決定する方法及びそのような方法のためのシステム
処理手段(12)及び静電感知装置(20)を使用するシステムが記載されている。該システムは、所定形状の物体(42,70)及び感知された静電的測定値(40)に対する静電的計算(44,46)の反復(56)から未知の物体の形状が計算されるような方法を実行する。上記所定の物体形状(70)は未知の物体形状(72)に向かって該物体形状が決定される(60,74)まで当該方法の各反復において変形される。該形状の変形は、上記所定形状に供給された電荷分布に依存するような静電電位の零等高線を計算することに基づくものである。  (もっと読む)
(もっと読む)
タイヤの異常検出方法および車輪転動の異常検出方法

【課題】汚れ等に影響されずに、タイヤに生じた異常を直接検出し、これを運転者に知らせるためのタイヤの異常検出方法を提供する。
【解決手段】磁性体3を、タイヤの環状部分2に周方向に沿って所定のピッチで配設するとともに、環状部分と交差する環状磁路を形成する磁石12を車体側に設け、タイヤの回転に伴い生起する環状磁路の磁束密度変化によって誘起される起電力を測定し、この測定波形から前記タイヤ環状部分の異常を検出する。
(もっと読む)
歪みゲージ式伸び計
【課題】小さい外形の伸びセンサで試験体の大きな伸びを測定し、しかも直線性のよいデータを得る。
【解決手段】上アーム1と下アーム2の一端は回転支持部3で互いに回転可能に連結され、上アーム1に一端が固定された板バネ6が下アーム2の方向に延び、下アーム2にはカム9が取り付けられており、押圧面10が板バネ6の接触点7に接触するように配置されている。板バネ6の中央付近には歪みゲージ8が貼付されて伸びセンサとしての受感部を形成している。試験体Sが伸ばされると板バネ6はカム9によって押圧され変形させられるので、カム9の押圧面10の形状を適当に設計された曲面としておくことによって、上下アームの開き量に対して板バネ6の変形量を少なくできるので大きな伸びが測定でき、また、直線性のよい関係とすることができる。
(もっと読む)
手持式工具装置用の深さゲージ
【課題】 固定素子をセットすべく手持式工具装置により形成される有底孔の深さを、固定素子に関連するデータに基づいて規制することのできる深さゲージを提案することである。
【解決手段】 手持式工具装置(2)により形成される有底孔の深さを規制するための深さゲージ(1)は、その有効長(L)を調整し得るよう、工具装置(2)の工具軸線(A)と平行に所定範囲内で可動とされた、座屈荷重に対する十分な曲げ剛性を有するロッド(3)を具える。エネルギ源(4)によりエネルギが供給される制御モータ(5)をロッド(3)に関連させて配置し、その制御モータ(5)を、長さセンサ(10)及び送受信ユニット(7)と共にマイクロプロセッサ(6)に接続する。交信範囲内にある固定素子(9)に設けられている識別手段(8)を送受信ユニット(7)により非接触で識別可能とし、有底孔内にセットされる固定素子(9)に関連してロッド(3)の有効長(L)を、マイクロプロセッサ(6)及び制御モータ(5)により適応制御可能とする。
(もっと読む)
掘進管先端位置姿勢計測方法及び掘進管先端位置姿勢計測装置
【課題】地磁気が乱れていても、掘進管先端部の水平位置、深さ、傾斜角、回転角、及び方位角を精度よく測定する。
【解決手段】一辺が掘進計画線13と重なるように敷設された電流路22に交流電流を供給する電源21が接続されている。掘進管10先端部に3軸磁界検出器11及び3軸重力方向検出器12が設置されている。重力方向から掘進管先端部の傾斜角及び回転角を求める傾斜角・回転角検出部が設けられている。磁界の交流成分と電源からの同期信号から掘進管先端部の方位角を求める方位角検出部33が設けられている。磁界の交流成分から掘進管先端部の水平位置及び深さを求める水平位置・深さ計測部35が設けられている。
(もっと読む)
回転型位置検出装置
【課題】 検出装置の小型化、簡素化。
【解決手段】 ステータ部10には所定交流信号で励磁されるコイル11,12を配置し、2次コイルは持たない。ロータ部20には回転位置θに応じて各コイル11,12のインピーダンスを変化させるように所定形状の磁性体又は導電体からなる磁気応答部材21を設ける。このインピーダンス変化に基づき所定の回転角範囲にわたって各コイル11,12の端子間電圧が増減変化する。回転位置θの影響を受けない箇所に設けられた交流励磁されるコイル13により、前記増減変化の中点に対応する基準電圧を発生し、各コイル11,12から取り出した電圧と演算することで、零点を中心にして正負に振れる第1及び第2の周期的振幅関数を振幅係数として持つ第1及び第2の交流出力信号sinθsinωtとcosθsinωtを生成する。この振幅位相成分θにより回転位置θが検出される。
(もっと読む)
自動定寸ヘッド
【課題】 バイトが破損したり、測定子を揺動させるエアーシリンダの作動不良等のトラブルや調整ミスによって測定ジョーの先端部に設けた測定子がワークと衝突した場合でも、その衝撃が装置全体に伝わらないようにして、部分的な損傷だけで済ませるようにする。
【解決手段】 ケース本体23に揺動自在に設けられた一対の測定ジョー20と、この測定ジョー20を開閉するエアーシリンダ40と、前記測定ジョー20の先端部に取付けられた測定子22をワーク21に接触させた時の測定ジョー20の位置変化に基づいて測定値を出力する検出器30とを備えてなる自動定寸ヘッドHにおいて、前記測定子22には該測定子22に所定以上の衝撃が加わった時に測定子22の先端部22aが破損する切欠部39を設けた。
(もっと読む)
1,281 - 1,291 / 1,291
[ Back to top ]