
Fターム[2F063DA05]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 測定方法 (3,108) | 測定内容を直接信号に変換して測定 (1,291)
Fターム[2F063DA05]に分類される特許
161 - 180 / 1,291
基板保持装置,基板保持方法、それらを用いた検査装置、及び検査方法
【課題】基板を汚染することなく非接触で保持する基板保持装置では、基板の自重によるたわみが発生したり、使用条件の中で回転動作の風圧による基板のたわみが発生するために、各種処理の障害になっている。
【解決手段】基板の上面を所望の面高さに保持したり、あるいは平面度を保持したりするために、基板上面に基板面の高さを測る非接触の変位センサを設置し、また、載せ台上面には複数の溝と障壁を設け、基板と乗せ台の間にエアーを供給してその圧力によって基板の変位を可能として、さらに、変位センサの出力をフィードバックすることで基板を任意の凸,凹形状に変形したり、平面化することを可能とする構造を持つ基板搭載装置。
(もっと読む)
結合同調回路を使用して2つの物体の相対位置を検知する電磁方法
電磁アクチュエータの変位位置検出装置

【課題】PWM信号で駆動される電磁アクチュエータの変位位置を、簡単な構造及び簡単な検出手段で検出できる装置を提供する。
【解決手段】電磁アクチュエータ1は、可動コア11a、駆動コイル12、検出コイル13を有する。駆動回路22は、PWM信号に従い、駆動コイル12に駆動電流を供給する。検出コイル13は、可動コア11aの変位位置に応じて駆動コイル12との相互結合係数が変化する位置に配置される。サンプリング信号発生回路31は、PWM信号発生回路21が出力するPWM信号に同期してサンプリング信号のタイミングを生成し、同期サンプリング回路32は、このサンプリング信号に同期して検出コイル13の出力電圧をサンプリングし、変位位置検出データを出力する。補正部33は、PWM信号のデューティ比に応じてこれを補正する。
(もっと読む)
溶接接合幅測定方法、電位差計測装置及び溶接接合幅測定システム
【課題】溶接接合幅測定方法において、重ね継手溶接部での接合幅を非破壊で高精度かつ容易に測定できるようにすることである。
【解決手段】上材及び下材の重ね合わせ部において、上材側から溶接接合した重ね継手試験片26の片面の溶接部28を挟む両側位置に一対の電流端子18、20を接触させるとともに、各電流端子18,20の接触部を結ぶ直線上の、溶接部28を挟む両側2点に電位差計16に接続された電位差端子22,24を接触させる。この状態で、一対の電流端子18,20間で電流を流し、両側2点間の電位差を取得する。コンピュータが、取得した電位差から溶接接合幅Wを取得し、溶接接合幅Wを出力する。
(もっと読む)
物理量可視化システムおよび物理量可視化方法
【課題】 ひずみゲージまたは物理量/電気量変換器(以下、「ひずみゲージ等」という)が取り付けられた被測定対象の所定のひずみ量の測定値及びその性質の変化を、該ひずみゲージ等に添着された蛍光剤の発光に変換して視認することができるひずみ量可視化システムを提供すること。
【解決手段】 測定装置2の判断回路22は、ひずみ測定器21の出力、即ち、ひずみゲージ1が検知し、ひずみ測定器21で測定したひずみ量に対応した電気信号により、被測定箇所の物理状態を識別・分類し、該識別・分類結果を示す信号を出力する。測定装置2の光源制御信号発生回路23は、前述の判断回路22が識別・分類した測定箇所の物理状態を示す信号に基づいて、光源電源回路3を駆動するための光源制御信号(光源A用及び光源B用の駆動信号)を出力する。光源電源回路3は、測定装置2からの光源制御信号に基づいて、光源4を制御するための光源用電力を出力する。
(もっと読む)
平面モータ
【課題】価格の安いリニアエンコーダを用いて安価な平面モータを実現する。
【解決手段】プラテン上に載置され該プラテン上をX−Y方向に駆動可能に構成されたスライダを有する平面モータにおいて、前記スライダの位置検出手段として前記スライダに固定したヘッドと前記スライダが駆動されるX−Y方向に配置されたスケールからなるリニアエンコーダを用いた。
(もっと読む)
膨潤試験装置及び膨潤試験方法
【課題】吸湿すると膨張するだけでなく変形し得る試料に対しても正確に膨張率を測定できる膨潤試験装置及び膨潤試験方法を提供する。
【解決手段】膨潤試験装置10は、試料Sの一端部が基準位置に維持された状態で吸湿したときに試料Sの形状を維持する形状維持手段16と、吸湿による試料他端部の初期位置からの変位又はそれに伴う被検知部39の変位を検出する渦電流式変位センサ14と、渦電流式変位センサ14による検出結果に応じて試料Sの膨張量又は膨張率を導出する導出手段20aとを備えている。
(もっと読む)
位置検出システム及びそれを備えた多方向入力装置
【課題】磁界発生部品Yからの外乱による影響を少なくすることができる位置検出システム、及び搭載製品の設計の自由度を向上させ、また、搭載製品の小型化を図ることができる多方向入力装置を提供すること。
【解決手段】位置検出システム1は、基板11上に実装された第1〜第3の磁気検出素子12A〜12Cと、基板11に配設され、基板11に対して移動可能な磁石13と、第1の磁気検出素子12A及び第2の磁気検出素子12Bの出力差で第1方向の出力を求め、第2の磁気検出素子12B及び第3の磁気検出素子12Cの出力差で第2方向の出力を求める制御手段と、を具備し、第1の磁気検出素子12A及び第3の磁気検出素子12Cは、磁石13を中心に対称な位置に配置され、第2の磁気検出素子12Bは、第1の磁気検出素子12A、第2の磁気検出素子12B及び第3の磁気検出素子12Cを結ぶ仮想円弧における中点位置に配置される。
(もっと読む)
変位量検出装置
【課題】 製造が容易であり、生産コストを低減することができる変位量検出装置を提供する。
【解決手段】 検出対象物21が角変位することによって、検出対象物21と第1および第2検出用コイル25a,25bとの相対距離が変化すると、第1および第2検出用コイル25a,25bのインダクタンスが変化し、第1および第2検出用コイル25a,25bのインダクタンスが変化して、発振回路22の発振周波数が変化する。各発振回路22の発振周波数に基づいて、信号処理部23が参照用の電気信号を検出対象物21の変位量に相当する電気信号に変換して出力するので、変位する部分にコイルを巻回する必要がなくなり、製造に高度な加工技術が必要としないので、製造が容易となり、また生産コストを低減することができる。
(もっと読む)
変位量検出装置
【課題】 環境因子の影響を受けずに検出対象物の変位量を検出することができる変位量検出装置を提供する。
【解決手段】 発振回路2は、検出対象物4との相対距離の変化に応じてインダクタンスが変化するコイル5を備え、前記コイル5のインダクタンスに依存する周波数の信号を出力する。信号処理部3は、各コイル5と検出対象物4との相対距離をそれぞれ独立変数として、各発振回路2の発振周波数を予め定める次数の多項式でそれぞれ近似し、この近似した複数の多項式を用いて前記多項式の係数を消去することによって求められる各発振回路2の発振周波数と検出対象物4の変位量yとの関係に基づいて、検出対象物4の変位量yに相当する電気信号を出力する。
(もっと読む)
移動検出装置
【課題】 伝達軸の移動動作に追従して移動部材が移動し、移動部材の位置が検知部で検知される移動検出装置において、移動部材ががたつくことなくスムースに移動できるようにする。
【解決手段】 伝達軸12で移動させられる移動部材13がばね部材14で前方へ付勢されている。移動部材13の下には検知基板21が設けられ、移動部材13の下部に弾性摺動子28aが設けられている。板ばね30は一対の付勢機能部32,32を有し、それぞれの付勢機能部32に、押圧板部33、摺動板部34、中間板部35および第1の湾曲部36と第2の湾曲部37が一体に形成されている。この付勢機能部32,32により、移動部材13が下向きに均一に押圧され、安定した姿勢で移動できるようになる。
(もっと読む)
回転角検出装置およびこれを備えたパワーステアリング装置
【課題】シャフトが径方向にずれた場合に検出誤差を抑制することのできる回転角検出装置およびこれを備えたパワーステアリング装置を提供する。
【解決手段】インプットシャフト41に一体に設けられ、インプットシャフト41の周方向に所定の間隔をもってN極およびS極が着磁された磁性部材44と、磁性部材44に対向配置されてN極およびS極による磁界の変化を検出するMRセンサ45とを備えた回転角センサ50において、MRセンサ45をインプットシャフト41の周方向に異なる位置に複数配置する。
(もっと読む)
センサユニットおよびこれを用いた位置決め装置
【課題】安価かつコンパクトな構成で、ターゲット位置についてギャップセンサの側長域を超える大きな変位を測定できるセンサユニットおよびこれを用いた位置決め装置を提供する。
【解決手段】検出された物理量からターゲット110の位置を計測するセンサユニット100であって、可動方向aおよびこれに垂直な方向bに対して傾きを有する傾斜面116が形成されたターゲット110と、傾斜面116との距離に対応する物理量を検出するギャップセンサ120とを備える。これにより、ターゲット110の可動方向への変位に対して傾斜面116のギャップセンサ120に対する変位は小さくなるため、安価かつコンパクトな構成で、ターゲット位置についてギャップセンサ120の側長域を超える大きな変位を測定できる。
(もっと読む)
位置検出機構
【課題】本発明は、位置検出機構の検出可能な範囲を拡大するということを目的とするものである。
【解決手段】本発明の位置検出機構は、Y軸に垂直な方向の断面における磁化方向が断面位置に寄らず一定であり、X軸方向の対向する端面における磁力線の方向が互いに反対方向である磁石15と、磁石15とZ軸方向で間隔を空けて配置され、XY平面に平行な方向の磁界を感知することができるGMR素子13とを備え、磁石15は、GMR素子13に対して相対的にX軸方向およびY軸方向に移動可能であり、磁石15のX軸方向、Y軸方向およびZ軸方向の外形はY軸方向がもっとも長く、GMR素子13は、磁石15がY軸方向にΔY移動した際の磁石15からの磁束密度の変化ΔBが±5%以内となる位置に位置し、GMR素子13は、磁石15をZ軸方向に投影した領域の外部に位置している。
(もっと読む)
渦電流測定あるいは光学測定を利用して、メタライゼーション処理を実状態で監視する方法
【課題】サンプルに形成された薄膜の除去工程中に該薄膜に関する情報を、渦電流プローブを使用して実状態で取得する方法を開示する。
【解決手段】渦電流プローブに検出コイルを設ける。渦電流プローブの検出コイルに交流電圧を印加する。渦電流プルーブの検出コイルがサンプルの薄膜に近接したときには、該検出コイルで第1の信号を測定する。該検出コイルが、既知の組成を有しおよび/または該コイルから離れて設けられた基準部材に近接する位置にあるときには、該検出コイルで第2の信号を測定する。第1の信号に含まれる利得及び/又は位相の歪みを第2の信号に基づいて校正する。校正した第1の信号に基づいて薄膜の特性値を決定する。上述の方法を実行する装置を更に開示する。加えて、研磨剤でサンプルを研磨し、このサンプルを監視する化学機械研磨(CMP)システムを開示する。このCMPシステムは、研磨テーブルと、研磨テーブル上でサンプルを保持する構成であるサンプルキャリヤと、渦電流プローブとを含む。
(もっと読む)
操作位置検出装置
【課題】検出対象である操作位置の数よりも少ない個数の角度検出センサで操作位置を判別し、また、ユーザに良好な操作感を付与することができる操作位置検出装置を提供する。
【解決手段】シフトポジション検出装置1は、主に、第1及び第2の磁石10a、10bと、第1〜第6のMRセンサ11〜16と、制御部17と、を備える。制御部17は、第1〜第4のMRセンサ11〜14からのHi及びLowの出力と第5及び第6のMRセンサ15、16の出力Lowとの組み合わせに基づいて第1のルート51におけるポジションを判別し、第1〜第4のMRセンサ11〜14からのHi及びLowの出力と第5及び第6のMRセンサ15、16の出力Hiとの組み合わせに基づいて第3のルート53のポジションを判別する。
(もっと読む)
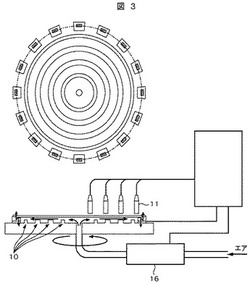
車両の位置を決定するシステム、このシステムを備えた車両及びその方法
車両の位置を決定するシステムは、磁石の磁界強度を測定する複数のセンサと、複数のセンサに対する磁石の位置を決定する演算手段とからなり、複数のセンサは2次元アレイで配置されている。 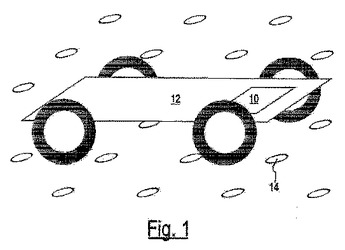 (もっと読む)
(もっと読む)
回転角度検出装置
【課題】自動車のステアリングの回転角度検出等に用いられる回転角度検出装置に関し、簡易な構成で、複数回転する回転体の回転角度が検出可能で安価な回転角度検出装置を提供することを目的とする。
【解決手段】検出体22の内周に雌ネジ部22Cを設けると共に基体30に雄ネジ部32Aを設けて、この雄ネジ部32Aに雌ネジ部22Cを螺合させ、回転体21の回転に連動して検出体22を回転させると共に回転軸方向の上下方向へ移動させ、磁石23Aと磁気検出素子23Bからなる検出手段からの検出体22の回転及び回転軸方向への移動に伴う検出信号S1、S2によって、制御手段29が回転体21の回転角度を検出するように回転角度検出装置を構成する。
(もっと読む)
操作位置検出装置
【課題】検出対象である操作位置の数よりも少ない個数の磁気センサで操作位置を判別し、また、磁気センサの1つが故障しても各操作位置の検出に支障がなく、さらに、ユーザに良好な操作感を付与することができる操作位置検出装置を提供する。
【解決手段】シフトポジション検出装置1は、シフトレバー22に配置された磁石10と、磁気センサとしての第1〜第4のMRセンサ11〜14と、判別部としての制御部15と、を備えて概略構成され、第1〜第4のMRセンサ11〜14の出力の判定結果とポジションを対応させたシフトポジション情報160に基づいて各ポジションを判別する。
(もっと読む)
タッチセンス装置の空間分解能を向上させる方法
【課題】容量性センサ電極の形状と配置を最適化することによって限られた数のセンサを使用するセンス装置の有効な空間分解能を向上させ、かつ/または物理的な範囲を拡張する。
【解決手段】本明細書で開示するのは、容量性タッチセンス装置である。本明細書で説明するタッチセンス装置の1つの態様は、円形または線形の容量性タッチセンス装置において必要なセンサ回路の数の削減であり、一方で1つの物体に関する同等の分解能と絶対位置検出機能は維持される。本明細書で説明するタッチセンス装置の関連の態様は、容量性タッチセンス装置のセンサ・アレイ全体で1つの物体の絶対位置を検出する能力を損なわないように特に選択されたアレイ内の場所で、各センサ回路が複数の電極を共有できるようにする符号化パターンである。
(もっと読む)
161 - 180 / 1,291
[ Back to top ]