
Fターム[2F063DA27]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 測定方法 (3,108) | 自走ロボットにより測定するもの (2)
Fターム[2F063DA27]に分類される特許
1 - 2 / 2
フレキシブルセンサチューブ
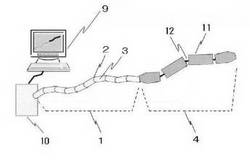
【課題】
瓦礫内探索ロボットが瓦礫に埋もれた人を発見した場合に、その位置を正確に把握することを目的とする。
【解決手段】
瓦礫内探索ロボットが外部の空気コンプレッサーから空気圧チューブやCCDカメラ等の信号情報ケーブルで結ばれる必要性があることに鑑み、瓦礫内探索ロボットと外部の空気コンプレッサーとを結ぶ空気圧チューブやロボットに取り付けられたCCDカメラ等の信号情報ケーブルを多関節構造のチューブで覆い、各関節角をポテンショメータ等のセンサにより検出し、そのセンサの出力信号から多関節構造のチューブの全体形状を算出することにより、多関節構造のチューブの先端部に位置する瓦礫内探索ロボットの位置を同定する。
(もっと読む)
パイプラインの欠陥位置特定方法並びにパイプラインのマーカー位置検出方法及び装置

【課題】 パイプラインの欠陥位置を高精度に特定することができるパイプラインの欠陥位置特定方法を提供する。
【解決手段】 パイプライン1の中を走行する検査ピグ3によりパイプラインの欠陥及びマーカー位置を検出し記録する方法において、特定周波数の交流磁場を発生する発信コイル21をパイプラインの外側にパイプラインに対して垂直に設置し、前記検査ピグにはパイプラインに平行になるように受信コイル31を設け、この受信コイルにより前記交流磁場を検出し、その検出した磁場信号のうち特定周波数の信号をバンドパスフィルタ33により取り出し、当該信号を包絡線検波して得られた波形をマーカー信号として欠陥信号との相対位置関係を対応づけて記憶し、このマーカー信号の波形中心位置を基準に欠陥位置までの距離を求める。
(もっと読む)
1 - 2 / 2
[ Back to top ]