
Fターム[2F063DD01]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 検出器の組み合せ (1,287) | 同一種類の検出器を用いるもの (1,165)
Fターム[2F063DD01]の下位に属するFターム
Fターム[2F063DD01]に分類される特許
1 - 16 / 16
磁気センサ、磁気エンコーダ、磁気エンコーダモジュール、レンズ鏡筒

【課題】より高精度の磁界検出を可能とする磁気エンコーダを提供する。
【解決手段】この磁気エンコーダは、長手方向において所定のピッチで着磁された帯状の磁気メディアと、その磁気メディアの表面上を長手方向に沿って摺動しつつ、磁気メディアからの磁界を検出する磁気センサ1と、磁気センサ1を支持し、磁気センサ1を磁気メディアの表面に付勢するサスペンションとを備える。磁気メディアは、例えば円筒状の回転体の外面に、その長手方向が回転体の回転方向と一致するように取り付けられている。磁気センサ1は、基体21上に設けられた磁気抵抗効果素子22と、それを覆う第2および第3の絶縁層Z2,Z3とを有する。磁気メディアと対向する対向面1Sは、磁気メディアの長手方向に沿った断面において、磁気抵抗効果素子22の配置された中央領域WR1が最も突出した形状を有する。
(もっと読む)
真空用モーター、真空用ロボット

【課題】真空排気装置に接続された空間に不純物ガスを放出しない真空用モーターと真空用ロボットを提供する。
【解決手段】
筒部材11と、回転軸12と、磁石14と、コイル15と、信号を生成する符号が、回転軸12の中心軸線を中心とする円周に沿って表面に配置された回転板21aと、信号を検出できるセンサ22aとを有し、回転板21aが配置された空間は真空排気装置42に接続されて真空排気される真空用モーター10aであって、内部にセンサ22aが配置されたセンサ室24aと、信号を透過する透過窓23aとを有し、透過窓23aはセンサ室24aの開口を塞ぐように設けられ、センサ室24の内部空間は回転板21aが配置された空間から分離され、センサ22aから放出された不純物ガスは真空排気装置42に接続された空間に放出されない。
(もっと読む)
角度測定装置及び方法
【解決課題】物体、動物、人間において形成される角度、具体的には人間における各関節部の角度や、各種装置、構造物などの構成要素同士が形成する角度など、複数の部位のなす角度を形成する複数の部位それ自体が静止状態であっても、積分処理を行わずにそのなす角を測定可能な角度測定装置及び方法を提供する。
【解決手段】複数の部位1,2のなす角度を求める角度測定装置を、部位1,2にそれぞれ取り付ける地磁気センサ11,12と、地磁気センサ11,12から出力したデータに基づいて複数の部位1,2がなす角度を求める処理部15と、部位1,2への地磁気センサ11,12の取付態様の違いを補正するための補正情報を格納する補正情報格納部17とを備える。処理部15が、補正情報格納部17に格納した補正情報を参照して、各地磁気センサ11,12から出力されたデータを補正し、複数の部位1,2のなす角度を求める。
(もっと読む)
磁気によって生じた梁要素の変形に基づく角度位置の検出
静磁場に対する器具の角度位置を検出するためのセンサは、柔軟性の梁要素、電磁装置、及び測定装置を備えている。梁要素は、その一端部分で器具に連結されているとよく、梁要素が非屈曲状態にあるときにセンサ軸に沿って延びた状態になっている。電磁装置は、梁要素に連結されており、かつセンサ軸と整列したセンサ磁場を生成するように構成されている。測定装置は、梁要素に連通しており、かつ梁要素の屈曲の大きさに関する梁要素の特性を測定するように構成されている。センサは、器具を操作する前に器具を所望の角度に設定し、該器具が操作中に所望の角度からズレていないかどうかを判断するために、利用されるとよい。器具の例として、磁気共鳴実験法に利用されるようなプローブ回転モジュールが挙げられる。 (もっと読む)
回転角度検出装置
【課題】 内燃機関の吸気可変システムに使用されるバルブの全閉位置と全開位置との判別を的確に行うことを課題とする。
【解決手段】 ロータプレート4は、その回転軸線を中心とした同一円周上において、全閉位置に対応した部位にマグネット5を設置し、且つ全開位置に対応した部位にマグネット6を設置している。また、マグネット5、6は、樹脂磁石よりも安価なフェライト磁石であり、幅方向の寸法(サイズ)が異なる相似形状に形成されている。これにより、安価なON−OFFタイプの磁気センサ7を用いた場合でも、バルブ全閉時の磁気センサON電圧出力時間とバルブ全開時の磁気センサON電圧出力時間とを異ならせることができるので、全閉位置と全開位置との判別を的確に行うことができる。また、開オーバーターンなのか、あるいはバルブの中間固着故障なのかの識別を容易に行うことができる。
(もっと読む)
人体腔内壁の三次元測定方法、並びにその装置及びシステム
駆動信号励起のもと、分離可能なフィールドを発生する少なくとも一つのフィールド発生装置と、前記目標装置に位置し、前記分離可能なフィールドを検出しセンサ信号を発生する少なくとも一つのフィールドセンサと、前記フィールド発生装置に駆動信号を送信し、前記フィールドセンサ信号の出力を検出して、前記目標装置のセンサの存在する位置の五次元位置及び配向座標データを取得する位置決め信号処理装置と、を含む、人体腔内壁の三次元測定方法、並びにその装置及びシステム。 (もっと読む)
ストロークセンサ、アクチュエータ及び車両用ヘッドライト装置
【課題】移動体の移動位置を線形に検出でき、しかも、強度的に強い構成にできるとともに成形が容易で安価に製造できるストロークセンサ、アクチュエータ及び車両用ヘッドライト装置を提供する。
【解決手段】センサマグネットMGは、ホールIC52の検出面52aと相対向する対向面が、前後方向に同一曲率半径の円弧状の円弧面S1に形成されている。円弧面S1は、センサマグネットMGの長手方向の中間位置P0を垂直に通過する直線L上であって、ホールIC52と反対側の線上に、該円弧面S1の曲率半径rの中心点Oが存在する円弧面である。ホールIC52は、検出面52aに対して垂直方向の成分の磁束密度を検出し、検出面52aに対して平行の磁束は検出しない。
(もっと読む)
磁気式角度センサ
【課題】一対の磁気抵抗素子の薄膜ヨークが近接しても外部磁界の検出方向のずれの発生が抑制される磁気式角度センサを提供する。
【解決手段】磁気式角度センサ10によれば、基板14上に配置された一対の第1磁気抵抗素子16および第2磁気抵抗素子18が、それらの一対の薄膜ヨークの磁化容易方向が90°よりも所定角度2θだけ小さい角度Aとなるように予め配置されていることから、一対の第1磁気抵抗素子16および第2磁気抵抗素子18の薄膜ヨーク40、42が相互に近接させられてそれら薄膜ヨーク40、42に誘導される磁束が相互に影響するときに、一方の第1磁気抵抗素子16の一対の薄膜ヨーク40、42の磁化容易方向と他方の第2磁気抵抗素子18の一対の薄膜ヨーク40、42の磁化容易方向とが相互に略直角を形成するようになるので、外部磁界Hの検出方向のずれの発生が好適に抑制される。
(もっと読む)
角度センサ
【課題】検出対象であるステアリングシャフトの回転運動をマグネット(着磁部)の回転運動に変換する伝達機構の構造を簡素化することにより、部品点数の削減および製造コストの軽減を図り、かつ、設置レイアウトを改良することにより、異音の軽減および耐久性の向上を図った角度センサを提供する。
【解決手段】電動パワーステアリング装置に搭載され、操舵角を検出する角度センサにおいて、ステアリングシャフトと一体に回転するように設けられた回転部材の外歯ギヤに噛合する角度センサギヤと、角度センサギヤが基端部に固定され、角度センサギヤと一体に回転する角度センサシャフトと、角度センサシャフトの先端部に固定され、角度センサギヤおよび角度センサシャフトと一体に回転するマグネットと、マグネットの磁界変化に基づいて操舵角を検出する角度センサ基板とを備え、ウォームホイールを収容するギヤボックスのカバー部材に搭載されるようにした。
(もっと読む)
焼き入れ深さ測定装置および焼き入れ深さ測定方法
【課題】測定対象物の温度が変動しても精度良く測定対象物の焼き入れ深さを測定することが可能な焼き入れ深さ測定装置および焼き入れ深さ測定方法を提供する。
【解決手段】複数の異なる周波数の交流励磁信号が印加されることにより測定対象物2に複数の異なる周波数に対応する浸透深さを有する誘導電流(渦電流)を発生させる励磁コイル11と、測定対象物2に発生する誘導電流に起因する検出信号を検出する検出コイル21と、複数の異なる周波数の交流励磁信号とこれに対応する検出信号との位相差φを算出し、浸透深さに対応する測定対象物2の表面からの深さと位相差φとの関係を求め、位相差φの上端値φUと下端値φLとの差分値Δφ(=φU−φL)に基づいて測定対象物2の焼き入れ深さを算出する制御装置30と、を焼き入れ深さ測定装置1に具備した。
(もっと読む)
位置検出システム、医療装置誘導システムおよび位置検出方法
【課題】外部からの電力供給により交番磁界を発生する一のマーカと、該交番磁界の周波数と同一またはその近傍に共振周波数を有する共振回路を備えた他のマーカとが共に存在した場合であっても、一のマーカの位置または方向を正確に検出する。
【解決手段】外部からの電力供給により第1の位置算出用周波数を有する第1の交番磁界を発生する第1のマーカ4と、位置算出用周波数と同一の共振周波数を有する磁気誘導コイル5を搭載した第2のマーカ3と、該第2のマーカ3の作動範囲の外部に配置され、第1の位置算出用周波数において磁界を検出する磁界検出部13と、検出された磁界から、第1の位置算出用周波数を有するとともに第1の交番磁界と同一の位相を有する第1の検出磁界成分を抽出する抽出部24と、抽出された第1の検出磁界成分の強度に基づいて第1のマーカ4の位置および方向の少なくとも一方を算出する位置方向解析部22とを備える位置検出システム1を提供する。
(もっと読む)
回転角検出装置
【課題】 片方のレゾルバセンサが故障した場合でも、正常側のレゾルバセンサを用いて絶対角を検出する。
【解決手段】 回転部材を回転可能範囲にわたって回転させたときn回の周期波形信号を出力する第1レゾルバセンサとm(m≠n)回の周期波形信号を出力する第2レゾルバセンサとを備え、両レゾルバセンサの検出した相対角θa,θbの相対角差θabに基づいて回転部材の絶対角度θを算出する。また、回転部材の回転可能範囲を各レゾルバセンサの信号出力周期に応じた分割数で分割して得られる複数の分割領域のうちで、回転部材の回転位置が属する所属分割領域を各レゾルバセンサの信号出力の推移に基づいて導出する。片方のレゾルバセンサが故障したときには、正常側のレゾルバセンサの出力値と所属分割領域とから回転部材の絶対回転角度を算出する。
(もっと読む)
半導体加工ツールにおける静電容量距離検出
ワイヤレスセンサ(10、100、200)は、半導体加工環境内で対象物体(14)に対する距離を検出するための少なくとも一つの静電容量板(10、12;102、104)を包含する。センサ(10、100、200)は、内部電力源(28、342)およびワイヤレス通信(362)を包含し、静電容量板(10、12;102、104)を使用してもたらされる距離および/または平行度測定をワイヤレスで外部装置に提供することができる。 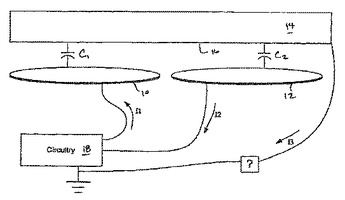 (もっと読む)
(もっと読む)
事務機器のローラ回転検出装置付き軸受およびローラ駆動装置
【課題】 事務機器における感光ドラムや送りローラなどのローラを支持する軸受であって、省スペース化が可能で高分解能な絶対角度検出ができ、組立性が良く環境変化にも強いローラ回転検出装置付き軸受を提供する。
【解決手段】 このローラ回転検出装置付き軸受20は、事務機器における感光ドラムまたは送りローラ等のローラ2の回転軸3を支持する軸受である。軸受の内輪21またはローラ軸3に、回転中心O回りの円周方向異方性を有する磁気発生手段11を設ける。また外輪22には、前記磁気発生手段11に対向して磁気アレイセンサを取付ける。
(もっと読む)
多方向距離無接触測定器
複数の誘導素子(1、4、7)を有し、電気的導体(2、22)の多方向における距離(10、20)を無接触で測定する装置。複数の誘導素子(1、4、7)のうち、少なくとも一つは本質的に電気的導体(2)の周りに配置されている。他の誘導素子、あるいは他の磁場センサー(4、7)は当該誘導素子(1)の近傍に配置されている。このような特徴を有する装置は、多軸誘導センサーを単一の回路基板上に集積することを可能とする。 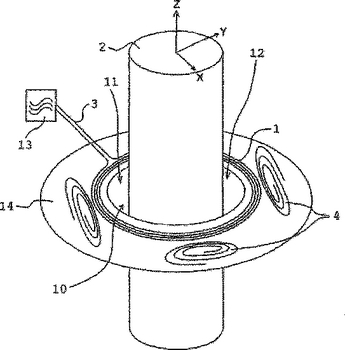 (もっと読む)
(もっと読む)
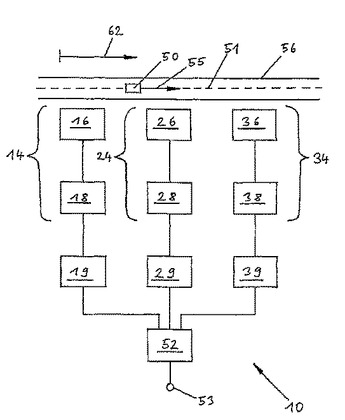
ターゲット物体の経路を記録する装置及び方法
本発明は、特に金属からできたターゲット物体の経路を記録する装置に関しており、少なくとも2つの検出装置を備えており、これらはモニタリングのために前記経路からある距離に沿って、直ぐに隣接する検出装置の感度曲線が少なくとも部分的にオーバーラップするように配置され、それによって前記検出装置の各々は少なくとも一つのインダクタンスと少なくとも一つの発振器とを備えており、ターゲット物体による発振器の減衰に依存して分離信号を提供する。少なくとも一つの変換器装置が提供され、検出装置と協働して、検出装置によって記録された減衰をアナログ信号に、特に電流及び/又は電圧信号に変換し、且つ、単数又は複数の変換器装置と協働して、それぞれの検出装置に関するアナログ信号からターゲット物体に対する位置の決定及び出力のための少なくとも一つの分析ユニットである。
 (もっと読む)
(もっと読む)
1 - 16 / 16
[ Back to top ]