
Fターム[2F063GA01]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 磁気的手段を用いた検出器 (1,967) | 電磁誘導型、コイルによる検出 (846)
Fターム[2F063GA01]の下位に属するFターム
インダクタンスの変化を検出 (379)
差動変圧器型 (45)
シンクロ (2)
レゾルバ (87)
インダクトシン (2)
マグネシン
巻線の形状、構造 (68)
固定子巻線のないもの
固定子巻線に直流が流れるもの (2)
固定子巻線に交流が流れるもの (31)
移動子、回転子に巻線のないもの (11)
移動子、回転子の巻線に直流が流れるもの
移動子、回転子の巻線に交流が流れるもの (20)
コアの形状、構造 (31)
コア位置をずらしたもの
コア材料 (8)
Fターム[2F063GA01]に分類される特許
21 - 40 / 160
測定プローブ
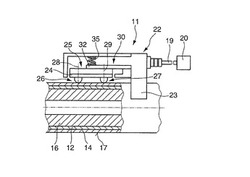
【課題】 物体上の複数のコーティングを簡単および確実な方法で非破壊で検査できる測定プローブを提供すること。
【解決手段】 物体(16)の測定表面(17)への接触のための少なくとも1つのセンサ要素を備えた測定ヘッド(26)と、ハウジング(22)によって少なくとも部分的に囲まれる測定ヘッド(26)を受ける支持デバイス(24)とを備えた、物体(16)上の薄膜層の厚さの非破壊測定用測定プローブであって、基本の測定ヘッド(26)に隣接し、それから分離した少なくとも1つの付加の測定ヘッド(27)が、支持デバイス(24)に配置され、且つ、基本の測定ヘッド(26)とは独立して制御され得るよう構成されている。
(もっと読む)
電磁ポインターの傾斜角検知方法

【課題】本発明は電磁ポインターの傾斜角検知方法を提供する。
【解決手段】まず、電磁ポインターをX/Y軸上にあるXn/Ynアンテナの上に提供する。次は、Xn/Ynアンテナを中心として、両側に位置されている複数のアンテナがスキャンされる。次に、スキャンされた両側のアンテナの誘導信号の分布に基づいて、両側で必要とするサンプルのアンテナ数aが決められる。次は決められたアンテナ数aに基づき、中心の両側に位置されるa個のアンテナがオンされ、電磁ポインターの信号が取り込まれる。最後に両側に位置されるアンテナのサンプル信号に基づき、電磁ポインターの傾斜角が判断される。
(もっと読む)
測位装置
【課題】スリップフォーム成型機の施工時にセンサロープの張設を不要とする測位装置を提供する。
【解決手段】スリップフォーム成型機におけるモールドの施工位置を測位する測位装置は、モールドの施工高さ及び施工方向の基準として、上下に並行して延設された2本の導線11bと、給電により導線11bからそれぞれ生じる磁界によって誘導電流I1,I2を発生する磁界検知回路13と、誘導電流I1,I2に基づいて上下位置を測位する上下方向測位回路14と、誘導電流I1,I2に係る電圧に基づいて左右位置を測位する左右方向測位回路15と、を含んで構成される。
(もっと読む)
非破壊測定用治具、及びそれを用いたコンクリート被り厚測定装置、SC杭におけるコンクリート被り厚測定方法
【課題】内径が小さく長尺な既製中空管の奥部でも、簡便かつ精度良く内壁側からの非破壊測定を行える非破壊測定用治具、該治具を用いたコンクリート被り厚測定装置、該測定装置によるSC杭におけるコンクリート被り厚測定方法を提供する。
【解決手段】SC杭100の中空部104内には、被り厚Xを測定すべくコンクリート被り厚測定装置IIが設置されている。コンクリート被り厚測定装置IIは、非破壊測定用治具と鉄筋探査機からなる。中空部104の断面中心付近には、回転ロッド200が配され、この回転ロッド200の先端部(SC杭の奥部)には測定部が接続され、その近傍にセンターライザー部が接続され、SC杭100の端面開口部には操作部が接続され、これらで前記非破壊測定用治具を構成している。
(もっと読む)
被験者に関する情報を送信するための多モード方法およびシステム
【課題】被験者に関連する生理学的情報、パフォーマンス情報および状況情報を示すシグナルを送信するための多モード通信手段を提供する。
【解決手段】例示的な実施形態において、多モード通信手段は、単一無線モードでは効果がないであろう広範囲の設定(settings)において獲得されるべき外部モニタリング機器への接続を可能にする多重無線サブシステム(またはモード)を含む。更に、本発明の多モード通信手段をリアルタイムデータ処理と組み合わせることにより、ユーザーに関係があると決定されたデータが識別された場合のみ通信の機能性に関与することが可能となる。
(もっと読む)
電磁追跡システム用アクティブマーカ装置
患者に対する画像誘導処置に使用可能な装置が開示される。装置はEMセンサーアセンブリ、フレームアセンブリ(例えば共通点へ突出する複数の脚を備えるベース部)および複数の取り付け部材を備える。各取り付け部材は、前記フレームアセンブリを患者の身体上の所定位置に固定するために、患者の皮膚に取り外し可能に(例えば接着して)固定され、かつフレームアセンブリに連結されるように構成されている。EMセンサーアセンブリはフレームアセンブリに取り外し可能に固定される(例えば、フレームアセンブリのソケットに枢動可能にスナップ嵌合する)ように構成されている。撮像基準点を確立するために、装置は、容易に撮像されるように構成された複数の可視化可能要素(例えば金属ボール)と、非対称に配置された複数のアパチャとを備え、そのアパチャを介して患者の皮膚に目印としての入れ墨を施すことができる。  (もっと読む)
(もっと読む)
測定値のサブセットを識別する方法および装置、対象物の位置を特定する方法およびシステム、これらの方法のための記録媒体
磁気擾乱素子によって擾乱されている測定値を含む測定値サブセットを識別する方法であって、a)磁界を放射するステップ、およびN個の実際の測定値のセットを求めるために、N組の単軸磁界源/単軸磁気変換器の対を用いてこれらの磁界を測定するステップ(70)と、b)N個の測定値の中のサブセットMiに基づいて、対象物の位置の推定値Piを算出するステップ(72)と、c)推定位置Piと、対象物の位置をN個の測定値から成るセットに関連付ける少なくとも1つの直接モデルとに基づいて、N個の測定値を推定するステップ(74)と、d)ステップc)中に推定された測定値をステップa)中に求められた実際の測定値と比較することによって、この測定値サブセットMiが擾乱測定値を含むか否かを判定するステップ(76)とを有する。 (もっと読む)
デジタイザシステムに使用するためのスタイラス
【課題】圧力検出を行う共振型スタイラスを提供する。
【解決手段】スタイラス端、スタイラス端に適用される圧力に応じて移動する、スタイラス中に位置される少なくとも1つの移動要素、および前記移動要素の運動時に弾性要素に捩り力が適用され、前記弾性要素の捩り力が前記移動要素の運動に対抗し、前記移動要素を前記運動の前に存在した状態に戻すように、前記少なくとも1つの移動要素の外周の周りに適合され、かつスタイラスの外被に連結される少なくとも1つの弾性要素、を含む、デジタイザシステムに使用するためのスタイラスとする。
(もっと読む)
金属物の形状判定方法
【課題】金属物の形状を判別して検知できる金属物の形状判定方法を提供する。
【解決手段】センサーコイル5,6を用いて、被検出物2中に混入した金属物を検知する。センサーコイル5,6から出力される検出信号を信号処理解析して、金属物の形状を判定する。解析のとき、被検出物2がセンサーコイル5,6に入力するタイミングから、センサーコイル5,6を通過して出ていくタイミングまでの信号を規格化して規格化信号にし、規格化信号の中に、3以上のピーク値があるとき、針であると判定する。規格化信号の中に、2個のピーク値のみがあるとき、鉄粉であると判定する。
(もっと読む)
コイル、位置指示器、位置検出装置及びコイル巻回方法
【課題】位置指示器のコイルからの不要な電界の放射を抑えること。
【解決手段】コイル1は、一端部より他端部へ所定回転方向に巻回された第1の導線3aと、他端部より一端部へ所定回転方向に巻回された第2の導線3bとからなる。第1の導線3aと第2の導線3bは、第1の導線3aの他端部で接続され、巻回された第1の導線3aと第2の導線3bは、交互に隣接し配置される。
(もっと読む)
磁界擾乱体の検出方法および検出器、物体の位置の特定方法および特定システム、およびこれらの方法のための記録媒体
【課題】簡単な計算によって、磁界放射体から放射された磁界に対する磁界擾乱体の存在を容易に検出することができる方法を提供する。
【解決手段】この方法は、相異なる所定の位置に配置された少なくとも2つの3軸センサによって、磁界放射体から放射された磁界を測定するステップ(52)と、3軸センサの各々に対して、3軸センサによって測定された磁界から、磁界放射体の幾何学的中心と、3軸センサの幾何学的中心とを通る軸と同一直線上の方向ベクトルの座標を特定するステップ(54)と、各々が方向ベクトルの1つと同一直線上にある複数の軸間の最短距離が、あらかじめ定められた限界値未満であるか否かを検証するステップ(56)と、最短距離が、限界値未満でない場合には、磁界擾乱体が存在しているという通知を行うステップ(64)と、限界値未満である場合には、この通知を行わないステップ(66)とを含んでいる。
(もっと読む)
特にCPR時の胸部パラメータを測定する方法及びシステム
本発明は、人、特に人の胸部に配置される測定部の位置を監視するシステムに関し、本システムは、所定の周波数で振動する磁界を発生し、例えば、胸部から背中までのような人の反対側に位置するように構成される駆動部を含み、測定部は、磁界強度を測定するように構成され、システムは、測定部と駆動部との距離を算出する算出手段を含む。 (もっと読む)
媒体に封入されたオブジェクトの検出方法、ならびに該検出方法を実施するための測定装置
【課題】媒体に封入されたオブジェクトを可能な限り精確に位置検出できることを保証できる、該オブジェクトの検出方法を提供すること。
【解決手段】受信導体ループシステムによって検出された測定信号の信号強度に依存して、該検出された測定信号の信号強度が第1の閾値を超えた場合、該受信導体ループシステムによって検出される測定信号の強度が低減されるように、送信コイルに供給される該測定信号の周波数を変化させ、パルス幅変調を行うデジタル周波数発生器から、前記送信コイルを駆動制御する信号を間接的または直接的に取り出し、該周波数発生器のデューティ比を、検出された前記測定信号の信号強度に依存して適切に変化させることを特徴とする方法。
(もっと読む)
金属物体認識方法及び金属物体認識装置
【課題】部材内部の金属物体を外部から簡易に把握する。
【解決手段】計測装置1の中に、連続的に万遍なくn個のコイルCが配置される。コイルCは、励磁コイルCaと、検出コイルCbとからなる。励磁コイルCaは、交流電圧の印加を受けて、外部に磁力線を発する。検出コイルCbは、励磁コイルCaの発した磁力線を受けて、相互誘導作用による電圧を生じる。そこで、励磁コイルCaと、検出コイルCbとの組合せ数であるnC2通りの電圧値を計測し、計測した電圧値に基づいて、柱状部材2内部の配筋出来形の状態をデジタルデータとして取得する。例えば、コイルCが12個あれば、66通りの電圧値が得られる。各電圧値を計測する際に、発電側の励磁コイルCaと、受電側の検出コイルCbとの組合せを切り換えるには、スイッチング回路(切換回路)を用いる。
(もっと読む)
凶器類判別装置
【課題】刃物類等の凶器類等を隠し持った人が接近したことを察知することができる凶器類判別装置を提供する。
【解決手段】判別装置KSは、鉄類からなる金属類が凶器類に該当するか否かを判別することができる。判別装置KSは、金属類が形成する残留磁化をピコテスラオーダーの検出分解能で検出できるMIセンサSSを備えている。判別装置KSの制御装置CPは、MIセンサSSが検出した残留磁化による磁場分布を判別することで、凶器類になりえるか否かを推定することができる。制御装置CPはこの推定結果を報知することができる。
(もっと読む)
位置検出装置及びセンサユニット
【課題】安価に構成できると共に位置検出精度を向上した位置検出装置を提供する。
【解決手段】電磁誘導型位置検出装置の、コイル基板の直下に配される磁路シートを、磁性リボンを斜めに重ね合わせて構成した。このように磁路シートを構成することにより、磁性リボンの繋ぎ目近傍における、センサコイルの感度の変動を抑制することができる。したがって、位置指示器検出感度が高く、位置検出精度が高く、且つノイズに強い、高性能な位置検出装置を実現できる。
(もっと読む)
位置検出センサ
【課題】検出素子数を増やさずに出力の高分解能化を図る。
【解決手段】位置検出センサ1は、実装ヘッドH1〜H15と、仮想出力算出部11と、最端検出素子決定部12と、検出信号生成部13とを備える。実装ヘッドH1〜H15は、ガイドテープGTの幅方向に所定の間隔をあけて配置され、ガイドテープGTの磁束を検出する。仮想出力算出部11は、実装ヘッドH1〜H15の出力結果に基づいて、隣り合う実装ヘッド間に配置される仮想ヘッドの出力を補間により算出する。最端検出素子決定部12は、各実装ヘッドH1〜H15及び各仮想ヘッドのうち、出力が所定の閾値以上であって最端に位置する最端検出素子を決定する。検出信号生成部13は、最端検出素子の位置に基づいてガイドテープGTの位置情報を示す位置検出信号を生成する。
(もっと読む)
漏洩磁束検出型回転位置検出装置を組み込んだ液密サーボモータ装置
【課題】小型化、液密構造に適し、温度ドリフト補償に優れ、検出信号の伝送路のインピーダンス変化の影響を受けにくい回転位置検出装置を備えたサーボモータ装置を提供する。
【解決手段】サーボモータ1と共に液密にケーシング4内に収納されたセンサ10は、サーボモータ回転子から生じる漏洩磁束を検知する複数のコイルを備え、各コイルに対応して高透磁率磁性体がそれぞれ近接配置され、該高透磁率磁性体においては回転位置に対応する漏洩磁束の変化に応じて磁気飽和が生ぜしめられる。各コイルは磁気飽和の変化特性に応じて、回転位置に対応した振幅関数を持つ交流信号を出力する。正弦関数的振幅特性の2つのコイルは漏洩磁束の変化に対して互いに逆相となるように配置され、余弦関数的振幅特性の別の2つのコイルも同様に互いに逆相となるように配置される。この出力交流信号を合成して、電気的位相によって回転位置を示す検出信号を生成する。
(もっと読む)
建造物メッキ膜厚測定方法
【課題】鉄塔等の建造物のメッキ膜厚を適切に測定することで測定値と実態とのずれをなくして、塗装作業の平準化を図る上で適切な塗装計画を策定することが可能な建造物メッキ膜厚測定方法を提供する。
【解決手段】建造物に使用されるナット3の測定面(側面3a)を研磨する下地処理工程と、ナット3の測定面の所定部位に対して電磁膜厚計により所定回数の膜厚測定を行い、所定の上限値を超える測定値を除去して有効測定値を選別する有効測定値選別工程と、有効測定値選別工程で選別された有効測定値をナットのねじの呼び、及び、ナットの解体の有無に応じて補正する測定値補正工程と、測定値補正行程で補正された有効測定値の平均値を算出する測定値平均化処理工程とを具備する。
(もっと読む)
吊られた金属帯の振動の減衰および形状の制御のための方法およびシステム
本発明によれば、吊られた金属帯の振動の減衰および形状の制御のための方法が提供される。この方法は、複数の非接触のセンサ3によって金属帯1までの距離を測定して、距離測定値を供給するステップと、距離測定値にもとづいて偏向プロファイルを生成するステップと、偏向プロファイルを幾つかの基本形状I、II、III、IV、Vへと分解するステップと、複数の非接触のアクチュエータm12a、m22a、・・・、mi2a、・・・、mn2a、およびm12a’、m22a’、・・・、mi2a’、・・・、mi2a’によって偏向プロファイルを制御するステップとを含んでおり、制御するステップが、基本形状I、II、III、IV、Vの各々について、対応する力プロファイルの組合せを供給するステップを含んでいる。  (もっと読む)
(もっと読む)
21 - 40 / 160
[ Back to top ]