
Fターム[2F063GA01]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 磁気的手段を用いた検出器 (1,967) | 電磁誘導型、コイルによる検出 (846)
Fターム[2F063GA01]の下位に属するFターム
インダクタンスの変化を検出 (379)
差動変圧器型 (45)
シンクロ (2)
レゾルバ (87)
インダクトシン (2)
マグネシン
巻線の形状、構造 (68)
固定子巻線のないもの
固定子巻線に直流が流れるもの (2)
固定子巻線に交流が流れるもの (31)
移動子、回転子に巻線のないもの (11)
移動子、回転子の巻線に直流が流れるもの
移動子、回転子の巻線に交流が流れるもの (20)
コアの形状、構造 (31)
コア位置をずらしたもの
コア材料 (8)
Fターム[2F063GA01]に分類される特許
121 - 140 / 160
配管肉厚測定装置およびこれに用いられるシース型センサ
【課題】低コストで簡単に製造することができる、常設可能な配管肉厚測定装置およびこれに用いられるセンサを提供する。
【解決手段】強磁性を有する配管Pの肉厚を測定する配管肉厚測定装置2において、配管Pの周囲にコイル状に巻回された励磁巻線10と、この励磁巻線10に低周波数の励磁電流を印加する電流印加部61と、励磁巻線10とともに配管Pの周囲にコイル状に巻回された検出巻線11と、励磁電流に基づきこの検出巻線11に生じる誘導起電圧を測定する電圧測定部62とを備える。
(もっと読む)
スタイレット器具及びその製造方法
装置の内腔に少なくとも部分的に配置し得るスタイレットを開示する。かかるスタイレットは、近位端、遠位端及び少なくとも1つの磁性材料を具える伸長体を含む。ある種の実施形態において、伸長体は、少なくとも1つのコア要素、かかるコア要素の少なくとも一部の周囲に配設した管状部材、及び/又は、コア要素の少なくとも一部の周囲に配設した少なくとも1つの支持部材を更に含む。また、コア要素と管状部材との間にマトリックス材が配設され、伸長体内に磁性材料が保持される。また、スタイレットを含むカテーテルアセンブリと、その製造方法が開示されている。 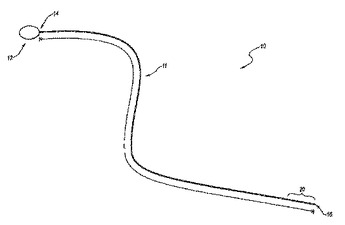 (もっと読む)
(もっと読む)
位置検出装置、及び、それを備えた液晶表示装置

【課題】位置指示装置によって選択された位置を安定して検出するとともに、位置検出装置、及び、それを用いた液晶表示装置を提供する。
【解決手段】複数の表示画素PXがマトリクス状に配置された液晶表示パネル10と、液晶表示パネル10の背面に配置された面光源装置20と、面光源装置20の背面に配置された位置検出装置30と、を備え、位置検出装置30は、平面上に配列された複数のコイルセンサXn、Ymを備えたセンサ部302と、複数のコイルセンサXn、Ymを順次選択する選択回路304と、選択回路304によって選択されたコイルセンサに入力される出力信号を発生する発振器322と、選択回路304によって特定の位置に配置されたコイルセンサXn、Ymが選択されたときに、発振器322の出力信号を強くする手段と、を備えた液晶表示装置。
(もっと読む)
電磁デジタイザセンサアレイ構造
【課題】 従来の電磁デジタイザの欠点を克服するセンサアレイのセンサーセグメントの新しい構造を提供する。
【解決手段】 センサーセグメントは、導線、配線、またはワイヤーの2次元ネットワークを含むほぼ縦方向の構造を含む。2つ、または2つ以上の導線が平行に構造される。感度を高めるために、隣接する導線が縦方向の構造に沿って相互接続される。相互接続線は、隣接の平行導線間の角度に対応する短い導線の形状であることができる。センサーセグメントは小型化されることで、半導体製造プロセスを用いてディスプレイモジュールの中に統合されることができる。センサアレイは、重複の平行アレイに配列された半ループ(またはU型)、または全ループのセンサーセグメントを含むことができる。
(もっと読む)
磁界変調する角度測定装置とその作動方法
【課題】本来の測定作動中にも走査間隔の極めて正確な決定が可能とされるように、磁界変調する特に誘導式角度測定装置とその作動方法を提供する。
【解決手段】走査ユニット23、測定部分13、走査ユニット23と測定部分13が走査間隔Dで互いに相対的に回転自在に配置されていて、走査ユニット23により角度依存型出力信号A,Bが発生でき、その出力信号が評価電子部25で再処理できる評価電子部25とを包含する磁界変調する角度測定装置。出力信号A,Bの信号振幅を決定するユニット25.12aを包含しさらに、温度センサー25.11を包含し、そのセンサーによって温度Tが角度測定装置において決定できている。この角度測定装置は温度Tと信号振幅に基づいて走査間隔Dが決定できる形式で構成される。さらに、この種の角度測定装置を作動する方法が挙げられており、特に軸1の長さ変更Δを決定することができる。
(もっと読む)
位置測定装置
本発明は位置測定装置、特に媒体内に閉じ込められた対象物を検出するための手持式位置測定装置(10)であって、ケーシング(12)と該ケーシング(12)内に配置されたセンサ装置と前記ケーシング(12)を貫く開口(24)とを有する形式のものに関する。本発明によれば前記開口が少なくとも1つの、測定装置内に配置された光源(34)によってパルス状に照明可能である。この場合、照明の繰返し値は検出された対象物に関連している。 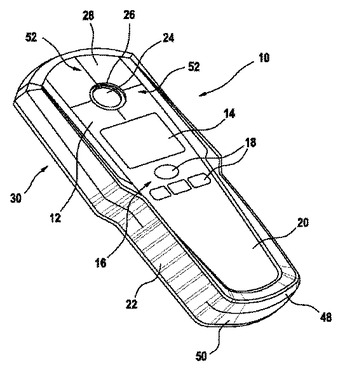 (もっと読む)
(もっと読む)
自走移動体の高精度位置決めのための位置検出方法とそのための機構
【課題】 高精度の位置決め制御をするのに、ユニット化されたデジタイザを最終位置出しセンサとして使用し、このデジタイザを最終位置出しセンサとして機能させることによって、少なくとも2つの位置決めセンサを用いることなく高精度の位置決めを可能にする位置検出方法、並びに、そのための機構を提供すること。
【解決手段】 台車11やリフトなどの停止位置センサ13を備えた移動体における固定系の位置決め点乃至その近傍にコイルとコンデンサを含み磁界の作用でエネルギを蓄える共振回路を備えた検知体を設置する一方、前記検知体に対面する移動体側に、当該検知体に対して規則的に配列した複数のループコイルを順次選択し磁界を発生させて前記共振回路にエネルギを蓄えさせると共に当該エネルギの作用を受けて前記ループコイルに発生する磁界を検出処理しその磁界の発生位置を位置データとして検出するセンサボード1を設けることにより、前記移動体の停止位置を、前記センサボード1が備えた検出精度により検出すること。
(もっと読む)
シート状部材のワイヤ角度算出方法及びその装置
【課題】 シート状部材を切断しながらワイヤの切断角度を正確に算出することのできるシート状部材のワイヤ角度算出方法及びその装置を提供する。
【解決手段】 シート状部材400のワイヤによる磁気の変化を検出装置120A,120Bによって検出し、検出した磁気が変化したときの検出装置120A,120Bの位置に基づいてシート状部材400の幅方向両端のワイヤの位置e1,e2をそれぞれ検出するとともに、シート状部材の幅方向両端のワイヤの検出位置間の距離LAを算出し、カッター230からワイヤの長手方向に所定距離だけ離れた位置の磁気を磁気抵抗検出器によって検出し、検出した磁気が変化したときのカッター230の位置に基づいてシート状部材400の幅方向両端のワイヤの位置e1,e2をそれぞれ検出するとともに、シート状部材400の幅方向両端のワイヤの検出位置間の距離LBを算出し、算出距離LAと算出距離LBに基づいて切断方向に対するワイヤの角度を算出する。
(もっと読む)
準直流磁界を用いた位置追跡
【課題】「準DC」磁界を用いて物体の位置および姿勢を追跡するための改善された方法およびシステムを提供する。
【解決手段】センサーの位置を追跡する方法であって、その方法は、センサーの近傍に周期的な磁界を生み出すことを含み、その磁界は、対応する正および負の一定の振幅を備えた正の極性の相および負の極性の相を有する。第1および第2の磁界測定信号が、正および負の極性の相の間の各々でセンサーでの磁界に応答して生み出される。センサーの位置は、第1および第2の磁界測定値信号に応答して求められる。
(もっと読む)
埋設電流搬送導体が所定の最小深さの上に埋設されているか否かを判定するための方法および装置
電流搬送導体を検出するための検出器(1)は、専用の信号送信機によって導体に誘導される主電源または電磁信号の一方または双方の結果として電流搬送導体によって生成される電磁放射を検出するために、垂直の間隔を置いた一対のアンテナ(3,5)を具備する。検出器(1)は、埋設導体の深さを継続的に計算し、埋設導体が所定の最小深さの上にある場合は、聴覚および/または視覚アラームをトリガする。アンテナ(3,5)の感度を低下させることによって、アラームが鳴る横方向へのオフセット範囲が縮小され、埋設導体の位置を判定することができる。 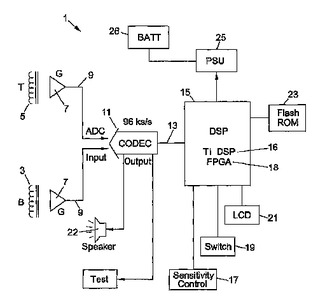 (もっと読む)
(もっと読む)
検出装置およびモータの軸受摩耗検出装置
【課題】回路構成を簡素化でき、検出コイルA,R1,R2,R3のインダクタンスの温度変化による影響を排除できるキャンドモータの軸受摩耗検出装置を提供する。
【解決手段】検出コイルA,R1,R2,R3に高周波信号を印加する。高周波信号を印加した検出コイルA,R1,R2,R3の出力信号から位相を検出する。検出した位相と検出コイルA,R1,R2,R3の出力信号とから、検出コイルA,R1,R2,R3のインダクタンスおよび抵抗値をそれぞれ検出する。検出したインダクタンスから、予め定められた温度変化によるインダクタンスと抵抗値との比例関係により検出された抵抗値から求められるインダクタンスの温度変化分を除き、温度補正したインダクタンスを求める。回路構成を簡素化し、検出コイルA,R1,R2,R3のインダクタンスの温度変化による影響を排除する。
(もっと読む)
異物検知方法及び異物検知装置
【課題】被検査物に含まれる金属異物をその向きによらないで検知できる異物検知装置を提供する。
【解決手段】センサーユニット11は、直列に接続された複数のセンサセル17から構成される。センサーユニット11に電圧を印加又は電流を供給することによりセンサセルから微少磁界を発生させて、微少磁界に応答した金属異物からの検知磁界をセンサーユニット11の検知電圧又は検知電流として検知して検知信号を出力する。この検知信号を解析して金属異物を検知する。微少磁界は、センサーユニット11に印加される電圧又は供給される電流が微少で、かつセンサセル17を構成するコアの磁界特性の非線形部分を利用したものである。センサセル17は、被検査物の搬送方向に対して45度傾くように配置され、細長い金属異物の検知感度を平坦化している。
(もっと読む)
6次の自由度の統合コイルAC磁気トラッカー
【課題】6次の自由度を有するトラッキング(追跡)を広く利用可能にする。
【解決手段】磁気トラッカーの市販品供給業者から得られた3軸磁場源コイルと3軸センサコイルが、駆動及び検知回路と一体化され、2つのモジュール内に完全な6次の自由度のトラッカーを与える。即ち、センサモジュールと磁場源モジュールにより、同一の設計の少なくとも第2のセンサを有し、追跡できる。基本的トラッカーモジュールの一方又は両方は、それぞれの印刷回路基板上に取り付けても良く、磁場源モジュールは、ハードウェアを減らすため、デジタル波発生と、同調コイルドライバとを利用しても良い。コイルの組の一方又は両方は、非同心でも良く、ホストコンピュータにP&Oアップデートを提供するための出力は、ホストコンピュータから電力を受取るUSB/USB2等のコネクタを利用しても良い。システムのコストを更に減らすため、センサコイルが受取った信号を増幅するのに使用する回路は、磁場源基板上のプロセッサの制御の下で複合化しても良い。
(もっと読む)
内視鏡形状検出装置
【課題】必要に応じたタイミングで内視鏡の挿入形状を表示する。
【解決手段】検出装置21は、液晶モニタ25におけるスコープモデルの表示をオン/オフする切替スイッチ40と、ソースコイル14iの各位置を算出する位置算出部113と、位置算出部113が算出したソースコイル14iの各位置に基づき、電子内視鏡6のスコープモデルを生成するスコープモデル生成部114と、表示休止時画像格納部115に格納されている表示休止時画像とスコープモデル生成部114からのスコープモデル画像を選択的に液晶モニタ25に出力するセレクタ116と、これら各部を制御する制御部117とを備えて構成される。
(もっと読む)
マルチスケール定位方法
キャプチャ範囲および精度と解像度を固定した定位システムを用いて位置測定がされることが多い。キャプチャ範囲を固定すると、精度と解像度が低くなることが多い。本発明によると、最初にキャプチャ範囲を大きくして、精度と解像度は低くしておく。この大きなキャプチャ範囲内でターゲットエリアを特定し標的とする。このように特定しておいて、キャプチャ範囲を反復的に狭くし、リージョンオブインタレストを中心にする。こうすることにより、精度と解像度を上げることができる。 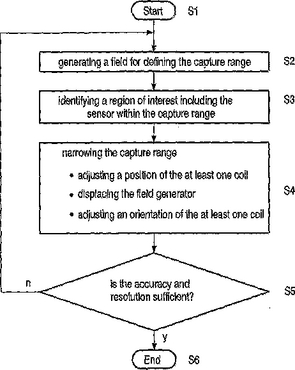 (もっと読む)
(もっと読む)
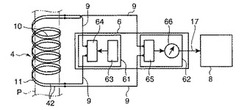
高圧流体を満たされる圧力空間から測定データを検出して伝送する装置
本発明は、高圧流体を満たされて均一な圧力を受ける圧力空間(11)を持つハウジング(10)から測定データを検出して、圧力空間(11)に設けられるセンサ(23)に接続されかつハウジング(10)から導出される導体条片(21)を介して伝送する装置であって、圧力空間(11)内に存在する力を両側に受けかつ少なくとも部分範囲(30)をハウジング(10)から導出される板(12)が、導体条片(21)の担体として圧力空間(11)内に設けられ、圧力空間(11)を包囲するハウジング(10)が、板(12)の面において分割され、両方のハウジング半体(13,14)が、端面でその間に板(12)を締付けて、圧力の作用で板(12)に生じる半径方向力がハウジング(10)により吸収されるようにしているものに関する。 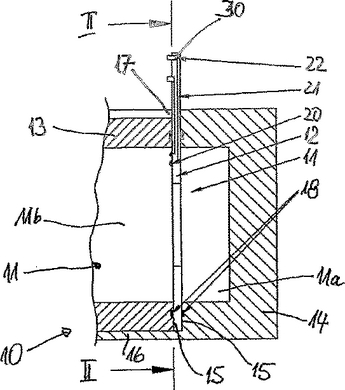 (もっと読む)
(もっと読む)
パッティングストローク解析装置および同用パター
ゴルフのパッティングストロークにおけるパターヘッドの動きを、連続的に、かつ、十分な精度を持って把握するために、X軸/Y軸方向にそれぞれ延びる複数の励起コイル兼位置検出アンテナを有する位置検出マット(3a、3b)上で、LC共振回路である電磁共鳴体(24a、24b)を付加したヘッド(21)を有するパター(2)を用いてストロークすることにより、電磁誘導作用により位置検出アンテナに発生する信号を検出し、パッティングストロークの解析をする装置、及び、それに用いるパターである。プレーヤー自らの技術の向上、あるいは、その指導、さらには、そのプレーヤーに最適なパターの選定に寄与する。  (もっと読む)
(もっと読む)
電子内視鏡システム
【課題】少なくとも体腔内に挿入された内視鏡先端部から突出自在な処置具の先端部と該内視鏡先端部との相対位置を検出することができる電子内視鏡システムを提供することを目的とする。
【解決手段】電子内視鏡システムは、先端部に撮像素子および第一の磁場発生器を有し、前記撮像素子により被検者の体腔内の画像を撮像する内視鏡と、先端部に磁場検出センサを有し、内視鏡の鉗子管路を介して内視鏡先端部から突出するように構成される処置具と、第一の磁場発生器から発生した磁場に基づき磁場検出センサで発生する誘導電流に基づいて、該第一の磁場発生器に対する処置具先端部の位置を検出する位置検出手段と、を有する構成にした。
(もっと読む)
内部欠陥測定方法および装置
【課題】構造体の内部欠陥の大きさと深さを定量的かつ高精度に測定・評価できる欠陥の大きさと深さ評価方法および装置を提供することにある。
【解決手段】腐食減肉部の検出および残肉厚を算出する処理手順は、(1)検出データの収集(S10)強磁性体でつくられた構造体の外面を走査させることによって、磁束検出コイルにて検出データの収集を行う(2)位相検波処理(S20)基準となる信号を乗算した後、フィルタリング処理を行う(3)座標変換(S30)先に求めたベクトル座標の座標変換すなわち座標軸の回転を行う(4)減肉部の検出(S40)(5)欠陥径の推定(S50)各ch間の減衰の仕方(傾き)から欠陥径の推定を行う(6)残肉厚の算出(S60)の順に行う。
(もっと読む)
位置センサおよび洗濯機
可動物体の位置を決定する位置センサ装置であって、位置センサ装置は、可動物体上に固定されるように構成された磁場ソースと、第1の位置に配置され、第1の位置における磁場ソースによって発生した磁場に対して、第1の磁場信号特性を検出するように適合された第1の磁場検出器と、第2の位置に配置され、第2の位置における磁場ソースによって発生する磁場に対して、第2の磁場信号特性を検出するように適合された第2の磁場検出器と、第1の磁場信号と第2の磁場信号との比較に基づいて磁場ソースの位置を決定するように適合されている位置決定ユニットとを備える、位置センサ装置。 (もっと読む)
121 - 140 / 160
[ Back to top ]