
Fターム[2F063GA01]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 磁気的手段を用いた検出器 (1,967) | 電磁誘導型、コイルによる検出 (846)
Fターム[2F063GA01]の下位に属するFターム
インダクタンスの変化を検出 (379)
差動変圧器型 (45)
シンクロ (2)
レゾルバ (87)
インダクトシン (2)
マグネシン
巻線の形状、構造 (68)
固定子巻線のないもの
固定子巻線に直流が流れるもの (2)
固定子巻線に交流が流れるもの (31)
移動子、回転子に巻線のないもの (11)
移動子、回転子の巻線に直流が流れるもの
移動子、回転子の巻線に交流が流れるもの (20)
コアの形状、構造 (31)
コア位置をずらしたもの
コア材料 (8)
Fターム[2F063GA01]に分類される特許
141 - 160 / 160
近距離場位置測定システムおよび方法
ヌル軸が垂直であり、かつ、水平面などの対象となる平面内にヌル軸が位置するように配置された、2つの磁気アンテナを利用することによって位置を特定するために、近距離場信号特性が使用される。2つのアンテナは、送信アンテナまたは受信アンテナとして使用されてもよい。アンテナを直交方式で駆動することによって、対象となる平面内で全方向性パターンの均等物を生成するように、アンテナは駆動されてもよい。直交駆動は、時間直交または位相直交であってもよい。位置は、伝搬特性を含んでもよい近距離場応答に基づいて特定され、伝搬特性は、振幅、位相、相対的な振幅、または位相、あるいはその他の特性を含んでもよい。一実施形態では、1つの受信機の位置を特定するために、複数の送信機が利用される。別の実施形態では、1つの送信機の位置を特定するために、複数の受信機が利用される。空間効率的な磁気アンテナが開示される。 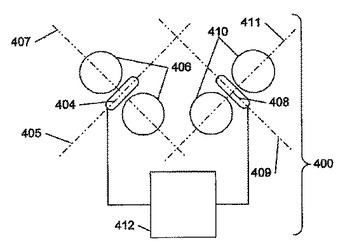 (もっと読む)
(もっと読む)
車両の車輪の、右側又は左側の位置を決定する方法、及び、位置決定装置

【課題】応答性の点で非常に効率的な右側/左側の位置決定プロシージャを提供すること。
【解決手段】車輪に装備した2つの磁気センサの最大感度軸は、車輪の回転軸に交差する面内で相互に所定の角度θだけオフセットされており、車両が所定の走行方向に移動する際に、磁場を変化することによって発生された、角度(+又は−)θに等しい角度値だけ相互に位相シフトされた2つの周期的な、車輪の1回転中磁気センサによって検出される磁場の値の変化を示す信号を、磁気センサの各々の端子で測定し、位相シフトから、車輪の回転方向を決定し、この回転方向及び車両の走行方向から、車輪の位置が、右側又は左側にあるのか推定する。
(もっと読む)
ベルトスリップ計測方法、ベルトスリップ計測装置、画像形成装置、プログラム、及び記録媒体

【課題】 上述した誤差要因を踏まえた上で、これらに影響されず、高精度なベルトスリップ計測装置ならびに計測方法を提供することにある。また、それらベルトスリップ計測装置を搭載もしくは外部要因によるベルトスリップ量の情報をもってベルト駆動速度の調整を行い、ベルトスリップに起因する画像劣化を低減した高品質画像を形成し得る画像形成装置を提供する。
【解決手段】 駆動または従動である2つ以上のローラ8で駆動されるベルト7と前記ローラ8との間で発生するスリップを計測するベルトスリップ計測装置において、前記ベルト7上及び前記ローラ8上に磁気パターン9a、9bを形成し、駆動状態で前記ローラ8上及び前記ベルト7上の磁気パターン9a、9bを検出する磁気ヘッドユニット10と、前記磁気ヘッドユニット10にて取得した磁気パターンからベルト7のスリップ量をPC11により算出するようにした。
(もっと読む)
磁気マッピング評価装置
【課題】 誤差分布データの解析を容易にするための評価機能を備えた磁気マッピング評価装置を提供する。
【解決手段】 磁界を発生する磁気ソース11と、磁気センサ12と、磁気センサを磁界中に定めた複数の測定点に対し順次移動させる磁気センサ移動機構13と、各測定点で磁気センサが測定した磁気データに基づいて位置誤差および角度誤差を算出する測定誤差算出部16と、算出された位置誤差や角度誤差に基づいて測定誤差分布を2次元的または3次元的に表示する磁気マッピング表示部17とを備え、算出した測定誤差をグラフィック表示する。
(もっと読む)
内視鏡挿入形状検出装置
【課題】磁界発生部に対して所定の位置関係にある磁界検出素子からの磁界信号を受信できるように、磁界検出素子の配置を選択することができる内視鏡挿入形状検出装置を提供する。
【解決手段】内視鏡挿入形状検出装置8は、内視鏡挿入形状検出装置8の一部として挿入形状検出用プローブ6に複数設けられたソースコイル21が発した磁界を検出するためのセンスコイル群23Aから23Iの複数のセンスコイル群が配置されたセンスコイルユニット23と、信号検出部33と、ソースコイル位置解析部35と、ソースコイル位置解析部35から出力される位置情報信号に基づき、ソースコイル21各々が発した磁界に基づく磁界信号の検出に用いる磁界検出素子を制御部センスコイル群23Aから23Iから選択する信号制御部37とを有する。
(もっと読む)
位置検出システムおよび装置ならびにその使用および制御のための方法
波形を発生する発振部分;発振部分を駆動する電源部分;およびエネルギーピックアップ回路であって、回路によって受信される励磁信号から電源部分にエネルギーを供給するエネルギーピックアップ回路を含む少なくとも1つのポインタ、および波形発生部分によって発生された波形から少なくとも1つのポインタの位置を検出するように作用するセンサを含む検出器を含む、位置検出システム。 (もっと読む)
導電線敷設位置検出装置
【課題】 容易に導電線の敷設位置を確認することができる導電線敷設位置検出装置を提供する。
【解決手段】 送信コイル10を誘導線20が敷設範囲内であることが明確な場所に、受信コイル11を誘導線20が敷設範囲外であることが明確な場所にレール8の外部表面に当接して設置する。次に、送信コイル10を固定したまま、受信コイル11を送信コイル10方向に逐次接近させる。そして、受信コイル11が誘導線20の敷設範囲内に侵入すると、送信コイル10で誘導線20に誘導され磁性鋼板21により増強された誘導電流により受信コイル11に誘導電流が誘起され、この誘導電流が誘導電流検出回路25により検知されて誘導線検出表示灯14と誘導線検出ブザー17が作動し、受信コイル11のレール8上の位置を、誘導線20の敷設範囲の端部と認識する。
(もっと読む)
地中位置計測方法及びシステム
【課題】複数の地中位置において同時に対地三次元座標を計測できる地中位置計測方法及びシステムを提供する。
【解決手段】地上又は地中の既知三次元座標の複数の基準位置Rから、自己相関が強く相互相関が弱い識別符号列Pで変調された周期性基準信号frを、所定搬送周波数fcの回転磁界3に乗せて地中2へ発信する。地中2の計測位置Qに三以上の受信コイル素子群21が所定相互関係で取り付けられた磁界計測装置20を所定姿勢Sで配置し、回転磁界3により各コイル素子21に誘起される信号fqを計測する。各コイル素子21の計測信号fqと各識別符号列Pとの相関に基づき計測位置Qにおける各基準信号frの位相τを検知し、各基準信号frの位相τのコイル素子相互間位相差Δτとコイル素子群21の所定相互関係及び姿勢Sとから、各基準位置Rの向きθRを検出する。各基準位置Rの既知三次元座標と向きθRとから、計測位置Qの対地三次元座標を算出する。
(もっと読む)
3次元情報検出システム及び3次元情報入力装置
【課題】 3次元情報検出システムにおいて簡単な構成で、表裏判定や鏡像判定を可能にすること。
【解決手段】 3次元情報検出装置109のセンサコイル110を切替部111によって順次選択すると共に、相互に干渉しないように直交配設された3次元情報入力装置101の各入力要素103〜105の入力コイル106〜108とセンサコイル110との間で電磁結合によって信号の送受信を行い、選択したセンサコイル110で受信した信号を検出部113で検出し、検出部113で検出した検出信号から、3次元空間における3次元情報入力装置101の位置や姿勢等の3次元情報を制御部210で算出する。
(もっと読む)
検針装置
【課題】異物の検出を行なう場合に、中空部内に存在する金属片の位置によって、検出感度に差異が生じることを防止するとともに、中空部外の外乱ノイズの影響を受けないように耐ノイズ性の向上を図った検針装置を提供すること。
【解決手段】被検査物を検査部1の中央に有する中空部2を通過させるように構成された検針装置100である。検査部1に配設してなる第1のコイル体10と、中空部2を挟んで第1のコイル体10と反対側に配設される直流磁界発生部20と、直流磁界発生部20に配設してなる第2のコイル体30と、を備えている。
(もっと読む)
回転飛翔体の回転角計測制御方法及び回転飛翔体
【課題】本発明は、回転飛翔する飛翔体内のコイルから地磁気を界磁として発生する電圧波形を用いて基準方位信号を得ることを目的とする。
【解決手段】本発明による回転飛翔体の回転角計測制御方法は、コイル(c)を設けた飛翔体(1)を発射し、中心軸を回転中心として回転する飛翔体(1)内のコイル(c)から地磁気(B)を界磁として発生する電圧波形(V)から飛翔体(1)の空間における回転角度である基準方位信号を得る方法である。
(もっと読む)
無端ベルト用エレメント検査方法及び検査装置
【課題】 検査の手間を省き、且つ、アセンブリを分解することなく、しかも、検査結果の再現性を高めるようにした無端ベルト用エレメント検査方法及び検査装置を提供する。
【解決手段】 ベルト式無段変速機に用いられる無端ベルト(1)の構成部品であるエレメント(3a)の検査装置(10)において、前記無端ベルトに周回運動を与える運動付与手段(13)と、周回運動中の前記無端ベルトのエレメントの積層周期を計測する計測手段(15、17)と、前記計測手段の計測結果を所定の基準周期と比較して前記エレメントの積層異常箇所を判定する判定手段(18)とを備えたことを特徴とする。
(もっと読む)
操作部材の位置を測定するためのセンサ
駆動接続部を介して電気モータによって動かされる、内燃機関の操作部材の位置を測定するためのセンサであって、前記操作部材のハウジング内に少なくとも1つの位置センサが配置されており、当該位置センサは前記駆動接続部での位置を検出し、少なくとも1つの位置センサが回路と接続されており、当該回路は動作電圧源を含み、前記少なくとも1つの位置センサから信号を受信する。前記回路と前記少なくとも1つの位置センサの間の接続を、電圧および信号を伝送する線路を介して行う。前記回路内に少なくとも1つの電流測定装置を動作電圧源に対して直列に接続する。前記少なくとも1つの位置センサの信号を介して、前記操作部材の位置に依存して、電流変化を前記線路を介して伝送する。  (もっと読む)
(もっと読む)
姿勢並びに関節角度検出装置及び方法
【課題】 地磁気や外部磁界の影響を受けないで発信出力を受信することができる。
【解決手段】 基準部位に取付けられ交番電流により交番磁束を発生させる送信コイル3と、動作部位に取付けられ上記交番磁束を検知する受信コイル4と、上記交番電流を発生させる発振器1の発振波形と上記交番磁束を検知する受信コイル4の受信波形との同期検波を行う同期検波回路6とを有する。また、送信コイル3に対し異なる動作部位に複数の受信コイル4を備え、この複数の受信コイル4を切り替えるマルチプレクサ10を備える。
(もっと読む)
被検出体の検出装置
【課題】本発明は、被検出体を検出する新規な装置を提供することを目的とし、特に非開削工法において地表面を大きく占有することなく掘削体の位置および姿勢をより精度よく検出可能な検出装置を提供することをその一つの目的としている。
【解決手段】本発明の一態様は、被検出体の位置及び/又は姿勢を検出する装置であって、前記被検出体に内蔵された磁界発生源と、前記磁界発生源が発生する磁界の直交する3方向成分を検出可能な一の検出手段と、前記検出手段で検出したデータに基づいて前記被検出体の位置及び/又は姿勢を演算する演算手段とを有する装置である。
(もっと読む)
パイプラインの欠陥位置特定方法並びにパイプラインのマーカー位置検出方法及び装置
【課題】 パイプラインの欠陥位置を高精度に特定することができるパイプラインの欠陥位置特定方法を提供する。
【解決手段】 パイプライン1の中を走行する検査ピグ3によりパイプラインの欠陥及びマーカー位置を検出し記録する方法において、特定周波数の交流磁場を発生する発信コイル21をパイプラインの外側にパイプラインに対して垂直に設置し、前記検査ピグにはパイプラインに平行になるように受信コイル31を設け、この受信コイルにより前記交流磁場を検出し、その検出した磁場信号のうち特定周波数の信号をバンドパスフィルタ33により取り出し、当該信号を包絡線検波して得られた波形をマーカー信号として欠陥信号との相対位置関係を対応づけて記憶し、このマーカー信号の波形中心位置を基準に欠陥位置までの距離を求める。
(もっと読む)
測定対象のオブジェクト厚さ及び電気伝導度を測定するための方法及びデバイス
本発明は、電磁誘導を使用して、導電性の測定対象のオブジェクトの寸法および/または電気的特性を、非接触式に測定するための方法に係る。この方法において、電磁場が、測定対象のオブジェクトを貫通するように発生される。本発明は、以下の方法ステップにより実現される;トランスミッタ・コイルを、測定対象のオブジェクトの一方のサイドに配置する;レシーバ・コイルを測定対象のオブジェクトのもう一方のサイドに配置する;磁場を、トランスミッタ・コイルの中に発生させる;トランスミッタ・コイルの中に発生させた磁場に、一つのレベルから他のレベルへの突然の変化を生じさせる;レシーバ・コイルの中に誘導される電圧を検出する;トランスミッタ・コイルの中での磁場が変化する時間T2から、レシーバ・コイルの中に電圧が誘導され始める時t1までに、経過した時間を決定する;誘導される電圧の強さを決定し、そして、測定対象のオブジェクトの厚さおよび/または電気伝導度を計算する。  (もっと読む)
(もっと読む)
厚さ及び電気伝導度の電磁気学的測定ための方法及びデバイス
本発明は、測定対象のオブジェクト(2)の、例えばその幾何学的寸法またはその電気伝導度などのような、被調査特性を、電磁誘導を使用して非接触式に決定するための方法に係る。この方法において、電磁場が、測定対象の前記オブジェクト(2)の一方のサイドに配置されたトランスミッタ・コイル(3)の中に発生され;測定対象の前記オブジェクト(2)を貫通する磁場が、測定対象の前記オブジェクト(2)のもう一方のサイドに配置されたレシーバ・コイル(4)により検出される。本発明は、下記工程を有している:コントロール・コイル(5)を、前記トランスミッタ・コイル(3)の近傍に配置する;前記トランスミッタ・コイル(3)の磁場の中に変化を発生させる;前記コントロール・コイル(5)の中の磁場の変化を検出する;前記レシーバ・コイル(4)の中の磁場を検出する;前記コントロール・コイル(5)の中と前記レシーバ・コイル(4)の中で、それぞれ磁場の変化が検出される時間の相違を決定する;測定対象の前記オブジェクト(2)を磁場が貫通する時間(T2)を決定する;その時間から、測定対象の前記オブジェクト(2)の厚さまたは電気伝導度を決定する。
 (もっと読む)
(もっと読む)
タイヤの異常検出方法および車輪転動の異常検出方法
【課題】汚れ等に影響されずに、タイヤに生じた異常を直接検出し、これを運転者に知らせるためのタイヤの異常検出方法を提供する。
【解決手段】磁性体3を、タイヤの環状部分2に周方向に沿って所定のピッチで配設するとともに、環状部分と交差する環状磁路を形成する磁石12を車体側に設け、タイヤの回転に伴い生起する環状磁路の磁束密度変化によって誘起される起電力を測定し、この測定波形から前記タイヤ環状部分の異常を検出する。
(もっと読む)
掘進管先端位置姿勢計測方法及び掘進管先端位置姿勢計測装置
【課題】地磁気が乱れていても、掘進管先端部の水平位置、深さ、傾斜角、回転角、及び方位角を精度よく測定する。
【解決手段】一辺が掘進計画線13と重なるように敷設された電流路22に交流電流を供給する電源21が接続されている。掘進管10先端部に3軸磁界検出器11及び3軸重力方向検出器12が設置されている。重力方向から掘進管先端部の傾斜角及び回転角を求める傾斜角・回転角検出部が設けられている。磁界の交流成分と電源からの同期信号から掘進管先端部の方位角を求める方位角検出部33が設けられている。磁界の交流成分から掘進管先端部の水平位置及び深さを求める水平位置・深さ計測部35が設けられている。
(もっと読む)
141 - 160 / 160
[ Back to top ]