
Fターム[2F063GA01]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 磁気的手段を用いた検出器 (1,967) | 電磁誘導型、コイルによる検出 (846)
Fターム[2F063GA01]の下位に属するFターム
インダクタンスの変化を検出 (379)
差動変圧器型 (45)
シンクロ (2)
レゾルバ (87)
インダクトシン (2)
マグネシン
巻線の形状、構造 (68)
固定子巻線のないもの
固定子巻線に直流が流れるもの (2)
固定子巻線に交流が流れるもの (31)
移動子、回転子に巻線のないもの (11)
移動子、回転子の巻線に直流が流れるもの
移動子、回転子の巻線に交流が流れるもの (20)
コアの形状、構造 (31)
コア位置をずらしたもの
コア材料 (8)
Fターム[2F063GA01]に分類される特許
1 - 20 / 160
コンベヤベルト装置
位置測定装置
【課題】操作の容易な高感度の位置測定装置を提供する。
【解決手段】第1の電気装置及び/又は第2の電気装置の電圧のそれぞれの比が予め定められた比に対し所定の基準よりも大きく異なっていると、物体が検出されたことを表す信号を形成するよう構成されている比較器と、第1の電気装置及び/又は第2の電気装置の電圧のそれぞれの比が予め定められた比に対し所定の基準よりも大きく異なっていると、物体を表す信号を出力する出力装置とが設けられている。
(もっと読む)
静止誘導電器の中身変位検出装置

【課題】静止誘導電器を地震後に解体せずにタンク内の電器中身の変位状況を精度良く推定でき、使用可能性を判定できる静止誘導電器の中身変位検出装置を提供する。
【解決手段】タンク1内に、鉄心と巻線16a、16b、16cからなる変圧器中身10とを収納し、絶縁媒体を充填する変圧器に適用する中身変位検出装置である。この装置は、タンク1の長手方向と幅方向の側壁内面1a、1b、1c,1dの巻線16a、16b、16cと最も近接し、かつ巻線上端部及び下端部に対向する位置に漏れ磁束測定センサー2とそれぞれ取り付け、タンク1の幅方向或いは長手方向の側壁内面の対応する関係にある対となる漏れ磁束測定センサー2の漏れ磁束測定信号を漏れ磁束検出手段3で検出し、この漏れ磁束検出手段3からの漏れ磁束測定信号を基にしてタンク1内に収納した変圧器中身10の変位状況を判定する演算ユニット9を備えている。
(もっと読む)
検出センサ
【課題】省スペース化を実現でき、かつ、小さい変化量を継続的に検出することが可能な検出センサを提供する。
【解決手段】検出センサは、絶縁体、第1の導電部及び第2の導電部を具備する。絶縁体は、対象物に取り付けられる変形可能なものであり、第1の導電部は、前記絶縁体上に配置される導線から成り、電流が供給されることで磁界を発生させる磁界発生部を備える。第2の導電部は、前記絶縁体上の前記第1の導電部と同面に配置される導線から成り、前記磁界発生部で発生された磁界のうち少なくとも一部を受け取り前記受け取った磁界の磁束密度に応じた電流を発生させる電流発生部を備え、発生した電流を伝送する。
(もっと読む)
位置検出センサ、これを備えたクラッチアクチュエータ、およびこれを備えたクラッチ装置
【課題】被位置検出部材の直線移動が大きい場合にも磁界発生部材による位置検出をより正確に検出しつつ、コストを安くすることのできる位置検出センサを提供する。
【解決手段】位置検出センサ1の磁界発生部材3は、被位置検出部材2の直線移動方向の長さが所定長さで磁石により磁化される例えば鉄等の軟磁性体3aと、同じ大きさの一対の磁石3b,3cとを有する。一対の磁石3b,3cは、それぞれ、軟磁性体3aの両端に被位置検出部材2の直線移動方向に直線状に接合されている。すなわち、磁石3b,3c
と軟磁性体3aは被位置検出部材2の直線移動方向に交互に配設される。これにより、被位置検出部材2の直線移動方向の磁界発生部材3の長さLは、従来の磁界発生部材3の長さより長く設定される。
(もっと読む)
磁場を利用した端末の位置測定方法及び装置並びにコンピュータ読み取り可能な記録媒体
【課題】追加的なインフラの設置なしに端末の位置及び移動方向を測定することができる磁場を利用した端末の位置測定方法及び装置並びにコンピュータ読み取り可能な記録媒体を提供する。
【解決手段】本発明の磁場を利用した端末の位置測定方法は、端末が位置する領域の磁場マップを受信するステップと、端末に含まれて第1情報及び第2情報を各々検出する第1センサ及び第2センサの各々から検出された値を受信するステップと、磁場マップ、第1センサによって検出された第1情報、及び第2センサによって検出された第2情報に基づいて端末の位置を測定するステップと、を有する。
(もっと読む)
歪み相殺を備えた磁界発生器パッチ
【課題】磁界発生器を提供する。
【解決手段】磁界発生器は、基材、主発生器コイル、少なくとも1つの磁界センサ、少なくとも1つのシムコイル、ドライバー回路及び補正回路を含む。主発生器コイル、磁界センサ、及びシムコイルは、全て基材上に配置されている。ドライバー回路は、選択された周波数にて駆動電流を使用して主発生器コイルを駆動するよう連結されている。補正回路は、少なくとも1つの磁界センサから選択された周波数にて信号を受信し、定義済みベースラインからの信号における偏位に応答して、ベースラインに信号を戻すよう構成された振幅を有する駆動電流を使用して、少なくとも1つのシムコイルを駆動するよう連結されている。
(もっと読む)
位置検出装置
【課題】回路構成の簡素化に寄与することができる位置検出装置を提供する。
【解決手段】直列に接続される第1〜第4の二次コイル15a〜15dは、基板に直交する特定の軸回りに90°間隔で設けた。そして、これら二次コイル15a〜15dに対して、時間的な位相を互いに90°ずらして励磁するようにした。また、各二次コイル15a〜15dに発生するアナログ電圧の和である合成信号を、単一のA/D変換器21で取り込むようにした。A/D変換器21の取り込みタイミングとして、特定の二次コイルに発生する電圧が最大になる第1のタイミング、および、第1のタイミングにおける前記電圧の位相が時間的に90°ずれる第2のタイミングをそれぞれ設定した。第1および第2のタイミングでA/D変換器に取り込まれる合成信号のデジタル値の組み合わせに基づき、検出対象の位置を求めるようにした。
(もっと読む)
角度検出装置、操舵装置、作業車両、および角度検出方法
【課題】角検出精度を向上させることができる角度検出装置および角度検出方法の提供。
【解決手段】互いに位相差を有するsin信号およびcos信号を出力する角度センサと、sin、cos信号の信号変化率に基づいて、sin、cos信号の一方を選択して角度検出に用いる制御部と、を備え、制御部は、第1、第2信号の一方の信号変化率(電圧勾配)が他方の信号変化率(電圧勾配)よりも小さくなる場合に、選択される信号を前記一方から前記他方へと切り替える。このように2つの信号を選択的に用いることで、変曲点に近く分解能が悪い領域の信号値が角度検出に用いられることが回避されるので、角検出精度を向上させることができる。信号変化率の大小は、sin、cos信号の電圧に基づいて判断することができる。
(もっと読む)
地中障害物磁気探査方法
【課題】シールド掘進機による掘削前に、該シールド掘進機の進路における地中障害物の有無を、構造簡単且つ低コストで探査する。
【解決手段】検知可能半径rの磁気センサーを用い、シールド掘進機のシールド筒体内から、該シールド掘進機の進行方向の地盤に長尺な棒を挿入可能な探査孔を2以上の複数箇所に形成し、且つ、前記複数の探査孔を、それぞれ少なくとも1つの他の探査孔との距離Rが、r<R<2rを満たすように形成し、1つの前記探査孔に、先端に前記磁気センサーを取り付けた長尺な探査棒を挿入して行う先の磁気探査工程と、前記先の磁気探査工程の後に、前記探査棒を、先の磁気探査工程を行った探査孔から距離Rの位置の地盤に形成された他の探査孔に挿入して行う後の磁気探査工程とを行い、前記先の磁気探査工程と後の磁気探査工程の結果から、前記地中障害物の位置を判断する位置検知工程を有する地中障害物磁気探査方法。
(もっと読む)
回転検出装置
【課題】回転検出装置の組立作業性を向上させることにある。
【解決手段】外周側にコイルが巻装される略円筒形状のボビン21と、ボビン21の軸心に嵌入される鉄心コア23と、鉄心コア23を磁化させるマグネットとを有するパルサ13であって、ボビン21の端部21aには一対のターミナル28a,28bがインサートモールドされている。一対のターミナル28a,28bは、コイル接続部30と、リード線接続部31と、コイル接続部30とリード線接続部31とを連結する連結部29とを備えている。コイル接続部30にはコイルの両端に設けられた撚り線部33a,33bが電気的に接続され、リード線接続部31にはリード線の一端が電気的に接続されており、これらコイル接続部30とリード線接続部31とが平面状に形成されている。
(もっと読む)
回転検出装置
【課題】コイルやリード線の断線を防止することにある。
【解決手段】外周側にコイルが巻装される略円筒形状のボビン21と、ボビン21の軸心に嵌入される鉄心コア23と、鉄心コア23を磁化させるマグネットとを有するパルサ13であって、ボビン21の端部21aには一対のターミナル28a,28bがインサートモールドされている。一対のターミナル28a,28bは、導電材料によりボビン21の端部21aの断面形状に沿う略円弧状に形成されている。この一対のターミナル28a,28bには、コイルの両端に設けられた撚り線部33a,33bと、エンジン制御装置に一端が接続された一対のリード線の他端とがそれぞれ電気的に接続されている。
(もっと読む)
鋼帯コイルの端部位置の検出方法
【課題】簡単な構成で作業性よく、しかも確実に、鋼帯コイルの払出し側端部を検出可能な鋼帯コイルの端部位置の検出方法を提供する。
【解決手段】コイル搬送手段10により搬送されペイオフリール11のマンドレル12に装着された鋼帯コイル13の払出し側端部14を検知して、ペイオフリール11の上位置に配置されたマグネットコンベアに吸着させる鋼帯コイルの端部位置の検出方法であり、マンドレル12に装着された鋼帯コイル13を払出し方向とは逆方向に回転させながら、巻回状態の鋼帯コイル13から剥がれた払出し側端部14を、コイル搬送手段10に設けられ鋼帯コイル13とは隙間を有して配置された在荷検出用センサー16により検知させ、検知状態が未検知状態となった角度位置を基準として、鋼帯コイル13を予め設定した角度回転させ、鋼帯コイル13の払出し側端部14をマグネットコンベアに吸着させる。
(もっと読む)
埋設ケーブルまでの距離を推定する推定方法、及び試掘方法
【課題】埋設ケーブルまでの距離を簡単かつ正確に推定する。
【解決手段】埋設ケーブルまでの距離を推定する推定方法であって、埋設ケーブル上方の第一地点と、前記第一地点から距離Δ離れた第二地点の2地点で磁束密度Bをそれぞれ測定し、測定した2地点の磁束密度Bの比を計算することによって前記第一地点における磁束密度Bの変化率Wを算出し、算出した磁束密度Bの変化率Wに基づいて前記第一地点から埋設ケーブルまでの距離Lを推定する。
(もっと読む)
電磁誘導型埋設物探査装置の発信器
【課題】従来の電磁誘導型埋設物探査装置の発信器では、地下埋設物に同相の探査信号が誘起されるため、複数の埋設物が存在する場合であっても単一の埋設物として観測される可能性がある。
【解決手段】設置方向の変更またはコイルの切替によって、図2および図5に示すような方向の磁力線を送出できる発信器を実現する。これによって従来の探査機能の他に、同程度の深さに複数の埋設物がある場合に、隣接する2つの埋設物に逆相の探査信号を誘起することにより複数か単一かの識別が可能となる。
(もっと読む)
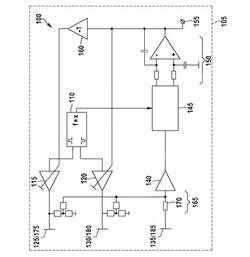
回転検出装置
【課題】磁気センサでは困難な、高速な回転の検出に好適な回転検出装置を提供する。また同時に、耐環境性に優れ、低コストな装置とする。
【解決手段】本発明の回転検出装置は、ターゲット1との対向距離に反応するインダクタンス(又はキャパシタンスも可)を含む回路の共振周波数に基づく周波数の第1信号を発生する第1信号発生器9、及び、基準となる周波数の第2信号を発生する第2信号発生器10を具備し、第1信号発生器9には電圧制御発振器2が含まれている。位相同期回路12は、第1信号及び第2信号について、位相及び周波数が相互に一致するように、電圧制御発振器2に制御電圧を付与する。出力回路8は、制御電圧が変化している時期を捉えた矩形波信号、すなわち、ターゲットの凹部又は凸部に対応した信号を出力する。
(もっと読む)
エンジン制御装置
【課題】エンジン出力軸の回転位相のソフトウェアによる検出とハードウェアによる検出との切り替えを適切に行うことができるエンジン制御装置を提供する。
【解決手段】この装置は、欠歯部位を有する10°CA間隔のパルス信号(NE10信号)を入力してTDC信号を出力する信号処理回路を備える。NE10信号に基づくエンジン出力軸の回転位相の検出を、エンジン回転速度NEが高い運転領域では信号処理回路(ハードウェア)による検出を通じて行う一方、エンジン回転速度NEが低い運転領域ではマイクロコンピュータによる演算処理(ソフトウェア)による検出を通じて行う。ハードウェアによる検出からソフトウェアによる検出への切り替えを、エンジン回転速度NEが予め定められた所定速度Vを下回った後に(S202:YES)、エンジン出力軸の回転位相が予め定められた所定位相になるタイミング(S203:YES)で行う。
(もっと読む)
超音波探傷システムおよび超音波探傷方法
【課題】検査対象の所定範囲を効率よく網羅的に検査する。
【解決手段】検査対象Aの表面上において移動させられて検査対象A内部の超音波探傷を行う超音波探触子2と、該超音波探触子2の位置および姿勢を検出する位置姿勢検出装置3と、検査対象Aの表面上における超音波探触子2の移動経路Cを記憶する経路記憶部と、経路記憶部に記憶されている移動経路Cに対する超音波探触子2の位置および姿勢のズレ量の許容値を記憶する許容値記憶部と、位置姿勢検出装置3により検出された超音波探触子2の位置および姿勢の移動経路Cに対するズレ量が許容値記憶部に記憶されている許容値を超えた場合にその旨を報知する報知部6とを備える超音波探傷システム1を提供する。
(もっと読む)
測定したい大面積表面上の薄膜層の厚さを測定する方法およびデバイス
【課題】大面積の測定したい表面の薄膜層の厚さを測定する方法およびデバイスを提供すること。
【解決手段】本発明は、大面積の測定される表面(12)の薄膜層の厚さを測定する方法およびデバイスに関し、少なくとも1つのセンサ要素(29)、およびセンサ要素(29)に関連付けられた少なくとも1つの接触球状キャップ(31)を備えた少なくとも1つの測定プローブ(28)は、測定値を得るために測定される表面(12)に宛てがわれ、大面積の測定される表面(12)は、個別の部分領域(14)に分割され、測定点(16)の行列は検査される各部分領域(14)に対して決定され、少なくとも1つの測定プローブ(28)を担持するデバイス(21)を使用して、部分領域(14)の行列の少なくとも1つの行(17)に沿って、等距離測定点(16)で測定値が探知され、測定値は、前部分領域(14)内の前記行列の全ての行(17)に対して連続的に探知され、この部分領域(14)に対して評価される。
(もっと読む)
測定プローブ
【課題】 物体上の複数のコーティングを簡単および確実な方法で非破壊で検査できる測定プローブを提供すること。
【解決手段】 物体(16)の測定表面(17)への接触のための少なくとも1つのセンサ要素を備えた測定ヘッド(26)と、ハウジング(22)によって少なくとも部分的に囲まれる測定ヘッド(26)を受ける支持デバイス(24)とを備えた、物体(16)上の薄膜層の厚さの非破壊測定用測定プローブであって、基本の測定ヘッド(26)に隣接し、それから分離した少なくとも1つの付加の測定ヘッド(27)が、支持デバイス(24)に配置され、且つ、基本の測定ヘッド(26)とは独立して制御され得るよう構成されている。
(もっと読む)
1 - 20 / 160
[ Back to top ]