
Fターム[2F063GA03]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 磁気的手段を用いた検出器 (1,967) | 電磁誘導型、コイルによる検出 (846) | インダクタンスの変化を検出 (379)
Fターム[2F063GA03]の下位に属するFターム
ソレノイド中にコアを挿入 (21)
空隙変化型 (50)
渦電流センサ (185)
Fターム[2F063GA03]に分類される特許
61 - 80 / 123
変位センサ
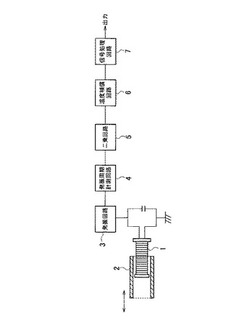
【課題】変位体の変位に対する出力信号の直線性を向上させる。
【解決手段】発振回路3が、変位検出用コイル1のインダクタンス(L)に対応した周波数を有する発振信号を出力する。発振周期計測回路4が、発振回路3から出力された発振信号の周期を計測し、計測された周期に対応する信号を出力する。二乗回路5が、発振周期計測回路4から出力された信号の二乗値を演算出力する。発振信号の周期の二乗値を演算出力することにより、インダクタンス(L)成分と容量(C)成分の平方根成分がなくなり、出力信号は変位体の変位に対し直線的な関係で変化する信号となる。
(もっと読む)
研磨終了時点の予測・検出方法とその装置

【課題】渦電流によるジュール熱損を極小に抑えるとともに、研磨終了時点を精度よく予測・検出し、また除去すべき残膜量及び研磨レート等をその場で精度よく算出して、所定の導電性膜が適正に除去されているかを正確に評価しうる研磨終了時点の予測・検出方法とその装置並びにリアルタイム膜厚モニタ方法とその装置を提供することを目的とする。
【解決手段】本発明は上記目的を達成するために、所定の導電性膜28に高周波インダクタ型センサにおけるインダクタ36を近接させ、該インダクタ36で形成される磁束により所定の導電性膜28に誘起される磁束変化をモニタし、研磨中の膜厚が所定の導電性膜28の材質を一因子として決まる表皮深さに対応する膜厚になった場合の磁束変化を基に膜厚基準点を検出し、該膜厚基準点から研磨終了時点を予測し、またその場で研磨レート及び除去すべき残りの膜厚量を算出する方法を提供するものである。
(もっと読む)
ブレーキ装置
【課題】ブレーキコイルが発生する磁束の影響を受けず、可動鉄心が静止している状態においても、可動鉄心の位置を検出することのできるブレーキ装置を提供する。
【解決手段】固定鉄心2と、固定鉄心2の周囲に巻回されたブレーキコイル5と、ブレーキコイル5が発生する磁束によって固定鉄心2に吸引される可動鉄心3とを備えたブレーキ装置において、固定鉄心2と可動鉄心3との間の距離を自己インダクタンスの変化として検出する検出コイル6を固定鉄心2に備え、検出コイル6は二重環形式で2つのコイルは互いに逆方向に巻回されて直列に接続され、かつ、巻数と面積がブレーキコイル5が発生する磁束との鎖交数が略零になるように構成されているものである。
(もっと読む)
ポジションセンサ
【課題】検出精度の悪化を抑制しながらも可動部の移動阻害を抑制できるポジションセンサを提供することにある。
【解決手段】ポジションセンサは、固定部1と、当該固定部1に所定の移動方向に移動自在に取り付けられた可動部2と、固定部1に設けられ可動部2と固定部1の緩衝用の流体9が内部に充填される流体収容部14とを備えるシリンダ装置の流体収容部14内に配置されており、固定部1に固定され上記移動方向に中心軸を沿わせた形の検出コイル50を有する検出部5と、可動部2に固定され可動部2の移動により検出部5に対して上記移動方向に相対変位する被検出部7とを備え、検出部5は、被検出部7の内側を上記移動方向に移動自在に挿通する形に配置され、検出部5には、流体収容部14内に充填される流体9用の流路部8が形成されてなる。
(もっと読む)
レール高さ検出方法、レール高さ検出機構およびレール高さ変位量測定装置
【課題】
差動コイルを用いた電磁式の検出器を利用して検出器からのレール高さを特性グラフを参照して処理をすることで測定するレール高さ検出方法およびレール高さ検出機構を提供することにある。
【解決手段】
この発明は、隣接して配置され相互に逆方向に巻かれた第1、第2の空芯コイルを有しレールの頭部の上部に対応させて軌道検測車に設けられた電磁センサから第1、第2の空芯コイルのそれぞれの検出信号を得て第1、第2の空芯コイルの検出信号の和信号と差信号との比に基づいて電磁センサのレールに対する走行方向に直交する方向のずれ量を得て第1、第2の空芯コイルの検出信号の和信号と電磁センサのレールに対する高さとの関係を示す特性グラフを参照してずれ量に対応する特性グラフに基づいて電磁センサのレールに対する高さを得るものである。
(もっと読む)
カテーテル追跡システム
【課題】較正を簡略化し、かつ測定精度の向上を可能とするカテーテル追跡システムを提供する。
【解決手段】人または動物の身体1の部分内でカテーテル頭部16の位置を位置決めおよび追跡するための、図1、図2および図3に示したようなカテーテル追跡システム。このカテーテル追跡システムは、人または動物の身体を介して所望の位置に導かれるように構成された頭部16を有するカテーテル10と、複数の磁界変換器であって、そのうちの少なくとも1つがカテーテル18上に配置され、他のものが身体内部および/または周囲に配置されると共に基準変換器19として機能する複数の変換器と、複数の磁界変換器を付勢する制御ユニットとを備える。磁界信号を処理する際、基準変換器19に対してカテーテル頭部16の位置を決定する。
(もっと読む)
可動部材の検出装置
【課題】コンパクトで、しかも回転角度および直線的な移動量、もしくはそれらの動作速度を共に検出することのできる検出装置を提供する。
【解決手段】回転および直線的に移動する可動部材の回転角度と直線移動量もしくは回転角速度と直線移動速度とを検出する検出装置において、前記可動部材30が前記直線移動することに伴って前記可動部材30と共に直線移動する第1可動部45と、前記第1可動部45を回転自在に保持し、かつ前記可動部材30が回転することに伴って前記可動部材30と共に回転する第2可動部34と、前記第1可動部45が直線移動することによってその直線移動に応じた信号を出力する第1センサ47と、前記第2可動部34が回転することによってその回転に応じた信号を出力する第2センサ39とを備えている。
(もっと読む)
シャフトの回転角度をインクリメンタルに求める方法
シャフト、殊に内燃機関のクランクシャフトの回転角度をインクリメンタルに求める方法であって、前記シャフトは、歯(3)と歯の欠損部(4)を具備したセンサホイール(1)と接続されており、当該センサホイール(1)には少なくとも1つのセンサ(6)が割り当てられており、当該センサ(6)は第1の値または第2の値をとる矩形信号を出力信号として生成し、1つの信号エッジは1つの歯のエッジに割り当てられており、前記エッジに対して相対的な対向エッジの時間的な位置は回転方向を符号化し、前記エッジに対して相対的な前記対向エッジの時間的な位置によって、センサホイール(1)の歯(3)に対する回転方向反転点(UKP)の対応付け、またはセンサホイール(1)の歯の欠損部(4)が符号化され、回転角度が各信号エッジ毎に増分(Ink)をカウンターに加えることによって求められ、歯(3)がセンサ(6)を通過している間の回転方向反転後には、一度、回転方向反転後の回転方向の符号を有する半分の増分がインクリメントされ、歯の欠損部がセンサを通過いている間の回転方向反転時には一度、回転方向反転前の回転方向の符号を有する半分の増分がインクリメントされる。 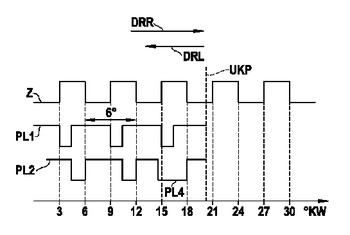 (もっと読む)
(もっと読む)
磁束センサおよび磁束センサを備えた平面ステージ
【課題】サーフェスモータステージ装置等を使った平面ステージにおいて、移動体の移動距離を測定するために、軽量安価でかつ構造が簡単な磁束センサを備えた平面ステージを提供すること。
【解決手段】磁性体からなる凸極が等間隔で形成されたプラテン8と、プラテン8上に浮上して移動する移動体2と、移動体2を制御する制御部9とを備えた平面ステージ1において、移動体2に、磁性体からなり、プラテン8の凸極のピッチの整数倍のピッチを有し、かつ前記凸極の幅と同じ幅を有する複数の凸部を有する櫛歯状部が形成された磁性体本体と、前記櫛歯状部に磁束を発生させる磁束発生手段と、前記櫛歯状部の磁束の変化を測定し、その結果を出力する磁束測定手段とを備え、前記櫛歯状部の凸部をプラテン8に対向するように配置した磁束センサ7を設け、制御部9は、前記磁束測定手段で測定された出力に基づいて、移動体2の移動距離を算出することを特徴とする平面ステージである。
(もっと読む)
位置検知装置
【目的】複数位置を検出でき、設置場所の自由度が高い位置検知装置を提供する。
【構成】信号線Q1〜Q4は、複数の検知位置A〜Gごとに電磁結合位置にあるか否かの組合せが異なる配線パターンで形成される。検知線S1は検知部10に接続される。センサーユニット9は検知コイルC1,C2と、これに接続された信号搬送コイルCTを有する。信号線を駆動部2で交流駆動し、ユニット9を信号線上に配置すると、検知コイルC1,C2は検知位置に応じた信号線の組合せで交流信号をひろい、信号搬送コイルを介して検知線を交流駆動し、検知部はその波形からセンサーユニットが配置された検知位置を検出する。
(もっと読む)
回転角度検出装置
【課題】回転角度検出装置の部品点数を削減できると共に、検出回路の出力信号の誤差要因が少なくなるため、ロジック回路や増幅回路を簡略化でき、回転角度検出装置のコストダウンを達成する。
【解決手段】コイル及び抵抗体からなる検出素子部を含む検出回路と、コイルのインダクタンスを被測定回転体の回転に応じて変化させるインダクタンス変化手段とを有する角度検出手段を備え、さらに検出回路に出力信号を発生させるための基準パルス電圧発生手段と、検出回路の出力信号を演算する演算手段とを備えている回転角度検出装置であって、演算手段は、基準パルス電圧発生手段で発生した基準パルス電圧を前記検出回路に入力した際に生じる過渡現象的出力電圧を所定時間積分して積分値を求め、該積分値に基づいて前記被測定回転体の回転角度を検出する。
(もっと読む)
位置検出システム、医療装置誘導システムおよび位置検出方法
【課題】外部からの電力供給により交番磁界を発生する一のマーカと、該交番磁界の周波数と同一またはその近傍に共振周波数を有する共振回路を備えた他のマーカとが共に存在した場合であっても、一のマーカの位置または方向を正確に検出する。
【解決手段】外部からの電力供給により第1の位置算出用周波数を有する第1の交番磁界を発生する第1のマーカ4と、位置算出用周波数と同一の共振周波数を有する磁気誘導コイル5を搭載した第2のマーカ3と、該第2のマーカ3の作動範囲の外部に配置され、第1の位置算出用周波数において磁界を検出する磁界検出部13と、検出された磁界から、第1の位置算出用周波数を有するとともに第1の交番磁界と同一の位相を有する第1の検出磁界成分を抽出する抽出部24と、抽出された第1の検出磁界成分の強度に基づいて第1のマーカ4の位置および方向の少なくとも一方を算出する位置方向解析部22とを備える位置検出システム1を提供する。
(もっと読む)
誘導式の位置測定装置または角度測定装置
【課題】本発明の課題は、大きな温度領域で使用でき、機械的な公差と測定オブジェクトの摩耗とに対して耐性を有し、特性曲線が線形である可能な限り大きな位置測定領域または角度測定領域を有する省スペースの位置測定装置または角度測定装置を提供することである。
【解決手段】可動の測定エレメントによるオーバーラップの程度に依存して生成されるインダクタンスの変化に起因してパルス周波数を変化する測定コイルを含む測定発振器である第1の発振器と、測定コイルまたは基準コイルを含む測定発振器または基準発振器である第2の発振器とを有し、基準コイルは、該可動の測定エレメントによって完全にオーバーラップされるかまたは完全にカバーされないことにより定義され、該測定発振器および基準発振器のパルス周波数はデジタルの評価回路においてカウントされる構成。
(もっと読む)
車輪用転がり軸受装置
【課題】温度ドリフトの発生を防止して、センサの信頼性をさらに高めることができる車輪用転がり軸受装置を提供する。
【解決手段】車体側に固定される筒状の固定軌道輪1と、この固定軌道輪1の内部に回転自在に挿通される回転軌道輪2、3と、これらの軌道輪の間に転動自在に配設される複列の転動体5とを備えた車輪用転がり軸受装置H。前記回転軌道輪2、3の車両インナ側端部の外周面とのギャップを検出する複数の変位センサ24を周方向に有する円環状のセンサハウジング16の車両アウタ側端部が、前記固定軌道輪1の車両インナ側端部内周面に圧入されており、且つ前記変位センサ24が合成樹脂又はゴム系材料で被覆されて前記センサハウジング16と一体化されている。
(もっと読む)
変速機シフト位置の検出装置
本発明は、シフト装置の変速機シフト位置を検出するセンサ(5,6,7)、及びセンサ(5,6,7)の評価信号を変速機操作器の電子制御装置へ伝送するためのインタフェース(2)を持つ機関変速機の変速機操作器に接続する装置に関し、センサ(5,6,7)とインタフェースとの間隔がインタフェース(2)と検出すべきシフト装置との間隔より小さいように、これらのセンサが設けられている。 (もっと読む)
検知体位置検出システム
【課題】 検知体を検出空間内に導入した後に、検知体を取り除くことなく、キャリブレーションを行うことができる検知体位置検出システムを提供する。
【解決手段】 位置検出用磁界を発生する磁界発生部3と、共振磁界を発生する共振回路21と共振回路21の経路を接続または切断する外部信号型スイッチとを有する検知体5と、外部信号型スイッチの接続または切断を制御するスイッチ制御部7と、位置検出用磁界および共振磁界の少なくとも一方の磁界強度を検出する位置検出用磁界検出部9と、位置検出用磁界検出部9の検出信号に基づき、検知体5の位置および向きを算出する位置算出部11と、が設けられたことを特徴とする。
(もっと読む)
周波数外挿を利用した歪みのない位置追跡方法およびシステム
【課題】少なくとも一つの磁界発生器を使って、物体の近傍に二つあるいはそれ以上の周波数で交流(AC)磁界を発生することを含む、物体の位置追跡の方法を提供する。
【解決手段】AC磁界を物体と関連付けたフィールドセンサーを使って検出する。検出されたAC磁界の少なくとも一部分が歪みを受けている、フィールドセンサーでのAC磁界の振幅および方向を示す対応ACデータポイントを生成する。AC磁界の振幅および方向をひずみの低減したレベルの状態で求めるために、ACデータポイントのAC磁界の複数の周波数への依存を単一の標的周波数への依存に外挿する。少なくともひとつの磁界発生器に対する物体の位置座標を、外挿されたデータポイントに応じて計算する。
(もっと読む)
転動装置部品の検査方法および検査装置
【課題】転動装置部品の表層部に形成された浸炭層、浸炭窒化層等の表面硬化層の深さを精度よく検出することのできる転動装置部品の検査方法を提供する。
【解決手段】転動装置部品の表層部に形成された表面硬化層の深さを測定する手段として電磁誘導センサ11を用い、電磁誘導センサ11の誘導コイル11bに発生した誘導起電力に基づいて表面硬化層の深さを測定するようにした。
(もっと読む)
有機材料から成る粘弾性体の変形量計測方法とその装置及びタイヤ変形量計測装置
【課題】計測する粘弾性体の変形量が大きい場合でも、その変形量を精度よく計測できるとともに、耐久性に優れた有機材料から成る粘弾性体の変形量計測装置を提供する。
【解決手段】有機材料から成る粘弾性体から成るタイヤ20のトレッドゴムの変形量を計測するためのコイル11を、タイヤトレッド21の陸部21kを構成するゴム内に埋設するとともに、上記コイル11に抵抗12を直列接続し、このコイル11と抵抗12とから成る回路に交流電圧を印加して上記抵抗12の両端の電圧Vを検出し、この検出された電圧Vと予め求めておいたトレッドゴムの変形量εと抵抗12の両端の電圧Vとの関係を示すε−V対応表16Tとに基づいて、上記コイル11が埋設されているタイヤトレッド21の陸部21kのゴムの変形量を計測するようにした。
(もっと読む)
内燃機関のクランク角度検出装置
【課題】回転方向の誤判定を防止し、クランク角度の基準位置を容易に検出できると共に、停止時もしくは始動時の気筒及びクランク角度の検出を可能とする。
【解決手段】一部に欠け歯部を形成する等間隔に配設された被検出部を有するクランク角検出用信号板121と、被検出部が通過する毎にそれぞれ第1クランク角信号と第2クランク角信号を発生する第1信号発生手段122と第2信号発生手段123、第1クランク角信号及び第2クランク角信号の状態からクランク軸の回転方向を判定する回転方向判定手段と、欠け歯領域が第1信号発生手段もしくは第2信号発生手段を通過しているかどうかを判定する欠け歯通過判定手段とを備え、回転方向判定手段は、欠け歯通過判定手段の判定結果に応じて、クランク軸の回転方向の判定方法を変えるようにしたもの。
(もっと読む)
61 - 80 / 123
[ Back to top ]