
Fターム[2F063GA05]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 磁気的手段を用いた検出器 (1,967) | 電磁誘導型、コイルによる検出 (846) | インダクタンスの変化を検出 (379) | 空隙変化型 (50)
Fターム[2F063GA05]の下位に属するFターム
Fターム[2F063GA05]に分類される特許
1 - 20 / 23
摩耗検知装置、摩耗ゲージおよび摩耗検知方法
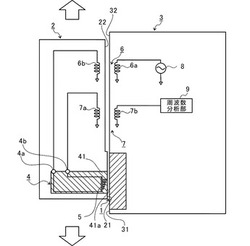
【課題】相対移動する摩耗側部品と対向側部品を配線等で接続することなく、対向側部品に設置された制御装置により摩耗側部品の摩耗状態を適切に検知する。
【解決手段】本発明の摩耗検知装置は、対向側部品3に設けられ、相異なる複数の周波数成分を含む混合信号を発生する信号発生部8と、混合信号を対向側部品3から摩耗側部品2に伝達する信号伝達部6と、摩耗側部品2に設けられ、摩耗側部品2の摺動面に沿って配置された先端部41に、複数の周波数成分に対応したノッチフィルタ部5が設けられ、信号伝達部6からノッチフィルタ部5に混合信号が入力される摩耗ゲージ4と、混合信号の入力に応じてノッチフィルタ部5から出力される計測信号を、摩耗側部品2から対向側部品3に伝達する信号伝達部7と、対向側部品3に設けられ、計測信号に含まれる周波数成分に基づいて、摩耗ゲージ4の摩耗状態を検知する周波数分析部9とを備える。
(もっと読む)
弦楽器用弦高測定器

【課題】 弦楽器の弦高を精度よく測定し数値化する。
【解決手段】 被測定弦楽器に磁性体の計測弦を張りネック上に計測弦と空隙を持たせてU字型磁性体を置き、空隙を持った磁気回路を構成する。
この磁気回路に鎖交する一次コイルと二次コイルを置くと、これらの相互インダクタンスは空隙の大きさにより変化する。
この変化を一次電流と誘導二次電圧により計測する事で空隙の大きさを求め楽器ネックと弦の高さである弦高を測定する。
(もっと読む)
変位センサ装置及び転がり軸受装置
【課題】フレキシブルプリント基板を使用する変位センサ装置において、正確かつ迅速に、基板を支持部に固定することができる構造を提供する。
【解決手段】検出対象物(主軸部102a)に近接して設けられる支持部21と、この支持部21に沿って支持されたフレキシブルプリント基板22と、このフレキシブルプリント基板22に設けられ、検出対象物と対向する渦巻状のコイルを含むセンサ回路要素とを備えた変位センサ装置20において、フレキシブルプリント基板22を止め具23によって支持部21に固定する構造とし、フレキシブルプリント基板22は、センサ回路要素を含む基板本体22a、及び、当該基板本体22aから延伸して形成され、止め具23による固定の用に供する止め代部22bを有するものとする。
(もっと読む)
高周波発振形近接センサ
【課題】金属製の外装に収容しても検出対象物(鉄およびアルミ)に対して実用的な検出距離を有する近接センサを提供する。
【解決手段】検出用コイル10とコンデンサ6と非線形増幅器12とを含む発振回路5を有し、導電性を有する検出対象物7の近接に伴って生じる検出用コイル10のQ値の変化によって検出対象物7の有無または/および距離を検出する近接センサ4において、比透磁率が実質的に1であり、かつ、20℃での体積抵抗率が45×10-8(Ω・m)以上の金属からなるステンレスカバー1が検出用コイル10と検出対象物7との間に配置されており、検出対象物7が検出用コイル10に近接したときに、検出対象物7が強磁性体の場合には検出対象物7が無いときよりもQ値が減少し、検出対象物7が非磁性体の場合には検出対象物7が無いときよりもQ値が増加するように発振回路5の発振周波数を設定する。
(もっと読む)
真空ポンプ
【課題】予め回転基準位置に対する磁性体位置の位相差を計測しておく必要がなく、ポンプ組み立て作業が簡素化される真空ポンプの提供。
【解決手段】インダクタンス検出部44は、少なくとも一つの磁性体102が設けられたインダクタンス被検出面に対向するように隙間を設けて配設され、インダクタンス信号を出力する。演算手段313は、基準位相信号発生手段が発生する基準位相信号を基準とする複数の回転位相に関するインダクタンス信号S1〜S3に基づいて、回転基準位置に対する磁性体102の位置(位相差)を算出する。温度推定手段314は、演算手段313で算出された磁性体102の位置に基づいて、インダクタンス検出部44が磁性体102に対向したときのインダクタンス信号を抽出し、該インダクタンス信号に基づいてロータの温度を推定する。
(もっと読む)
荷重センサ及び変位量センサ
【課題】より簡単な構成で高精度の荷重検出を行うことができる荷重センサを提供する。
【解決手段】荷重センサ1は、固定側に取り付けられる基部3,及び基部3に対して弾性変形する起歪部4により両端部が支持され、印加される荷重に応じて基部3に対する相対位置が変位する可動部5を有してなる本体2と、VRセンサ部18との組み合わせで構成する。具体的には、1次コイル20及び2次コイル21を備えたステータコア19を基部3側、可動コア22を可動部5側にそれぞれ配置し、可動部5に荷重が加わり変位が生じるとステータコア19側のコイル20及び21と可動コア22との位置関係を変化させ、1次コイル20が発生した磁束に対して作用する磁気抵抗を変化させる。
(もっと読む)
変位センサシステム及び変位センサ
【課題】高精度な距離測定を安価に提供する。
【解決手段】平面状コイル1と、平面状コイル1と電気的に接続された発振回路と、平面状コイル1に近接する測定対象物WKと平面状コイル1との距離に応じて、発振回路の発振周波数が変化する様子を検出可能な周波数検出手段22と、周波数検出手段22で検出された発振周波数をデジタル信号として出力可能なデジタル出力手段24と、周波数検出手段22で発振周波数を検出する検出動作時間を制御可能な時間制御手段23と、時間制御手段23に対して、検出動作時間を指示する制御信号を送出可能な動作時間指示手段31を有するコントローラ30とを備える。周波数検出手段22で検出された発振周波数に基づいて測定対象物WKと平面状コイル1との距離変化を演算し、該演算結果をデジタル出力手段24によりデジタル値として出力可能とし、距離測定の測定精度及び距離測定結果を得るまでの応答時間に応じて、検出動作時間を可変とする。
(もっと読む)
物理量計測装置及び該物理量計測装置を備えた磁気浮上装置、真空ポンプ
【課題】センサの取り付け位置調整をすることなく良好な計測信号を得ることが容易に可能な物理量計測装置、及び該物理量計測装置を備えた磁気浮上装置、真空ポンプを提供する。
【解決手段】コイルのインダクタンス変化によって振幅変調された高周波電圧に基づいて物理量を計測するセンサにおいて、コイルに被変調高周波電圧の周波数特性又は高周波電圧の周波数の可変手段を設けることによって、コイル又はそのコアの取り付け位置調整を必要とせずにセンサ感度の調整を可能にする。また、差動手段を設け、計測信号と調整可能な基準値信号の差を出力することにより、消費電力を低減し低飽和増幅器の採用を可能にする。更に、上記の調整手段を磁気軸受若しくは真空ポンプの機構部に配置することによって、機構部とコントローラの互換性を向上する。
(もっと読む)
磁気記録媒体の保護膜厚測定方法および磁気記録媒体評価装置
【課題】磁気記録層上に保護膜を有する磁気記録媒体について、光学的測定を行うことなく電磁変換特性検査工程の中で保護膜厚検査も同時に行うことが可能となる方法を提供する。
【解決手段】本発明に係る磁気記録媒体の保護膜厚測定方法は、被測定媒体と保護膜厚が測定済みの参照用媒体のそれぞれについて、波数k1の正弦波信号を書き込み、再生信号振幅A1を測定し、次いで、前記波数k1と異なる波数k2の正弦波信号を書き込み、再生信号振幅A2を測定した後、それぞれの媒体について読み出し距離d1、d0を算出し、前記被測定媒体の読み出し距離d1と前記参照用媒体の読み出し距離d0との差から被測定媒体の保護膜厚を算出することを特徴とする。
(もっと読む)
センサ付き転がり軸受装置
【課題】車輪のモーメント荷重や軸方向の並進荷重を求めることが可能なセンサ装置を備え、上記センサ装置と独立のABSセンサを設置しなくても、回転軌道部材の回転速度を検出することができるセンサ付き転がり軸受装置を提供すること。
【解決手段】ターゲット部材73の外周面で構成される被変位検出部の一部に、軸方向に延在する溝155を有する環状部150を形成する。
(もっと読む)
センサ付き転がり軸受装置の製造方法
【課題】センサ付き転がり軸受装置の位置や、センサ付き転がり軸受装置に加わっているモーメント荷重の大きさを、精密に測定することができるセンサ付き転がり軸受装置を製造するセンサ付き転がり軸受装置の製造方法を提供すること。
【解決手段】内軸1、内輪2、外輪3、第1の玉4および第2の玉5を組み付ける。その後、内輪2の外周面の軸方向の一端部に、ターゲット部材61の軸方向の一端部を圧入すると共に、外輪3と内輪2との間のターゲット部材61側の開口を、シールド板7で密封する。この状態で、内軸1を、略内軸1の中心軸の回りに回転させた上で、ターゲット部材61の外周面を加工する。
(もっと読む)
被駆動体の位置検出装置
【課題】被駆動体の位置を検出するための専用のデバイスを追加することなく、被駆動体の位置を検出することができる被駆動体の位置検出装置を提供する。
【解決手段】被駆動体8と、コイル11b,12bが巻かれた電磁石11,12と、被駆動体に一体に設けられ、電磁石と対向するアーマチュア13と、コイル11b,12bに駆動電流IACを供給することにより、アーマチュア13を作動させ、被駆動体を駆動する駆動回路16と、を有する駆動装置において、被駆動体の位置を検出する被駆動体の位置検出装置であって、コイル11bの電圧を検出する電圧検出手段21と、駆動電流IACを検出する駆動電流検出手段22と、検出された検出電圧SVおよび検出電流SIに基づいて、被駆動体の位置を検出する位置検出手段30,40,50と、を備える。
(もっと読む)
ワーク着座検知装置とそれを用いたロケート装置およびワーク着座検知方法
【課題】光電センサタイプのワーク着座検知装置と同等の機能を有しながらも、そのコストダウンを図ったワーク着座検知装置を提供する。
【解決手段】下端に近接センサ34のヘッド部34aを臨ませたガイドチューブ37の上端にドッグ38を上下動可能に支持させるとともに、ガイドチューブ37内に検知プレート40を上下動可能に配置し、検知プレート40の上下に互いに拮抗する圧縮コイルスプリング41,42を配置する。検知プレート40のストロークS2はドッグ38のストロークS1よりも小さく設定してある。ドッグ38にワークが当接することによりそのドッグ38の動きに検知プレート40を追従変位させて、ドッグ38に対するワークの着座を近接センサ34にて間接的に検知する。
(もっと読む)
操舵角検出装置
【課題】簡素な構成にて全操舵角範囲に亘る操舵角を高精度に検出できる操舵角検出装置を提供する。
【解決手段】ラック軸1の軸長方向の一側から他側に向けて連続的に深さが変化する溝12がラック軸1に設けられ、サポートヨーク3に設けられた可動子41の一部を該溝12の底面に当接させ、ラック軸1の移動に応じて生じる可動子41の変位を検出して、車両の操舵角を算出する構成になっており、このように連続的に深さが変化する溝12を設けているため、ラック軸1の移動に応じて可動子41は当接部の深さに追随して変位することとなり、この変位により一義的にラック軸1の移動量を知ることができ、簡素な構成にて全操舵角範囲に亘る操舵角を高精度に検出できる。
(もっと読む)
コンクリート構造物の検査方法および検査装置
【課題】コンクリート構造物の鋼材(鉄筋、鉄骨)に発生する歪みを測定して検査する作業工数の増大やデータの信頼性を損なわずに、簡単に非破壊で精度良く検査することができるコンクリート構造物の検査方法および検査装置を提供する。
【解決手段】同一平面内に2個の微小な渦電流センサ2a、2bを内蔵した渦電流プローブ1を用いることにより、鉄筋10と渦電流プローブ1との相対的な位置関係の変化に影響されずに、鉄筋10の歪みを計測することができる。
(もっと読む)
機器を回転させるための位相検出器
【課題】回転部材間の回転位相関係を正確に検出する。
【解決手段】それぞれ回転可能に連結された部材に取り付けられた31個の数字の擬似ランダムM数列でコード化されている第1ディスクと第2ディスクとを有する。ディスクを31区画に分割し、ディスクの外周を、「1」に対応する区画は大きな半径を有し、「0」に対応する区画は小さな半径を有するように輪郭付ける。第1及び第2ディスクの外周付近に配置されたセンサーが、コード化された擬似ランダム数列を検出し、周期的にサンプル採取して、第1及び第2の検出された数列を生成する。第1及び第2の検出された数列は、ノイズを取り除き、+1から−1の間の範囲に処理され、その後、相互相関付けをして、取り付けられた回転部材の間の回転位相関係が求められる。
(もっと読む)
コンベヤベルトの摩耗検出装置
【課題】コンベヤベルトの摩耗量を、運転中に自動的に、しかも簡単かつ正確に検出できるようにしたコンベヤベルトの摩耗検出装置を提供する。
【解決手段】厚さ方向に磁化した複数の磁石シートM1〜M5を、表面に現れる極性が同方向であって、ベルト本体2の長手方向に向かって段階的に深くなるように埋設し、磁石シートM1〜M5の磁力の変化を検出する磁気センサ4を、磁石シートM1〜M5が通過する位置に配設する。
(もっと読む)
被測定物表面の形状測定方法及び被測定物表面の形状測定装置
【課題】本発明は、測定誤差が生じにくい被測定物表面の形状測定方法及び被測定物表面の形状測定装置を提供することにある。
【解決手段】本発明は、被測定物の表面に追従して変形する可撓性基板7上に複数のコイル6A〜6Qを所定間隔で配列した測定用プローブ2を用いて被測定物18の表面形状を測定するに際し、蓄積データとして各種曲率半径と誘起電圧との関係を準備し、その後、前記測定用プローブ2を前記被測定物の表面に密着させた状態で前記コイルの一つを励磁して別のコイルで誘起電圧を検出するように順次切換えて行くと共に、検出した誘起電圧を前記蓄積データの誘起電圧と対応させて励磁したコイルと誘起電圧を検出したコイル間の曲率半径を算出し、その算出結果に基づいて順次各コイルの座標を求めて被測定物の表面形状を測定するようにしたのである。
(もっと読む)
アライメント装置、アライメント方法、及びリソグラフィ装置
【課題】2つのデバイスを互いに対してアライメントする装置及び方法を提供すること。
【解決手段】これらのデバイスのうちの第1デバイスに近接スイッチが設けられ、これらの2つのデバイスのうちの第2デバイスに基準マークを設けることができる。この近接スイッチの検知領域に他のデバイスが入ると、近接スイッチの第1の状態が第2の状態に変わる。即ち、第1状態から第2状態までの移行は、近接スイッチに対する第2デバイスの相対位置の尺度である。近接スイッチに対する第2デバイスの相対位置が分かれば、これらのデバイスは互いに対して所望の相対位置に位置することができる。この近接スイッチを用いて他のデバイスの位置をいくつかの方向で決定することができる。第1デバイスの第2デバイスに対する相対位置及び方向の両方、即ち、回転を、近接スイッチを用いて決定することができる。
(もっと読む)
高い位置正確性で物体を処理するための装置
装置は半導体ウェハのような物体を正確に制御された位置で処理する。物体(19)は経路に沿って移動可能な作業テーブル(12)上に支持される。作業プラットフォーム(12)に取り付けられた懸架アクチュエータ部(14)は、経路に沿って支持構造上の軟磁素子(34)の表面に面する極を有する軟磁コア(24)と、極を介してコア(24)を通じて流れ、且つ、軟磁素子(34)を介して戻る磁界を発生するために電流を加えるための巻線(20)とを含む。センサ(17)は、位置基準素子(16)に対する懸架アクチュエータ部(14)の測定された位置を感知する。制御回路は、外部制御回路(40)と、内部制御回路(42)とを含む。外部制御回路(40)は、感知結果を受信し、アクチュエータ部(14)の測定された位置を所定値に規制するために、力設定点情報を決定する。内部制御回路(42)は、力設定点情報を受信し、力設定点情報に従って、アクチュエータ部(14)と支持構造(10)との間に力を実現するために、電流を制御する。 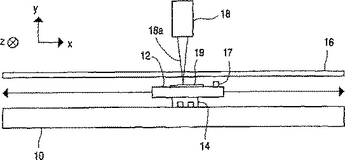 (もっと読む)
(もっと読む)
1 - 20 / 23
[ Back to top ]