
Fターム[2F063GA08]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 磁気的手段を用いた検出器 (1,967) | 電磁誘導型、コイルによる検出 (846) | インダクタンスの変化を検出 (379) | 渦電流センサ (185)
Fターム[2F063GA08]に分類される特許
81 - 100 / 185
センサ付き転がり軸受装置
【課題】変位や、回転速度等の物理量を検出するセンサを有すると共に、コンパクトなセンサ付き転がり軸受装置を提供すること。
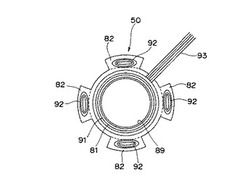
【解決手段】ターゲット部材が貫通している貫通穴89を有する環状かつ平板状の第1部分81と、この第1部分81に交差する平板状の第2部分82とを有する基板90の第1部分81に、貫通穴89を全周に亘って取り巻くように、第1コイル92を配置する。また、上記第2部分82に平面状の第2コイル92を配置する。第1部分81および第2部分82の夫々を、ポリイミド樹脂で構成し、第1コイル91を、第1部分81の内部に配置し、第2コイル92を、第2部分82の内部に配置する。
(もっと読む)
研磨監視方法および研磨装置

【課題】研磨装置の運転を停止させることなく渦電流センサの較正を行うことができ、精度の高い膜厚監視を可能とする研磨監視方法および研磨装置を提供する。
【解決手段】基板の水研磨時、研磨パッド10のドレッシング時、または研磨パッド10の交換時において、渦電流センサ50の出力信号を補正信号値として取得し、補正信号値から補正基準値を減算して補正量を算出し、導電膜を有する他の基板を研磨しているときの渦電流センサ50の出力信号から補正量を減算して実測信号値を算出し、実測信号値の変化を監視することにより研磨中の導電膜の厚さの変化を監視する。
(もっと読む)
研磨終了時点の予測・検出方法とその装置並びにリアルタイム膜厚モニタ方法とその装置
【課題】渦電流によるジュール熱損を極小に抑えるとともに、研磨終了時点を精度よく予測・検出し、また除去すべき残膜量及び研磨レート等をその場で精度よく算出して、所定の導電性膜が適正に除去されているかを正確に評価しうる研磨終了時点の予測・検出方法とその装置並びにリアルタイム膜厚モニタ方法とその装置を提供することを目的とする。
【解決手段】本発明は上記目的を達成するために、所定の導電性膜28に高周波インダクタ型センサにおけるインダクタ36を近接させ、該インダクタ36で形成される磁束により所定の導電性膜28に誘起される磁束変化をモニタし、研磨中の膜厚が所定の導電性膜28の材質を一因子として決まる表皮深さに対応する膜厚になった場合の磁束変化を基に研磨終了時点を予測するための磁束変化部分を検出し、該磁束変化部分から研磨終了時点を予測し、またその場で研磨レート及び除去すべき残りの膜厚量を算出する方法を提供するものである。
(もっと読む)
研磨終了時点の予測方法
【課題】導電性膜内の微細な配線に強い磁束によるジュール熱損を及ぼすことなく、研磨終了時点を精度よく予測する。
【解決手段】ウェーハWの導電性膜を除去する研磨工程において、ウェーハ上の導電性膜に二次元平面のインダクタ型センサ34を近接させて、インダクタ型センサによりウェーハの導電性膜に誘起される磁束をモニタする。インダクタの形状、インダクタと導電性膜との距離、発振周波数などの条件を導電性膜に表皮効果が働く程度に適正化し、研磨終了の直前に磁束のピークが出現するように構成する。研磨終了の直前では導電性膜を磁束が殆ど貫通せず、ウェーハ内の微細配線などを損傷する虞がなくなる。
(もっと読む)
芯出し調整支援装置
【課題】 再調整が発生しない的確な調整量の指示を行うことができる芯出し調整装置を提供する。
【解決手段】 固定側回転機器の回転軸と、少なくとも4点の台座上へのボルトによる固定箇所を有する調整側回転機器の回転軸と、の芯を出すための芯出し調整支援装置であって、調整側回転機器の回転軸と固定側回転機器の回転軸との変位を計測する変位センサーと、変位センサーからの出力に基づいて、台座上への調整側回転機器のボルトによる固定前の調整側回転機器の回転軸と固定側回転機器の回転軸とのずれ量を計算するとともに、台座上への調整側回転機器のボルトによる固定後の調整側回転機器の回転軸と固定側回転機器の回転軸とのずれ量を計算し、固定前のずれ量と固定後のずれ量から補正量を計算し、補正量に基づいてずれ量を補正して、補正されたずれ量から調整側回転機器の位置の調整量を算出する情報処理部と、を有することを特徴とする。
(もっと読む)
微小凹凸表面欠陥の検出方法及び装置
【課題】表面粗さの粗い被検査対象物において通常視認困難で、砥石がけ検査により検出しているような自動検出が困難な凹凸が数μm程度の微小凹凸欠陥を確実に検出できる実用的な微小凹凸表面欠陥の検出方法及び装置を提供することを目的とする。
【解決手段】磁性金属被検体の凹凸量0.5μm以上6μm以下の微小凹凸表面欠陥を検出する微小凹凸表面欠陥の検出方法であって、前記被検体の欠陥部の歪に起因する信号を検知することによって前記表面欠陥を検出する。
(もっと読む)
渦電流センサ、硬化層深さ検査装置及び硬化層深さ検査方法
【課題】、渦電流効果を利用した非破壊検査技術であって、鋼材の表面焼入れの硬化層深さを、検査雰囲気の温度が変動しても精度を低下させることなく検査できるものを提案し、製造時にインラインでの全数検査の実現に寄与する。
【解決手段】硬化層深さ検査装置10に、同心状又は同軸状に配置された物理的構造の異なる二つの検出コイル32・33を、励磁コイル31に同心状に内挿して成るプローブと、センサ本体12とを備えた渦電流センサ13と、評価装置15とを備える。前記渦電流センサ13にて、前記励磁コイル31に交流電流を流して磁場を発生させるとともに、前記磁場により被検体Wに発生した渦電流を検出した前記二つの検出コイル32・33の検出信号を受信して、これらの検出信号の差に基づく値を評価装置15に出力し、前記評価装置にて、前記渦電流センサの出力値を前記閾値と比較して被検体Wの硬化層深さの良否を評価する。
(もっと読む)
位置決め制御システム
【課題】高精度かつ高速な位置決め制御を可能にする。
【解決手段】位置決め制御システム1において、変位センサ4は、共振回路6に対して所定数の駆動信号を出力すると共に、駆動信号出力停止後に共振回路6から減衰状に出力される自由振動波の数をカウントし、該カウント数が所定数Nに達したか否かを判断する自由振動波カウント処理を行い、該自由振動波カウント処理に要した時間測定にもとづいて自由振動波の位相ズレ成分を検出するにあたり、一回の自由振動波カウント処理における自由振動波のカウント数Nを変更可能であり、置決め制御装置5は、可動体2の目標位置Tに対する検出位置Kの偏差Hに応じて、変位センサ4にカウント数Nの変更指令を出力する手段を備え、該手段が偏差Hの減少に応じてカウント数Nを増加させる。
(もっと読む)
スクリューフィーダーの異常検出方法。
【課題】スクリューフィーダーのスクリュー翼とスクリューケースとの間隔を正確に把握し、スクリューフィーダーの異常を確実に検出する方法を提供することにある。
【解決手段】スクリューフィーダーの内部にスクリュー翼を有する部位のスクリューケースの外周部に渦電流センサを設け、スクリュー翼とスクリューケース内面との間隔を測定し、異常を検出することを特徴とする、すなわちスクリュー翼とスクリューケースとの間隔を直接、非接触で測定することによって、スクリュー翼等の異常によるスクリュー翼とスクリューケースの異常接近を確実に検出することができる。
(もっと読む)
攪拌乾燥機の異常検出方法。
【課題】攪拌乾燥機の攪拌羽根と乾燥機胴体との間隔を正確に把握し、攪拌乾燥機の異常を確実に検出する方法を提供することにある。
【解決手段】内部に攪拌羽根を有する攪拌乾燥機の乾燥機胴体の外周部に渦電流センサを設け、攪拌羽根と乾燥機胴体との間隔を測定し、異常を検出することを特徴とする、すなわち攪拌羽根と乾燥機胴体との間隔を直接、非接触で測定することによって、攪拌軸や攪拌羽根等の異常による攪拌羽根と乾燥機胴体の異常接近を確実に検出することができる。
(もっと読む)
局所的な測定範囲におけるコイル配置構造
【課題】外乱の影響を受けないコイル配置構造を提供すること。
【解決手段】コイル配置構造において、a)コイル対を、フラットコイルとして形成するとともに測定範囲内で互いに重ね合わせ、このとき、この重ね合わされた範囲が測定範囲を形成し、b)前記測定範囲の各端部において前記コイル対にその長さについての余剰部を形成し、c)渦電流式制振要素を、前記コイル対に対して変位可能に形成するとともに該コイル対における両コイルの少なくとも一部を覆うように形成し、d)測定発振器を有する前記コイル対におけるコイルそれぞれが、局所の関数としての発振器周波数の線形特性線を有しており、e)該各線形特性線が、外乱、すなわち前記間隔のばらつき、測定方向への傾斜及び温度変化にかかわらず一定の回転中心を前記測定範囲の外方に有している。 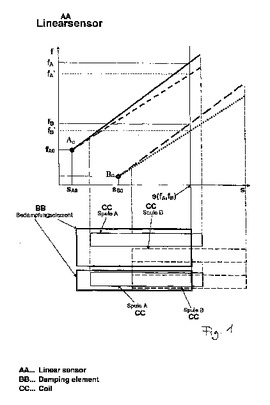 (もっと読む)
(もっと読む)
角度検出センサおよびその角度検出センサを備えた吸入空気量制御装置
【課題】ロータのショートリング状コイル(プリント印刷導体)の寸法が長いため、ショートリング状コイルの抵抗が大きく、発生する誘導電流が十分に大きくできない。このため、ステータ側の検出コイルに誘導する電流が大きくできず、ステータの電磁コイルと検出コイルとの間の電磁誘導結合の変化が小さく、結果的に高精度の角度検出センサを提供できないという問題がある。
【解決手段】ロータ部には、励磁コイルに近接したロータ周辺部に回転方向に周期的にそれぞれ電気絶縁された第一の複数のショートリング状コイルと、前記第一の複数のショートリング状コイルと電気絶縁され、一部が前記第一の複数のショートリング状コイルに近接し且つ回転軸の周囲を取り囲むように第二のショートリング状コイルを配置した。
【効果】出力の増大が図られ高精度の角度検出センサを提供することが出来る。
(もっと読む)
膜厚測定装置、膜厚測定方法および記録媒体
【課題】渦電流損失測定センサ、膜厚測定装置、膜厚測定方法およびコンピュータ読取り可能な記録媒体を提供する。
【解決手段】高周波磁界を励磁して導電性膜9に渦電流を励起させるコイルと、渦電流に起因する渦電流損失の影響を受けた高周波電流を出力するコイルとを有する渦電流損失測定センサ20と、コイルが出力する高周波電流から渦電流損失測定センサ20のインピーダンスの変化、高周波電流の電流値の変化または高周波電流の位相の変化を測定して渦電流損失量を測定するインピーダンスアナライザ48と、導電性膜9と渦電流損失測定センサとの距離を測定する光学式変位センサ32と、インピーダンスアナライザ48と光学式変位センサ32の各測定結果に基づいて導電性膜9の膜厚を算出する膜厚演算部54を含む制御コンピュータ42と、を備える膜厚測定装置1。
(もっと読む)
研磨途中時点の検出方法と研磨装置並びに研磨状態モニタ方法と研磨終了時点の検出方法
【課題】CMPにおいて、渦電流によるジュール熱損を極小に抑えるとともに、所定の導電性膜が適正に除去されているかを正確に評価する。
【解決手段】導電性膜を研磨し、前記所定の導電性膜に高周波インダクタ型センサにおけるインダクタを近接させ、該インダクタで形成される磁束により前記所定の導電性膜に誘起される渦電流の変化をモニタする方法であって、前記所定の導電性膜の材質を一因子として決まる表皮効果により、研磨除去による前記導電性膜の膜厚減少に伴って前記導電性膜を貫通する磁束が増大して導電性膜に誘起される渦電流が増加するステップと、その後の更なる研磨による膜厚減少に伴って、渦電流を生じうる実質的な導電性膜厚の減少により、前記誘起される渦電流が減少へ転じるステップとを有し、該転じるステップの変化点を検出することを特徴とする、研磨途中時点の検出方法を提供する。
(もっと読む)
脚式移動型ロボット
【課題】床面までの距離を正確に測定することができる脚式移動型ロボットを提供すること。
【解決手段】本発明の一態様にかかる脚式移動型ロボットは、脚部によって床面を移動する脚式移動型ロボットであって、脚部10に設けられた足平本体部40と、足平本体部40に対して摺動可能に取り付けられ、足平本体部40の底面よりも床面側に突出する可動部51と、可動部51の摺動位置を検出する変位センサ57と、可動部51が足平本体部40の足裏面40aに近づく方向の摺動端において、可動部51の下端が足平本体部40よりも床面側に突出するよう、可動部51の摺動範囲を規制する係止部59と、を備えるものである。
(もっと読む)
圧延機ワークロールのロールギャップ測定装置
【課題】ロールギャップを高精度に測定でき、且つクロスロール圧延機などのクラウン制御ミルにも適用可能なロールギャップ測定装置を提供する。
【解決手段】上下ワークロール1a,1bのうちの少なくとも一方のワークロールの外周部に、バックアップロール及び被圧延材と干渉しないように設けられる渦流式距離センサ5と、この渦流式距離センサ5への電力供給及び渦流式距離センサ5の測定信号の取り出しを行うためのスリップリング機構6を備える。一方のワークロールの外周部に設けられた渦流式距離センサ5は、他方のワークロールとの最短距離を磁気的に高精度に測定できるので、外乱の影響を受けることなくロールギャップを高精度に測定することができ、しかも、クロスロール圧延機などのクラウン制御ミルにも適用可能である。
(もっと読む)
回転角度算出装置及び変位量算出装置
【課題】少ないセンサで内側回転体の外側回転体に対する相対回転角を算出する回転角演算装置を提供する。
【解決手段】内側回転軸と外側回転軸が同心に配置され、内側回転軸に直交する面内及び内側回転軸に平行な方向に相対変位可能に負荷に応じて変形する弾性部材によって連結された内側回転体及び外側回転体を有する回転体と、内側回転体または外側回転体と一体的に回転し、該一体的に回転する回転体の回転軸の中心から等しい距離にある周方向の4箇所に設けられた第1及び第2被測定部と、他方の内側回転体又は外側回転体と一体的に回転し、該他方の回転体の回転軸の中心から等しい距離にある周方向の4箇所以上に配置され、周方向と直交する方向に対向する被測定部材の被測定部位までの距離を検出する変位センサと、変位センサにより検出された複数の距離に基づいて、内側回転体と外側回転体との間の相対回転角を算出する演算手段とを具備する。
(もっと読む)
ガスホルダ、ガスホルダのシールゴム摩耗検知方法及び装置、及びガスホルダの改造方法及び装置
【課題】ホルダ側板を傷付けることのない摩耗量検知手段であって、かつ上下に複数段に配置されたシールゴムの摩耗量の平均値を精度良く検知できるとともに、シールゴムの摩耗量の遠隔監視を可能とする。
【解決手段】筒形をなすガスホルダ1の側板2とホルダ側板2に沿って上下に摺動するピストン8との間の機密を保持する上部シールゴム31及び下部シールゴム32の摩耗量を検知するガスホルダのシールゴム摩耗検知方法において、上下方向に間隔を置いて多段に設けられた前記シールゴム31及び32間の間隙に該シールゴムと同一の支持部材34に一体的に固定された非接触式の距離センサ58により、距離センサ58とホルダ側板2との距離を測ることによって、該シールゴムの摩耗量を検知する。
(もっと読む)
変形センサシステム
【課題】ホイートストン・ブリッジ回路を用いることなく、外力を受けたか否かを高精度に判定することができる変形センサシステムを提供する。
【解決手段】外力を受けた場合に弾性変形し、弾性変形量に応じて電気抵抗が変化する弾性材からなる変形センサ12と、変形センサ12の電気抵抗R1、所定容量のコンデンサC1、および、増幅器22aにより構成される発振回路22と、発振回路22の発振周波数fをデジタル信号として計測する周波数カウンタ24と、変形センサ12が外力を受けていない場合に周波数カウンタ24により計測された発振周波数fを基準周波数f0として予め記憶する基準周波数記憶部25と、変形センサ12が外力を受けた場合に周波数カウンタ24により計測された発振周波数f1と基準周波数f0との差分Δfを算出する差分算出部26と、周波数の差分Δfに基づいて変形センサ12が外力を受けたか否かを判定する判定部27とを備える。
(もっと読む)
基板検査システム
【課題】従来の電子部品が実装された基板検査は、目視検査による実装の有無及び実装状態を判定しているため、検査時間を要し負担が大きく人為ミスが発生する虞がある。
【解決手段】本発明は、基板に実装された各電子部品に対して当接する可動軸を有するリニアスケールプローブが複数配置された検査パネルを備え、検査パネルを基板に宛がい、電子部品に当接した可動軸の移動により、リニアスケールプローブ内の高周波電力が印加される励磁コイルから発する磁界中を磁性体が移動し、磁性体の磁界移動から検出コイルにより検出された電圧信号に基づき、基板に実装される電子部品の有無及びその実装状態を検査して判定する基板検査システムである。
(もっと読む)
81 - 100 / 185
[ Back to top ]