
Fターム[2F063GA36]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 磁気的手段を用いた検出器 (1,967) | 電磁誘導型、コイルによる検出 (846) | 移動子、回転子に巻線のないもの (11)
Fターム[2F063GA36]に分類される特許
1 - 11 / 11
リニアセンサ
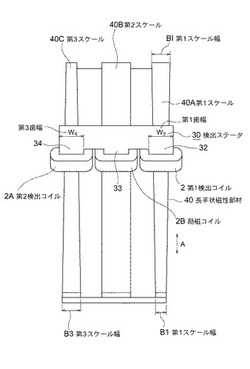
【課題】本発明は、検出コイルとテーパ状の複数のスケールの組合わせにより簡単な構成で高性能の直線検出を行うことを目的とする。
【解決手段】本発明によるリニアセンサは、長手状磁性部材(40)の上に貼り合わせた第1、第2、第3スケール(40A,40B,40C)と、前記各スケール(40A,40B,40C)に対応する第1〜第3突出歯部(32〜33)を有するE型の検出ステータ(30)と、を備え、前記第1、第3スケール(40Z,40C)の第1、第3スケール幅(B1,B3)は長手方向(A)に沿ってテーパ状に変化し、長手方向の位置を第1、第2検出コイル(2,2A)で検出する構成である。
(もっと読む)
磁歪式トルク・回転角検出装置

【課題】簡易な構造で小型化を図ることができるトルク・回転角検出装置を提供することを課題とする。
【解決手段】磁歪式トルク・回転角検出装置20は、回転軸16と、回転軸16に被覆され且つ磁気異方性が付与されている第1磁歪膜部27と、磁気異方性が第1磁歪膜部27とは逆方向に付与されている第2磁歪膜部28と、磁気異方性は付与されてない第3磁性膜部29と、第1磁歪膜部27に臨んで配置されている第1検出コイル31と、第2磁歪膜部28に臨んで配置されている第2検出コイル32と、第3磁性膜部29に臨んで配置されている第3検出コイル33と、からなる。
【効果】部品数が少なく、配置もまとまっているので、検出装置を簡易な構造にして小型化を図ることができる。
(もっと読む)
荷重センサ及び変位量センサ
【課題】より簡単な構成で高精度の荷重検出を行うことができる荷重センサを提供する。
【解決手段】荷重センサ1は、固定側に取り付けられる基部3,及び基部3に対して弾性変形する起歪部4により両端部が支持され、印加される荷重に応じて基部3に対する相対位置が変位する可動部5を有してなる本体2と、VRセンサ部18との組み合わせで構成する。具体的には、1次コイル20及び2次コイル21を備えたステータコア19を基部3側、可動コア22を可動部5側にそれぞれ配置し、可動部5に荷重が加わり変位が生じるとステータコア19側のコイル20及び21と可動コア22との位置関係を変化させ、1次コイル20が発生した磁束に対して作用する磁気抵抗を変化させる。
(もっと読む)
誘導式位置センサー、誘導式位置センサーを備えた測定システム及び位置センサーの動作方法
本発明は、受信導体(1.11,1.12,1.13;1.21,1.22,1.23)で検出した信号(S1.11,S1.12,S1.13;S1.21,S1.22,S1.23)から、先ずは三つのデジタル信号(S3.51,S3.52,S3.53;S3.61,S3.62,S3.63)を生成することが可能であるように構成された電子回路(3)を備えた誘導式位置センサーに関する。本発明では、これらの三つのデジタル信号(S3.51,S3.52,S3.53;S3.61,S3.62,S3.63)の組合せによって、少なくとも二つの位置の値(P,P3.71,P3.72;P3.81,P3.82,P3.83)を算出することが可能であり、これらの位置の値(P,P3.71,P3.72;P3.81,P3.82,P3.83)を比較器(3.20,4.1)に供給することが可能である。更に、本発明は、誘導式位置センサーの動作方法、並びに位置センサーに加えて、データインタフェース(5.20,4.20)と、比較器(4.1)を備えた後続の電子機器(4)とを有する測定システムに関する。 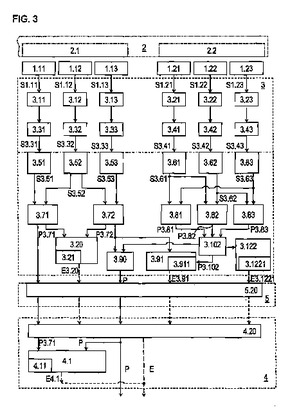 (もっと読む)
(もっと読む)
エンコーダ及びこのエンコーダを操作する方法
【課題】停電時のエネルギー消費を低下させた絶対位置測定用エンコーダを提供する。
【解決手段】励磁電流Iが、スイッチ素子2.25を切り替えることによってターンオン期間を有するターンオンパルスで生成されること、及び、前記ターンオンパルスの立ち下りエッジ後の領域内で位置情報を算出するため、第1検出巻線2.221および第2検出巻線2.222内で誘導した少なくとも1つの電圧(U1,U2,U3,U4)が測定される。
(もっと読む)
センサ付軸受装置
【課題】外部磁束に強く、高分解能な回転状態信号を出力可能なセンサ付軸受装置を提供する。
【解決手段】内輪16と外輪18との間にボール20が配置された軸受12と、回転輪としての内輪16に支持または、一体に形成された回転部材22と、静止輪としての外輪18に支持されて回転部材22の外周面を包囲する円筒部材26と、円筒部材26に配置された一対の検出コイル28、30と、各検出コイル28、30の出力にしたがって回転部材22の回転状態を検出する回転状態検出器とを備え、回転部材22は、磁性材料で構成され、回転部材22には軸方向に伸びる溝24が複数状形成され、円筒部材26には回転部材22の相対回転位置に応じて溝24との重なり具合が変化するように窓32、34が複数列形成され、各列の窓32、34が各検出コイル28、30によって包囲され、検出コイル28、30からは回転部材22の回転状態を示す2相信号が出力される。
(もっと読む)
超小型絶対位置センサを用いたハンドインターフェースグローブ及びこれを用いたハンドインターフェースシステム
【課題】超小型絶対位置センサを用いて指関節の絶対位置を測定した信号を用いて仮想空間の仮想ハンドモデルを制御し仮想空間の客体と相互作用できるようにして現実空間の使用者の手動きを精密で正確に仮想空間の仮想のハンドモデルの動きと自然に一致されるように現実空間と一致度の高い自然な手の動きおよび視覚的一致感を支援するグローブ及びこれを使用したシステムを提供する。
【解決手段】指関節の絶対位置を測定する超小型絶対位置センサを用いて指関節の微素変位を測定し、測定された指関節の動きを用いて仮想のハンドモデルの動きを制御し仮想環境の客体と相互作用して、使用者の体形の大きさによって異なる変化距離の補正を簡単な2つの動作にてできるようにして仮想の製品品評などの高品質の仮想現実技術に接し、実際と類似に製品の品評過程を模擬して製品の欠陥と誤謬を事前に検出でき、全体的に製品の生産過程及び設計過程を短縮させる効果がある。
(もっと読む)
測定器
【課題】 操作性が高く、かつ、検出精度、検出分解能が高い測定器を提供する。
【解決手段】 スピンドル300の回転に応じてスピンドル300の異なる回転角に対して異なる値の位相信号を発信する位相信号発信手段400と、位相信号を演算処理してスピンドルの絶対位置を求める演算処理部500と、を備える。位相信号発信手段は、位相信号を所定のピッチで発信する。スピンドル300の異なる回転角に対して位相信号は異なる値であるので、位相信号からスピンドル300の回転角が一義的に決定される。インクリメンタル式と違って、位相信号の読み飛ばし等が問題とはならないので、スピンドル300の高速回転を許容して測定器の操作性を向上させることができる。さらに、位相信号の読み飛ばしが問題とはならないので、スピンドル300の回転に対する位相信号の変化を細密化できる。
(もっと読む)
位置検出装置
【課題】 磁石の近接に応じた磁性体の磁気飽和特性を利用した位置検出を行う。
【解決手段】 検出対象位置に応じて検出部に対して磁石30を相対的に変位させる。検出部は、磁石に対して相対的に移動可能に設けられてなり、交流励磁される巻線手段3と該巻線手段に対応付けて配置された磁性体コア2とを含み、該磁性体コアに対する該磁石の近接に応じて該磁性体コアにおける該磁石の磁化力を強く受ける箇所において磁気飽和を生じさせて該磁性体コアの透磁率を低下させると共に、該磁石の相対的移動に伴う前記磁化力の変化に応じて磁気飽和を生じさせない状態となることにより該磁性体コアの透磁率が増加される。このように、検出対象の変位に応じて磁気飽和を生じさせない状態と磁気飽和を生じさせる状態との間で磁性体コアの透磁率が変化し、これに伴い巻線手段のインダクタンスが変化し、このインダクタンスの変化に基づく出力信号を得る。
(もっと読む)
回転センサ
【課題】 回転センサのロータセンシング部と励磁コイル間のずれに基づく異常を検知する。
【解決手段】 シャフトSに取り付けられ、周方向に幅が変化するセンシング部12を有するロータ10と、センシング部とで磁気回路をなす励磁コイルと、励磁コイルを保持する磁性材のコア本体31a,32aとを有し、固定部材に取り付けてセンシング部に対してシャフト軸線方向に対向配置される固定コアとを備え、固定コアがセンシング部周方向に所定間隔で対向配置され、かつその励磁コイルが位相シフト部110を形成し、当該シフト部は発振部100と位相シフト量検出部120に接続され、一方の励磁コイルに接続された位相シフト量検出部の位相シフト量の振幅に上下限の少なくとも一方を設けてこれを一定値で飽和させ、この値と比較した際の他方の励磁コイルの位相シフト量検出部の位相シフト量の値に基づいて異常検知する。
(もっと読む)
回転型位置検出装置
【課題】 検出装置の小型化、簡素化。
【解決手段】 ステータ部10には所定交流信号で励磁されるコイル11,12を配置し、2次コイルは持たない。ロータ部20には回転位置θに応じて各コイル11,12のインピーダンスを変化させるように所定形状の磁性体又は導電体からなる磁気応答部材21を設ける。このインピーダンス変化に基づき所定の回転角範囲にわたって各コイル11,12の端子間電圧が増減変化する。回転位置θの影響を受けない箇所に設けられた交流励磁されるコイル13により、前記増減変化の中点に対応する基準電圧を発生し、各コイル11,12から取り出した電圧と演算することで、零点を中心にして正負に振れる第1及び第2の周期的振幅関数を振幅係数として持つ第1及び第2の交流出力信号sinθsinωtとcosθsinωtを生成する。この振幅位相成分θにより回転位置θが検出される。
(もっと読む)
1 - 11 / 11
[ Back to top ]