
Fターム[2F063HA14]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 静電容量変化型検出器 (661) | 極板形状 (60) | 櫛歯形 (20)
Fターム[2F063HA14]に分類される特許
1 - 20 / 20
位置センサ、計測システム及び平面ステージ
【課題】本発明は、静電容量を利用して簡易な構成で計測対象の変位を計測する。
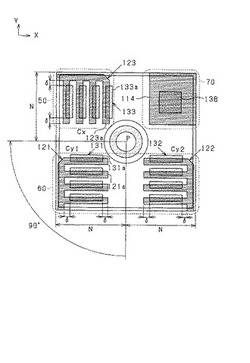
【解決手段】本発明は、移動ステージの位置を計測する位置センサ100を提供する。位置センサ100は、第1の固定対向電極対111,121の間に部分的に挿入されている第1の可動電極131と、第2の固定対向電極対112,122の間に部分的に挿入されている第2の可動電極132と、第3の固定対向電極対113,123に部分的に挿入されている第3の可動電極133とを備える。第1の対向電極は、第2の対向電極に対して第1の方向にシフトした位置に配置され、第3の対向電極は、第1の対向電極に対して第2の方向にシフトした位置に配置されている。
(もっと読む)
引張変形検知布

【課題】障害者、人型ロボットの身体挙動を検知するシステムに使用される引張変形検知布において、編物又は織物の伸縮を静電容量の変化として検出することにより、検知システムとしての消費電力を抑制する。
【解決手段】複数の導電糸11を含んで構成された織物10を一方向に伸縮自在にすると共に、その伸縮に伴って導電糸11の隣接するもの同士の間隔が変化し、その隣接する導電糸同士間は絶縁状態が維持されるように構成され、隣接する各導電糸11の端部が静電容量を測定するための一対の電極13,14とされている。織物10の伸縮を静電容量として検出するため、導電糸11には電圧は印加されても電流は流れず、この部分での消費電力はゼロとすることができ、検知システム全体としての消費電力を抑制することができる。
(もっと読む)
位置検出装置
【課題】位置検出性能の低下を防ぎ、安定した位置検出性能を得られる、複数の位置検出方式を備える位置検出装置を提供する。
【解決手段】第1の位置検出方式における送信導体の選択位置情報を第2の位置検出方式における信号受信のための導体選択に利用することで、第1の位置検出方式における送信導体と第2の位置検出方式における受信導体との間の空間的距離を可能な限り離間させる。更には、第1の位置検出方式における送信導体に供給される送信信号と第2の位置検出方式における送信導体に供給される送信信号との間に周波数インターリーブの関係を備える。
(もっと読む)
変位センサおよび力検出装置
【課題】力・モーメントを独立検出する装置の薄型化を図る。
【解決手段】変位基板10側に電極E11,E12、固定基板20側に電極E21,E22を設け、両基板をバネ31〜34で接続する。E11,E21は、γ軸を中心とした円形電極で、αβ平面上へ投影すると、E21はE11内に包含される。E12,E22は、α軸方向にオフセット配置された矩形電極で、E12のβ軸方向幅は、E22のβ軸方向幅内に包含される。E11,E21間の容量値C1は、変位Dγの情報のみを示し、E12,E22間の容量値C2は、変位DαおよびDγの合成情報を示すので、両者を用いて、変位Dα,Dγを独立検出できる。より広い基板の複数N箇所にローカル原点Qを設定し、それぞれ所定の向きにαβγローカル座標系を定め、それぞれに同様の電極を配置する。各原点Qについての検出値Dα,Dγを統合して、基板全体に作用した力・モーメントを検出する。
(もっと読む)
位置検出装置
【課題】最小限の回路構成で、入力面上の複数の指の存在を確実且つ高速に検出する、位置検出装置を提供する。
【解決手段】受信側電極を差動増幅部の正極入力端子と負極入力端子のいずれかに必ず接続する切替スイッチを設ける。この切替スイッチに対し、正極入力端子に接続される電極子が複数並ぶ正極領域と、負極入力端子に接続される電極子が複数並ぶ負極領域と、電極子が正極入力端子と負極入力端子に交互に接続される不感領域とを形成するべく制御する。
(もっと読む)
位置検出装置、位置検出回路及び位置検出方法
【課題】簡単な構成で人体を介して混入するノイズも効果的に相殺する、極めて精度が高く有用な位置検出装置を提供する。
【解決手段】受信電極を構成する各々の受信電極を三分割し、中心の電極を差動増幅器のプラス側入力端子に、両脇の電極を差動増幅器のマイナス側入力端子に接続することで、人体の指から混入するノイズを差動増幅器で効果的に相殺することができる。その際、従来技術の静電容量方式の位置検出装置のハードウェア構成はほぼそのままに、ソフトウェアをマトリクス電極に合わせて変更するだけで、容易に実現できる。
(もっと読む)
計測機能付きチャック装置及びロボットチャック装置
【課題】計測機構が小型軽量で且つ適切に収容され、計測精度を向上できると共に、安価に製造できる計測機能付きチャック装置及びロボットチャック装置を提供すること。
【解決手段】一方の電極11に対し、他方の電極12が、所要の間隔を保ちつつスライド可能に配されたセンサー部10と、両電極11、12に関する静電容量を検出する容量検出素子40と、容量検出素子40によって得られた信号に基づいて一方の電極11に対する他方の電極12の変位に関する計測情報を出力する計測情報出力回路50と、一方の電極11が固定されると共に、計測と同時に保持されるべきワークの一端側に当接されるストッパ部22を有するチャック用基部20と、他方の電極12が装着されて一体となってストッパ部22に対して接離動可能に設けられ、前記ワークの他端側に当接されるチャック用可動爪部30とを備える。
(もっと読む)
位置検出装置
【課題】透過性や薄さを損なうことなく表示機能を搭載した位置検出装置を提供する。
【解決手段】透明導電膜からなる第一の電極102と、第二の電極310と、第一及び第二の電極102,310間に介在して設けられた表示材料311と、第一及び第二の電極102,310間に駆動電源の供給を停止した後も表示状態を保持可能な表示部505と、表示すべき信号に基づき表示部505の表示駆動を行う表示駆動部502と、指示体103による第一の電極102上の指示位置を検出して検出信号を出力する位置検出部503と、を具備することを特徴とする。
(もっと読む)
静電型エンコーダ
【課題】静電気作用で位置情報を検出でき、必要に応じて固定子を可能な限り長尺化できる静電型エンコーダを提供する。
【解決手段】この静電型エンコーダは、誘導電極および電位検出電極を有する固定子31、櫛歯状電極を有し、固定子の上で移動するように設けられた移動子32と、固定子の電位検出電極から出力される信号に基づいて固定子に対する移動子の相対的変位に係る出力信号を生成する信号処理装置50とを備え、固定子の電位検出電極は4相の電極31cを含み、複数の固定子は、4相の電極(A,B,C.D)が規則的な距離位置に配列するように配置され、複数の固定子の各々の間に、4相の電極同士を接続する接続回路部112を備える。
(もっと読む)
スライド操作装置
【課題】静電誘導型エンコーダを用いたスライド操作装置を提供することを目的とする。
【解決手段】スライド操作装置1は、一点鎖線で示されるケース体11に覆われており、パネル2の裏面に取り付けられる。移動体15は、ガイドシャフト13,14により案内支持されてスライド移動する。固定子基板12には、長手方向に延在する固定子電極(励振電極と電位検出電極)20が形成され、移動子基板19には、固定子電極20に静電結合される移動子電極(浮遊電極)21が形成されている。移動子電極21は、固定子電極20と静電誘導で結合する電極であるので、ケース体11からの配線を必要としない。
(もっと読む)
ステージの位置変動検出装置およびこれを備えた搬送装置
【課題】ステージの目的位置で停止させた後に生じる位置変動(ドリフト)を正確に検出できるようにする。
【解決手段】 固定体に対して相対移動可能なステージの位置変動を検出する装置であって、前記固定体に設けられた検出用固定電極と、前記ステージに設けられた検出用移動電極とを有して構成された、前記ステージの移動にともなって各電極間の電気容量が変動する検出用コンデンサ部と、前記固定体に設けられた参照用固定電極と、前記ステージに設けられた参照用移動電極と、を有して構成された、前記ステージの移動の最中における各電極間の電気容量が略一定とされた参照用コンデンサ部と、前記検出用コンデンサ部および前記参照用コンデンサ部の双方に電圧を印加する電源と、を備え、前記参照用コンデンサ部の電気容量の変動に応じて、前記電源から印加する前記電圧を制御することを特徴とする、ステージの位置変動検出装置を提供する。
(もっと読む)
パッシブマトリックス式多点接触タッチセンサのための走査特性変更式分析用電子回路
本発明は、パッシブマトリックス式多点接触タッチセンサ(1)のための分析用電子回路であって、このマトリックスの2つの軸の一方に電力を供給する手段と、このマトリックスの他方の軸による電気的特性を、これら2つの軸のノードにおいて検出する手段と、を有し、少なくとも1つの走査特性を局所的または時間的に変更することを特徴とする分析用電子回路に関する。本発明は、このような分析用電子回路をさらに有するパッシブマトリックス式多点接触タッチセンサ(1)にも関する。 (もっと読む)
分割電極構造を有する接触感知パネル及びこれを備えた接触感知装置
接触感知パネルであって、基板の一面に配置される複数の感知電極及び前記複数の感知電極の一側に連結される導線を含み、前記各感知電極は前記一側の反対方向に突出する凸部と前記一側に向かって窪む凹部をそれぞれ少なくとも1つ含む。前記各感知電極の凸部は隣接する少なくとも1つの感知電極の凹部に挿入する形態で配置されることを特徴とする。 (もっと読む)
センサ素子および物理センサ装置
【課題】検出感度の向上を図ることができるセンサ素子の提供。
【解決手段】センサ素子1は、互いに逆向きに形成された第1の櫛歯電極132,133および第2の櫛歯電極134,135を有し、ベース部14に弾性的に支持されるとともに櫛歯の凹凸方向に振動する振動部13と、第1の櫛歯電極132,133と噛合する第3の櫛歯電極112,113を有し、ベース部14に固定された固定部11と、第2の櫛歯電極134,135と噛合する第4の櫛歯電極122,123を有し、ベース部14に弾性的に支持されて外力の作用により櫛歯の凹凸方向に変位する可動部12とを備える。
(もっと読む)
近接検出装置及び近接検出方法
【課題】 物体の接近を電極の浮遊容量により検出近接センサーにおいて、ノイズの影響を除去し、物体との距離が大きい場合でも高速で精度の高い位置検出を行うことの出来る近接検出装置を提供する。
【解決手段】 差動電極に位相の反転した充放電を行い、充放電の特性から差動電極の浮遊容量の和を求めることにより、ノイズをキャンセルされた浮遊容量から物体の接近や位置を検出するようにした。
(もっと読む)
デジタル式変位測定器
【課題】ロータブッシュを適切な姿勢に保持することができ、回転伝達誤差を低減することができるデジタル式変位測定器を提供する。
【解決手段】ロータブッシュ44がステータ42と反対方向へ移動することを規制するロータブッシュ規制手段50を備え、ロータブッシュ規制手段50は、本体に固定された固定部材51と、ロータブッシュ44と固定部材51との間に設けられたロータブッシュ姿勢維持部材52と、を有し、ロータブッシュ姿勢維持部材52は、ロータブッシュ44と当接される二つの第1当接部522と、固定部材51と当接される二つの第2当接部523と、を有し、二つの第1当接部522は、スピンドル2の軸に対して互いに対称の位置に設けられ、二つの第2当接部523は、スピンドル2の軸に対して互いに対称の位置に設けられ、二つの第1当接部522を結ぶ直線と二つの第2当接部523を結ぶ直線とは、互いに略垂直であることを特徴とする。
(もっと読む)
センサ装置
【課題】加速度を検出する検出部としての変位可能な可動電極を有する加速度センサ装置において、検出部の機械的な破損に対して冗長性を持たせることで信頼性の向上が図れるようにする。
【解決手段】検出部1〜4は、検出対象として加速度を検出するものであって、可動部としての可動電極20とこの可動電極20に対向して配置された固定電極30、40とを有するとともに、加速度の印加時には、可動電極20と固定電極30、40との間の容量が変化し、この容量変化が検出部1〜4の信号として出力されるものである。このような検出部1〜4を、1つの半導体チップ10に複数個設けることで、1個の検出部が機械的に破損したとしても、他の検出部からの出力信号により検出を行うことができる。
(もっと読む)
静電容量式位置検出装置
【課題】静電容量式位置検出装置の小型化を実現する。
【解決手段】検知電極2は、紙面左側Lの検知電極2Lと紙面右方向Rの検知電極2Rとを備えて構成されている。検知電極2Lは、右方向Rが櫛歯状に形成されており、櫛歯は右方向Rにいくに従って次第に細くなる。一方の検知電極2Rは、左側Lが櫛歯状に形成されており、櫛歯は左側Lにいくに従って次第に細くなる。検知電極2L及び検知電極2Rは、互いの櫛歯の隙間を介するよう歯合するように配されており、互いの電圧が独立するようにわずかな隙間が介されている。検知電極2L、2Rは、それぞれ静電容量検知回路に接続されている。
(もっと読む)
櫛歯型プローブ、これを備える原子間力顕微鏡装置および変位測定方法
【課題】 製品ばらつきが小さく、製品歩留まりが高い櫛歯型プローブを提供すること。
【解決手段】 櫛歯型プローブ10は、静止部1、可動部2、探針3および支持部4を備えている。櫛歯ドライブ10aは、静止部1の櫛歯状凹凸部と可動部2の櫛歯状凹凸部とが非接触で噛合し、交流電源7によって与えられる静電力により可動部2がZ方向に振動する。櫛歯型プローブ10は、可動部2を励振するのに圧電体層のような機能性薄膜を用いないので、製品歩留まりが高い。可動部2が外力(探針3−試料S間の原子間力)の影響を受けると、櫛歯ドライブ10aのアドミッタンスが変化する。アドミッタンス検出器20によりアドミッタンスを検出し、この検出値から可動部2の変位量を求める。
(もっと読む)
近接度の検出のために電荷移動静電容量センサを保護するための方法およびシステム
複数の検知電極および少なくとも1つの保護電極を有するセンサにおける近接度の検出のために可測キャパシタンスを決定する方法、システムおよび装置が記載される。電荷移動プロセスが、少なくとも2回の実行回数、実行される。前記電荷移動プロセスは、第1のスイッチを使用して前記複数の検知電極の少なくとも1つに所定の電圧を印加するステップと、第2のスイッチを使用して前記少なくとも1つの保護電極に第1の保護電圧を印加するステップと、前記複数の検知電極の前記少なくとも1つと、フィルタキャパシタンスとの間で電荷を再分配するステップと、前記少なくとも1つの保護電極に、前記第1の保護電圧と異なる第2の保護電圧を印加するステップとを有する。近接度の検出のために前記可測キャパシタンスを決定すべく、少なくとも1つの結果を得るために、少なくとも1回の測定回数、前記フィルタキャパシタンス上の電圧が測定される。 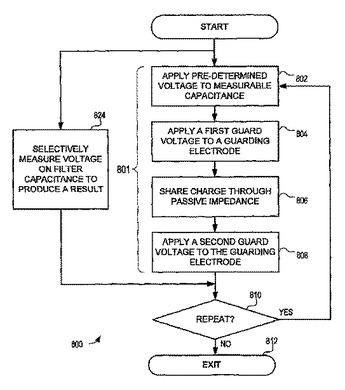 (もっと読む)
(もっと読む)
1 - 20 / 20
[ Back to top ]