
Fターム[2F063LA03]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 電気回路、信号処理 (1,696) | 所定の位相差を有する複数信号波の処理 (34)
Fターム[2F063LA03]に分類される特許
1 - 20 / 34
回転角検出装置、及びトルクセンサ
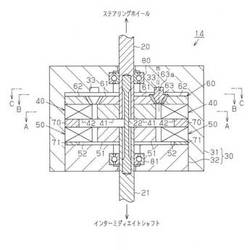
【課題】回転体の多回転の絶対回転角を検出することが可能でありながらも、構造の簡素化を図ることのできるトルクセンサを提供する。
【解決手段】このトルクセンサ14では、第1のレゾルバ40を通じて検出されるインプットシャフト20の回転角度と、第2のレゾルバ50を通じて検出されるロアシャフト21の回転角度との差分値に基づいてステアリングホイールに付与された操舵トルクを演算する。ここでは、インプットシャフト20と一体となって回転する太陽歯車61、磁性体により形成されて太陽歯車61の周囲を公転する遊星歯車63、及び遊星歯車63が噛合される内歯車62により構成される遊星歯車機構60を設ける。そして、第1のレゾルバ40から出力される電圧信号に基づいてインプットシャフト20の回転角及び遊星歯車63の位置を検出し、それらに基づいてステアリングホイールの操舵角を求める。
(もっと読む)
浸炭検知方法

【課題】従来の浸炭検知方法では検知困難な微細な浸炭をも検知可能な浸炭検知方法を提供する。
【解決手段】本発明は、管内面に浸炭の生じていることが既知である浸炭材P0を励磁コイル11及び検出コイル12に内挿させ、励磁コイルに通電する励磁電流の電流値をI(A)、励磁コイルの長さをL(mm)、励磁コイルの巻き数をN、励磁コイルに通電する励磁電流の周波数をF(kHz)とした場合に、検出コイルからの出力信号に基づき浸炭材に生じている浸炭を検知できるように、下記の式(1)で表されるパラメータKの値を決定した後、このパラメータKの値が得られるように励磁コイルの条件を設定した後、被検査対象である管内面における浸炭の有無を検知することを特徴とする。
K=(I・N/L)・F−3/2 ・・・(1)
(もっと読む)
角度検出装置、操舵装置、作業車両、および角度検出方法
【課題】角検出精度を向上させることができる角度検出装置および角度検出方法の提供。
【解決手段】互いに位相差を有するsin信号およびcos信号を出力する角度センサと、sin、cos信号の信号変化率に基づいて、sin、cos信号の一方を選択して角度検出に用いる制御部と、を備え、制御部は、第1、第2信号の一方の信号変化率(電圧勾配)が他方の信号変化率(電圧勾配)よりも小さくなる場合に、選択される信号を前記一方から前記他方へと切り替える。このように2つの信号を選択的に用いることで、変曲点に近く分解能が悪い領域の信号値が角度検出に用いられることが回避されるので、角検出精度を向上させることができる。信号変化率の大小は、sin、cos信号の電圧に基づいて判断することができる。
(もっと読む)
回転角度検出装置
【課題】主に自動車のステアリングの回転角度検出等に用いられる回転角度検出装置に関し、小音化が図れ、確実な回転角度の検出が可能なものを提供することを目的とする。
【解決手段】上面中央に磁石5Aが装着された第一の検出歯車12の、下面中央に磁性体19を設け、第一の検出歯車12を下方へ付勢することによって、第一の検出歯車12の上下方向のがたつきがなくなるため、多少の振動や衝撃が加わっても衝突音の発生を防ぐことができ、小音化が図れ、確実な回転角度の検出が可能な回転角度検出装置を得ることができる。
(もっと読む)
静電型エンコーダおよび内視鏡
【課題】小型光学機器で狭いスペースに組み込まれた複数のレンズを位置または変位を正確に計測できる実用性の高い静電型エンコーダ、これを備えた内視鏡を提供する。
【解決手段】静電型エンコーダは、位置計測方向に配置された電位検出電極13を有する固定子11と、各々が、交流信号TXが供給される電位発生電極17A,17Bを有し、固定子との相対的位置が変化するように設けられた2つの移動子12A,12Bと、2つの移動子のいずれか1つに選択的に交流信号を供給する交流信号供給手段21,25と、固定子の電位検出電極から出力された信号に基づいて2つの移動子のいずれか1つの変位信号を生成する信号処理装置20とを備える。静電型エンコーダは時分割で2つの移動子の変位を独立して計測する。
(もっと読む)
直線移動量検出装置
【課題】直線方向の移動量を直接検出できる高精度で安価な直線移動量検出装置を提供する。
【解決手段】固定部10に対して、所定範囲Dxで直線移動する可動部20の移動量Xを検出する直線移動量検出装置101であって、固定部10または可動部20のいずれか一方に配置され、所定磁界Ba,Bbを発生する磁石20a,20bと、固定部10または可動部20のもう一方に、直線移動するX方向で所定間隔Lを置いて平行に配置される2個のホール素子10a,10bとを有してなり、2個のホール素子10a,10bの出力が、それぞれ、直線移動する所定範囲Dxにおいてsin関数またはcos関数で近似され、所定の位相差αを持つように、所定磁界Ba,Bbと所定間隔Lが設定されてなり、2個のホール素子10a,10bの出力と位相差αを演算して、可動部20の移動量Xを検出する。
(もっと読む)
静電型エンコーダ
【課題】静電気作用で位置情報を検出でき、必要に応じて固定子を可能な限り長尺化できる静電型エンコーダを提供する。
【解決手段】この静電型エンコーダは、誘導電極および電位検出電極を有する固定子31、櫛歯状電極を有し、固定子の上で移動するように設けられた移動子32と、固定子の電位検出電極から出力される信号に基づいて固定子に対する移動子の相対的変位に係る出力信号を生成する信号処理装置50とを備え、固定子の電位検出電極は4相の電極31cを含み、複数の固定子は、4相の電極(A,B,C.D)が規則的な距離位置に配列するように配置され、複数の固定子の各々の間に、4相の電極同士を接続する接続回路部112を備える。
(もっと読む)
回転角度検出装置
【課題】主に自動車のステアリングの回転角度検出等に用いられる回転角度検出装置に関し、安価な構成で、回転角度の確実な検出が可能なものを提供することを目的とする。
【解決手段】第一または第二の検出手段15または16のいずれかを磁石16Aと、直交配置された複数のホール素子16Bと16Cから形成すると共に、制御手段17がこの複数のホール素子16B、16CとAMR素子15Bからの検出信号を用いて、先ず回転体11の概略の回転角度を検出し、この後、AMR素子15Bからの検出信号を用いて、詳細な回転角度を検出することによって、安価なホール素子16Bや16Cを用いることができるため、安価な構成で、回転角度の確実な検出が可能な回転角度検出装置を得ることができる。
(もっと読む)
回転情報算出装置、ステアリング装置及び電動パワーステアリング装置
【課題】3相の磁気検出器の磁気検出信号の異常を検出することが可能であり、異常発生後も、3相中の2相の磁気検出信号が正常な場合に、継続して回転情報の計算を正確に行うことが可能な回転情報算出装置を提供する。
【解決手段】3相の磁気検出信号のサンプリング値a、b、cを取得し、取得したサンプリング値に基づいて、各相に対する回転角度位置を算出する。そして、これら算出した回転角度位置に基づき各相のサンプリング値の異常を検出するとともに、1相のサンプリング値のみに異常が検出されたときは、異常検出フラグを出力すると共に残りの2相のサンプリング値で回転角度位置の算出を行う。2相以上のサンプリング値の異常が検出されたときは、回転情報算出装置の動作を停止する。また、正常な相のサンプリング値に基づいて算出した回転角度位置の平均値を出力用の回転角度位置として算出する。
(もっと読む)
測定装置および測定方法
【課題】 測定対象物由来の物理量を安定して測定することができる測定装置および測定方法を提供する。
【解決手段】 互いの接地が接続された静電容量変換部11,21から、静電容量式変位センサ12,22に、位相の総和が0°となる、同一周波数の正弦波状のキャリア信号を印加して、測定対象物30の厚さを測定する。
(もっと読む)
位置姿勢検出システム及びその検出方法並びに位置姿勢検出装置
【課題】交流磁場を利用して連続的に測定ができ、かつ周波数の設定の自由度が大きく、しかも構成が簡単な位置姿勢検出システムを提供すること。
【解決手段】Xg軸コイル電源群1aとXg軸コイル群1bとからなるXg軸方向磁場発生部1は、指向性を有する交流磁場を少なくとも1つ発生する。Yg軸コイル電源群2aとYg軸コイル群2bとからなるYg軸方向磁場発生部2は、Xg軸方向磁場発生部1とは異なる指向性で、かつXg軸方向磁場発生部1が発生する磁場の周波数とは異なる周波数を有する交流磁場を少なくとも1つ発生する。磁場検出部11は、Xg軸方向磁場発生部1とYg軸方向磁場発生部2から発生する磁場を検出する多軸の磁気センサ10a,10b,10cを有する。演算部4は、Xg軸方向磁場発生部1とYg軸方向磁場発生部2と磁場検出部11の方向関係を特定することで磁場検出部11の位置情報と姿勢情報を算出する。
(もっと読む)
絶対舵角検出装置
【課題】ステアリングホイールの1回転で1周期の絶対舵角を検出して分解能及びリニアリティを保ちながら速やかに絶対舵角を検出する。
【解決手段】車両の操舵装置の絶対舵角を検出する絶対舵角検出装置であって、前記操舵装置の回転に連動して回転するセンサホイール18cと、GMR素子で構成されるブリッジ回路を有する磁気検出器18gと、該磁気検出器18gの回りに配設された着磁部18d,18eと、前記磁気検出器18gから出力される検出信号に基づいて絶対舵角を演算する舵角演算部26とを備え、前記センサホイール18cに前記磁気検出器18g及び着磁部18d,18eの何れか一方を装着すると共に、他方を固定部に装着し、前記磁気検出器18gは前記操舵装置の1回転を1周期とする検出信号を出力するように構成されている。
(もっと読む)
位置検出システム、医療装置誘導システムおよび位置検出方法
【課題】外部からの電力供給により交番磁界を発生する一のマーカと、該交番磁界の周波数と同一またはその近傍に共振周波数を有する共振回路を備えた他のマーカとが共に存在した場合であっても、一のマーカの位置または方向を正確に検出する。
【解決手段】外部からの電力供給により第1の位置算出用周波数を有する第1の交番磁界を発生する第1のマーカ4と、位置算出用周波数と同一の共振周波数を有する磁気誘導コイル5を搭載した第2のマーカ3と、該第2のマーカ3の作動範囲の外部に配置され、第1の位置算出用周波数において磁界を検出する磁界検出部13と、検出された磁界から、第1の位置算出用周波数を有するとともに第1の交番磁界と同一の位相を有する第1の検出磁界成分を抽出する抽出部24と、抽出された第1の検出磁界成分の強度に基づいて第1のマーカ4の位置および方向の少なくとも一方を算出する位置方向解析部22とを備える位置検出システム1を提供する。
(もっと読む)
回転角度検出装置
【課題】ステアリングシャフトの軸方向の厚みを薄くした回転角度検出装置を提供する。
【解決手段】ステアリングシャフトと一体に回転するロータ5の回転を減速する減速機構を、第1平歯車6、第2平歯車7によって構成したので、平歯車は軸方向に比較的薄く形成しやすく、減速機構としてウォームギア等を用いた場合と比較して、回転角度検出装置の薄型化を図ることができる。また第1平歯車6と第2平歯車7との間で、小径歯車6A、7Aと大径歯車6B、7Bの軸方向位置が交互となるように、第1平歯車6および第2平歯車7を配置することにより、回転力の伝達経路が軸方向に広がることがなく、ロータ5の軸方向の厚みの薄い回転角度検出装置1を形成することができる。
(もっと読む)
回転角検出装置
【課題】本発明は、組み付け性や整備性が良好な回転角検出装置の提供を目的とする。
【解決手段】回転体150の回転角を検出する回転角検出装置800であって、径方向に2分割される本体を有する回転角センサ100(200,300等)を備えることを特徴とする。回転角センサは、回転体と共に回転するロータ104と、ステータ106と、コイル(励磁コイル及び検知コイル)108とを備え、回転角検出装置は、ロータの回転に伴って周期的に変化する磁束抵抗を利用して回転体の回転角を検出する。
(もっと読む)
舵角センサ
【課題】 より高精度の舵角センサを提供する。
【解決手段】 ステアリングシャフト103に取り付け、当該ステアリングシャフトの絶対角度を測定するための舵角センサ1であって、当該ステアリングシャフトと連動して可逆回転する主動ギア7と、主動ギアと連動して回転する微信号用ギア19の回転角度を検出する第1検出手段と、主動ギアと連動して回転する粗信号用ギア45gの回転角度を検出する第2検出手段と、を備え、当該第1検出手段は、検出した当該微信号用ギアの回転角度を示す微信号を出力するホール素子及び磁石を含めて構成してあり、当該第2検出手段は、検出した当該粗信号用ギアの回転角度を示す粗信号を出力するポテンショメータを含めて構成してある。そのため、なるべく少ない部品点数で、隣接する検出手段相互の磁束の影響を受けない、より高精度の舵角センサを提供することができる。
(もっと読む)
回転角度検出装置
【課題】装置を大型化することなく広い検出角度範囲を実現できる回転角度検出装置を提供すること。
【解決手段】被検出回転体に固定し共に回転する主回転体と、主回転体に対し所定の回転比で回転する副回転体と、nを2以上の整数として、主回転体の回転に応じ周期的に変化する連続信号を周期数nで出力する主回転検出機構と、mをnより小さく1以上の整数として、副回転体の回転に応じ周期的に変化する連続信号を周期数mで出力する副回転検出機構と、主及び副回転検出機構の出力信号を用い主及び副回転体回転角度を算出する信号処理手段と、主又は副回転体回転角度、主回転体と副回転体との相対回転角度、主及び副回転検出機構出力信号周期に基づいて被検出回転体回転角度を算出する演算処理手段とを備える。
(もっと読む)
位相角検出装置及び該位相角検出装置を用いた内燃機関のバルブタイミング制御装置
【課題】位相変更機構によって制御された中間回転位相を検出して制御精度の向上を図り得る位相角検出装置を提供する。
【解決手段】スプロケット2とカムシャフトとの間に設けられ、ヒステリシスリングに電磁コイルからの電磁力よってブレーキ力を作用させて、前記両者の相対回動位相を変更する。前記スプロケットの外周面の等間隔位置に4つのターゲット突起25を設けると共に、渦ディスク13の外周面の等間隔位置に、第1ターゲット突起に対して20°の遅れた位相に設定された4つの狭幅の第2ターゲット突起26を設けた。また、前記第1、第2ターゲット突起からそれぞれのパルス信号を生成する角度検出センサ27を設け、この両パルス信号の離間長さに応じて少なくとも中間位相角をコントローラ24によって検出するようにした。
(もっと読む)
回転角検出装置
【課題】 片方のレゾルバセンサが故障した場合でも、正常側のレゾルバセンサを用いて絶対角を検出する。
【解決手段】 回転部材を回転可能範囲にわたって回転させたときn回の周期波形信号を出力する第1レゾルバセンサとm(m≠n)回の周期波形信号を出力する第2レゾルバセンサとを備え、両レゾルバセンサの検出した相対角θa,θbの相対角差θabに基づいて回転部材の絶対角度θを算出する。また、回転部材の回転可能範囲を各レゾルバセンサの信号出力周期に応じた分割数で分割して得られる複数の分割領域のうちで、回転部材の回転位置が属する所属分割領域を各レゾルバセンサの信号出力の推移に基づいて導出する。片方のレゾルバセンサが故障したときには、正常側のレゾルバセンサの出力値と所属分割領域とから回転部材の絶対回転角度を算出する。
(もっと読む)
回転角度検出装置
【課題】設計の自由度が高い回転角度検出装置を提供すること。
【解決手段】被検出回転体の回転角度を検出する回転角度検出装置であって、前記被検出回転体に取り付け該被検出回転体と共に回転する主回転体と、前記主回転体に対して所定の回転比で回転する副回転体と、前記主回転体の回転に対応して周期的に変化する信号を出力する主回転検出機構と、前記副回転体の回転に対応して周期的に変化する信号を出力する副回転検出機構と、前記主回転検出機構および前記副回転検出機構が出力する信号の周期を変換し該信号を用いて該変換した周期における前記主回転体および前記副回転体の回転角度を算出する信号処理手段と、前記算出した主回転体または副回転体の回転角度と、前記主回転体と前記副回転体との相対回転角度と、前記変換した周期とに基づいて前記被検出回転体の回転角度を算出する演算処理手段と、を備える。
(もっと読む)
1 - 20 / 34
[ Back to top ]