
Fターム[2F063LA12]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 電気回路、信号処理 (1,696) | 微分回路 (15)
Fターム[2F063LA12]に分類される特許
1 - 15 / 15
アクチュエータの当接検出方法、一定力発生機構及び発生力推定方法
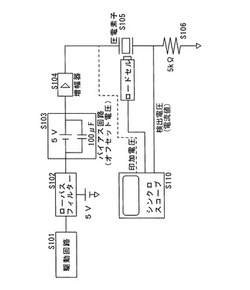
【課題】対象物にアクチュエータが当接した瞬間をロードセルを用いずに、電流の値から検出する方法を提供する。
【解決手段】積層圧電素子単体又は積層圧電素子S105と変位拡大機構の組み合わせよりなる圧電アクチュエータと、その圧電アクチュエータから所定の隙間をあけ、圧電アクチュエータに電圧を印加したときに圧電アクチュエータが当接するように配置された対象物と、圧電アクチュエータに電圧を供給する駆動回路S101と、その駆動回路から圧電アクチュエータに流入する電流の検出手段S106と、を有し、駆動回路が連続的に変化する電圧を供給するとき、流入する電流値の変化により、圧電アクチュエータが対象物に当接したことを検出することにする。
(もっと読む)
測定装置

【課題】非接触距離センサによって棒体との間隔の変化を検出しこれに基づいて棒体の作動状態を測定する測定装置を提供する。
【解決手段】軸方向へ移動する棒体の表面に対して非接触状態で対向配置されて該表面との間の距離の変化を検出する非接触距離センサの検出信号に基づいて棒体の作動状態を測定する。係る構成によれば、上記距離の変化状態から、棒体の移動開始・停止位置とか、移動時間・時期を正確に判断することができ、延いては、棒体の軸方向への移動量や移動速度を取得できる。
(もっと読む)
回転測定装置、シート搬送装置、原稿読取装置、及び画像形成装置
【課題】回転体の軸線直交方向への変位量を測定するための専用のセンサーを設けることなく、回転体の回転量と軸線直交方向への変位量とを測定する。
【解決手段】回転体の回転軸部材と同期して自らも回転する被検部材と、これの特性を検知するセンサーとの組合せとして、被検部材が1回転する毎に、センサーが1周期分の正弦波を出力し、且つ被検部材が回転体とともに軸線直交方向に移動するのに伴って、センサーが正弦波の振幅を変化させるもの、を用いた。かかる組合せの一例としては、図1に示す被検部材510と距離センサー(511、512)との組合せを挙げることができる。このような組合せのセンサーから出力される正弦波に基づいて回転体の回転量を算出しつつ、正弦波の振幅の変化量に基づいて回転体の軸線直交方向の変位量を算出するようにした。
(もっと読む)
多層配線板の孔あけ加工装置
【課題】導体で形成された配線パターンが積層されてなる多層配線板において、前記多層配線板に精度孔あけ加工を行う。
【解決手段】多層配線板の微小領域に交番磁場を印加し計測対象パターン2で誘起された起電力の電圧値を検出する計測部5と、多層配線板1に孔あけ加工を行う孔あけ加工部6と、孔あけ加工部6を制御する制御部Contを備え、制御部Contが電圧値及び位置データより取得した多層配線板1の位置情報をもとに、孔あけ位置を決定し、孔あけ加工部6を駆動して多層配線板1に孔あけ加工を行う多層配線板の孔あけ加工装置A。
(もっと読む)
車両用舵角検出装置及びこれを使用した電動パワーステアリング装置
【課題】簡易な演算処理で、長時間の旋回や片方の修正舵などによる誤推定を抑制することができる車両用舵角検出装置及びこれを使用した電動パワーステアリング装置を提供する。
【解決手段】車両のステアリング機構の相対舵角θrを検出する相対舵角検出手段14,31と、既知の車両全舵角範囲θtを記憶する全舵角範囲記憶手段24と、該全舵角範囲記憶手段24に記憶された前記車両全舵角範囲θtと、前記相対舵角検出手段31で検出した前記相対舵角θrとに基づいて前記ステアリング機構の絶対舵角推定値θaを演算する絶対舵角推定値演算手段26とを備えている。
(もっと読む)
ブーム長検出装置
【課題】検出コードの断線の有無を知ることができるブーム長検出装置を提供する。
【解決手段】このブーム長検出装置1は、検出コード3が繰り出されている長さに基づいて多段伸縮ブームの伸縮した長さを求めるコントローラ5を備えている。そして、このコントローラ5は、検出コード3が検出器本体4に巻回される速さに基づいて、検出コード3が所定以上の速さで巻回されたときに、検出コード3が断線したと判定するようになっている。
(もっと読む)
車両用側突検出装置及びそれを備えた車両用乗員保護システム
【課題】広範囲の衝突検出を可能とし、省スペース化、および、配置の容易化を図ることができる車両用側突検出装置を提供する。
【解決手段】側面ドア1は、外板11と、内板12と、ステー31と、位置センサ32と、補強部材13を備えている。内板12と外板11との間はドアガラス30とドアガラス30の下辺に取り付けられたステー31の移動空間である。コイル2は補強部材13に配置され、内板12側に磁界を発生している。コイル2は磁性体である内板12を内板側部材として、内板12との離隔距離の変化を磁束の変化として検出する。そして、この検出値に基づいて判定手段は、位置センサ32が検出したステーの車両上下方向(垂直方向)の位置により判定方法を選択して、車両と物体とが衝突したことを判定する。
(もっと読む)
回転検出装置の信号処理回路
【課題】検出対象の実質的な回転方向を含む回転情報をより正確に生成出力することのできる回転検出装置の信号処理装置を提供する。
【解決手段】出力部8は、クランクロータ1の回転方向に逆転が無かった旨が2回数連続して判定される場合、これら一連の判定のうちの最初の判定時直前の第1判定タイミングにおけるクランクロータ1の回転方向に係る判定結果を用いて第3パルス信号Scを生成出力する。また、出力部8は、クランクロータ1の回転方向に逆転が有った旨が判定される場合、この逆転が有った旨が判定されてからクランクロータ1の回転方向に逆転が無かった旨が2回連続して判定されるまでにおいては、これら一連の判定のうちの最初の逆転が有った旨の判定時直前における第3パルス信号Scの信号レベルを継続して出力する
(もっと読む)
回転センサ
【課題】経年変化の影響を抑制しつつ、マグネットと回転ディスクとのギャップ管理をより簡単にできる回転センサを提供する。
【解決手段】回転センサ8は、スプール4に一体回転可能に支持されかつN極マグネット14NとS極マグネット14Sとが交互に隙間なく配設された多数のマグネット14を備えた回転ディスク10と、マグネット14を検出するホール素子12とからなる。ホール素子12は第1ホール素子12aと第2ホール素子12bの2個、それぞれ所定位置に来た対応するマグネット14に対向するように円環状のマグネット14の円周方向に沿って所定間隔を置いてブラケット11に取り付けられている。
(もっと読む)
絶対変位・速度計測用センサ
【課題】 建物の振動制御に適用できるような低振動数から測定でき、小型でも大地震の変位測定にも適用でき、しかもセンサの設置状況によって測定信号に直流分が生じない絶対変位・速度計測用センサを提供すること。
【解決手段】 本発明の絶対変位・速度計測用センサ10は、筐体1に内蔵され、ばね3及びダンパ4によって支えられた重り2と、それを計測範囲内で不動にするように作動するアクチュエータ6と、重り2と筐体1との間の速度を検出する相対速度センサ5と、重りの動きを制御するコントローラとからなる。
(もっと読む)
絶対舵角検出装置
【課題】ステアリングホイールの1回転で1周期の絶対舵角を検出して分解能及びリニアリティを保ちながら速やかに絶対舵角を検出する。
【解決手段】車両の操舵装置の絶対舵角を検出する絶対舵角検出装置であって、前記操舵装置の回転に連動して回転するセンサホイール18cと、GMR素子で構成されるブリッジ回路を有する磁気検出器18gと、該磁気検出器18gの回りに配設された着磁部18d,18eと、前記磁気検出器18gから出力される検出信号に基づいて絶対舵角を演算する舵角演算部26とを備え、前記センサホイール18cに前記磁気検出器18g及び着磁部18d,18eの何れか一方を装着すると共に、他方を固定部に装着し、前記磁気検出器18gは前記操舵装置の1回転を1周期とする検出信号を出力するように構成されている。
(もっと読む)
信号処理装置
【課題】センサ電極の静電容量の変化を検出する静電容量検出装置を組込んシステムに、外乱を遮断しつつ、センサ電極に長く触れた場合を検出させる。
【解決手段】人が触れるとセンサ電極11の静電容量が変化する。センサ電極11に接続された静電容量検出部12は、センサ電極11の静電容量に相当する出力信号12を出力する。ハイパスフィルタ21は、出力信号S12における周囲温度等の外乱要因を遮断する。第1検出部22は、人がセンサ電極11に触れたタイミングを検出し、第2検出部23はセンサ電極11から人が離れたことを検出する。計測部24は、第1検出部22及び第2検出部23で検出したタイミングの時間差を計測し、出力部25が時間差の判定を行う。
(もっと読む)
センサ、及び位置及び速度を測定するための方法
本発明は、少なくとも一つの測定方向に沿って移動する部分の位置及び速度を検出するセンサに関し、そのセンサは、観測期間Tobs中のターゲットの変位モデルに基づいて位置及び速度の推定値を提供するように適合された推定器(38)を有し、その変位モデルは、観測期間Tobsに含まれる時刻tにおけるターゲットの位置を、少なくとも推定されるべき位置及び速度に関連付ける。 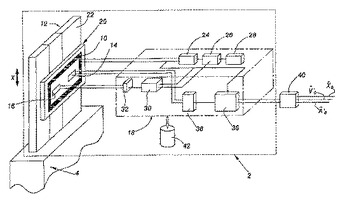 (もっと読む)
(もっと読む)
回転角検出装置
【課題】回転角センサの出力を低回転角領域で増幅して用いる回転角検出装置において、該低回転領域でのセンサ出力−回転角変換特性を高精度に学習する。
【解決手段】ストッパで規制される最小回転角θ1と最大回転角θ2における回転角センサからの増幅しない出力(等倍出力)V1,V2から、第1変換特性におけるゲインdV/dθを学習した後、増幅した出力が選択される領域での小側および大側の回転角θmin、θmaxに対応する第1変換特性における出力Vmin、Vmax、同じく第2変換特性における出力Vnmin、Vnmaxに基づいて、第2変換特性におけるゲインdnV/dnθ{=(Vnmax−Vnmin)/(θmax−θmin)}を学習する構成とした。
(もっと読む)
可動体用異物検出装置
【課題】可動体の移動方向にある異物を安価にかつ確実に検出する。
【解決手段】スライドドア3の閉側縁部に上下に並べて2つの物体検出センサ4・5を設け、各センサのセンサ出力を判別用差分回路10に入力し、両センサ出力の差分となる判別用差分回路の出力Vcを判定回路11に入力する。判定回路11では出力Vcが閾値Vd以上になったら異物があると判定する。これにより、距離センサを設けることなく可動体の移動方向にある異物を識別することができ、可動体に用いられる異物検出装置を簡単な構成により低廉化し得る。
(もっと読む)
1 - 15 / 15
[ Back to top ]