
Fターム[2F063LA16]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 電気回路、信号処理 (1,696) | 平均値算出 (48)
Fターム[2F063LA16]に分類される特許
1 - 20 / 48
移動体システムと移動体の位置検出方法
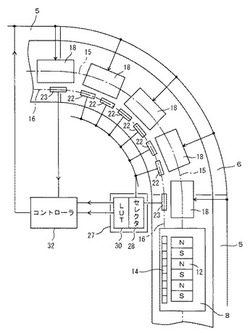
【課題】
カーブ区間で移動体の位置を正確に求める。
【構成】
移動体に被検出用の磁石の列が設けられ、移動体の走行方向に沿っての検出範囲の長さが磁石の列の長さよりも短い磁気式変位センサが、移動体が走行する軌道の少なくともカーブ区間に複数個間隔を空けて配置されている。移動体の位置に応じて、複数個の変位センサを順番に切り換えるように選択することにより、移動体の位置を求める統合ユニットが設けられている。
(もっと読む)
表面形状測定用触針式段差計及び該段差計における測定精度の改善方法

【課題】表面形状への追随性が良く、かつ、変位雑音が小さい表面形状測定用触針式段差計及び該段差計における測定精度の改善方法を提供する。
【解決手段】変位センサ20の磁性体コアに固有雑音の小さい強磁性体のコアを使用し、低雑音の差動トランスとして形成し、低雑音の差動トランスの出力を、低雑音のデジタルロックインアンプで計測し、変位の測定結果からセンサ20の固有振動に起因する雑音を、低域通過フィルターを用いて移動平均法で除去し、低域通過フィルターの遮断周波数を通常の15Hz程度よりも高くする。
(もっと読む)
角度検出装置、操舵装置、作業車両、および角度検出方法
【課題】角検出精度を向上させることができる角度検出装置および角度検出方法の提供。
【解決手段】互いに位相差を有するsin信号およびcos信号を出力する角度センサと、sin、cos信号の信号変化率に基づいて、sin、cos信号の一方を選択して角度検出に用いる制御部と、を備え、制御部は、第1、第2信号の一方の信号変化率(電圧勾配)が他方の信号変化率(電圧勾配)よりも小さくなる場合に、選択される信号を前記一方から前記他方へと切り替える。このように2つの信号を選択的に用いることで、変曲点に近く分解能が悪い領域の信号値が角度検出に用いられることが回避されるので、角検出精度を向上させることができる。信号変化率の大小は、sin、cos信号の電圧に基づいて判断することができる。
(もっと読む)
光偏向装置
【課題】2軸に傾動可能な光偏向装置において、それぞれの軸の周りの傾動角度を正確に検出することが可能が技術を提供する。
【解決手段】本出願の光偏向装置は、基板に対して第1傾動軸および第2傾動軸周りに傾動可能な傾動部と、前記傾動部に固定されているミラーと、前記傾動部を前記基板に対して第1傾動軸および第2傾動軸周りに傾動させるアクチュエータを備えている。その光偏向装置は、前記傾動部に固定されている磁束源と、前記基板に固定されており、前記磁束源が発生させる磁束密度を検出する第1、第2、第3および第4磁気センサを備えている。その光偏向装置では、前記第1、第2、第3および第4磁気センサが、傾動部の第1傾動軸周りの傾動および第2傾動軸周りの傾動に対して、それぞれ異なる増減特性となる位置関係で配置されている。
(もっと読む)
粗さ測定装置
【課題】非接触且つ非光学方式の簡便な構成で、大きな凹凸で構成された非常に粗い表面の粗さを、測定対象表面の湿気の影響を受けることなく、かつ短時間で測定することができる粗さ測定装置を提供する。
【解決手段】
被測定物体2の表面粗さを測定する粗さ測定装置1aにおいて、被測定物体2の表面上の所定領域を測定エリアとすると共に、測定エリア内の表面粗さに対応する信号を出力する粗さセンサと、粗さセンサの出力に基づいて、測定エリアの表面粗さの測定値を出力する粗さ検出部と、を備えるように構成する。このように構成された粗さ測定装置1aは、被測定物体2の表面粗さを非接触且つ非光学方式で測定することができる。
(もっと読む)
回転角検出装置、トルク検出装置、及び電動パワーステアリング装置
【課題】高い角度分解能を確保しつつ、一の回転角センサが出力するセンサ信号に基づいて検出対象の機械的な一回転を一周期とする機械角の検出が可能な回転角検出装置を提供すること。
【解決手段】トルクセンサを構成する各回転角センサは、3倍角成分及び7倍角成分の合成波形を有するとともに回転角に応じた信号変化の位相が均等にずれた三相のセンサ信号を出力する。一方、各回転角検出部は、各センサ値a,b,cから該各センサ値a,b,cの平均値を減算して各センサ値a,b,cに含まれる7倍角成分の値を抽出することにより7倍の軸倍角を有する電気角θelを検出する。そして、その電気角θelに基づき推定される7個の機械角推定値θab_e(θab_e1〜θab_e7)を3倍角成分に換算して上記各センサ値a,b,cの平均値と比較することにより、検出対象であるステアリングシャフトの機械角θabを検出する。
(もっと読む)
回転角度検出装置
【課題】誤差要因の影響を抑制し、回転角度の検出精度をより安定的に維持することができる回転角度検出装置を提供する。
【解決手段】最終的な絶対回転角度θrは、第1の仮絶対回転角度θabの理想値である。このため、絶対回転角度θrと第1の仮絶対回転角度θabとの差の値である誤差値Δθabは、第1及び第2の従動歯車の回転角度α,βの相対誤差でもある。そこで、誤差値Δθabに基づき算出される補正値εを第1の仮絶対回転角度θabに加味し、これを使用して周期数iを演算するようにした。補正後の第1の仮絶対回転角度θabは前記相対誤差の影響が吸収されたものとなる。すなわち、第1及び第2の従動歯車の回転角度α,βの相対誤差が許容範囲を超える場合であれ、当該相対誤差が存在しない状態に近似した状態で周期数iが演算される。
(もっと読む)
回転角度検出装置の初期設定方法
【課題】初期設定作業の簡素化を図りつつ、しかも当該作業精度に依存することなく検出誤差を低減することができる回転角度検出装置の初期設定方法を提供する。
【解決手段】初期設定時には、まず主動歯車が正方向へ任意の角度だけ回転される。このときサンプリングされる第1及び第2の従動歯車の回転角度αn,βnと、これらに基づき算出される主動歯車の仮回転角度θLから逆算される第1及び第2の従動歯車の回転角度αL,βLとの関係に基づき、2つの回帰直線Y1,Y2が求められる。同様にして、主動歯車が逆方向へ任意の角度だけ回転されたときの2つの回帰直線Y3,Y4が求められる。つぎに、各回帰直線Y1〜Y4と、サンプリングされる第1及び第2の従動歯車の各回転角度αn,βnとの差分の平均値が、実際にサンプリングされる第1及び第2の従動歯車の回転角度に加算される補正データとして初期設定される。
(もっと読む)
パンタグラフの摺り板の局所的凹部検知方法及び装置
【課題】 パンタグラフが通過するときのトロリ線の計測を介して、パンタグラフにおける摺り板の損傷凹部を検知する局所的凹部検知方法及び装置を提供する。
【解決手段】 トロリ線1をジグザグに支持する支柱2の近傍または支柱径間に設けた変位測定装置30により、パンタグラフ23が通過するときのトロリ線1の測定位置における線路に垂直な水平方向の変位、さらに正確には線路に垂直な面内における線路面に平行な方向の変位を測定し、測定された変位に基づく値が所定の閾値を超えたことをもって前記トロリ線1の下の軌道を通過した電車のパンタグラフ23の摺り板25に損傷凹部などの局所的凹部が生じていると判定する。
(もっと読む)
回転角検出装置およびこれを備えたパワーステアリング装置
【課題】シャフトが径方向にずれた場合に検出誤差を抑制することのできる回転角検出装置およびこれを備えたパワーステアリング装置を提供する。
【解決手段】インプットシャフト41に一体に設けられ、インプットシャフト41の周方向に所定の間隔をもってN極およびS極が着磁された磁性部材44と、磁性部材44に対向配置されてN極およびS極による磁界の変化を検出するMRセンサ45とを備えた回転角センサ50において、MRセンサ45をインプットシャフト41の周方向に異なる位置に複数配置する。
(もっと読む)
変位計用アンプ装置
【課題】 差動トランス式変位計と歪みゲージ式変位計のいずれを使用する場合であっても、共通して使用することが可能な変位計用アンプ装置を提供する。
【解決手段】 変位計が差動トランス式変位計であるか歪みゲージ式変位計であるかの種別を記憶した不揮発性記憶素子と、変位計の種別に基づいて変位計から受信した出力信号に対するゲインの値を変更する計装アンプ55と、変位計の種別に基づいて変位計から受信した出力信号に対する検波の方法を変更する相関係数計算部58と、変位計の種別に基づいて変位計に送信する電源電圧の波形を変更する波形メモリ53および波形制御部54とを備える。
(もっと読む)
差動ペアを備えた静電容量感知システム
2つ以上の静電容量センサ(30a、30b)と、静電容量センサにエネルギを与える1つ以上のAC電力源(306a、306b)と、静電容量センサからの信号を処理する信号処理回路とを具備する、静電容量感知システム。センサは、ペアで配置されている。1つ以上のAC電力源は、センサのペアのうちの第1のセンサに、センサのペアのうちの第2のセンサの電流又は電圧に対して位相が180度ずれている交流電流(307)又は電圧で、エネルギを与えるように構成されている。センサのペアは、1つの測定距離値に対する測定ユニットを備えている。信号処理回路は、ペアのうちの各センサから出力信号を受信し、ペアのセンサとターゲット(9)との間の平均の距離に関係する測定値を生成する。 (もっと読む)
測定値のサブセットを識別する方法および装置、対象物の位置を特定する方法およびシステム、これらの方法のための記録媒体
磁気擾乱素子によって擾乱されている測定値を含む測定値サブセットを識別する方法であって、a)磁界を放射するステップ、およびN個の実際の測定値のセットを求めるために、N組の単軸磁界源/単軸磁気変換器の対を用いてこれらの磁界を測定するステップ(70)と、b)N個の測定値の中のサブセットMiに基づいて、対象物の位置の推定値Piを算出するステップ(72)と、c)推定位置Piと、対象物の位置をN個の測定値から成るセットに関連付ける少なくとも1つの直接モデルとに基づいて、N個の測定値を推定するステップ(74)と、d)ステップc)中に推定された測定値をステップa)中に求められた実際の測定値と比較することによって、この測定値サブセットMiが擾乱測定値を含むか否かを判定するステップ(76)とを有する。 (もっと読む)
金属物の形状判定方法
【課題】金属物の形状を判別して検知できる金属物の形状判定方法を提供する。
【解決手段】センサーコイル5,6を用いて、被検出物2中に混入した金属物を検知する。センサーコイル5,6から出力される検出信号を信号処理解析して、金属物の形状を判定する。解析のとき、被検出物2がセンサーコイル5,6に入力するタイミングから、センサーコイル5,6を通過して出ていくタイミングまでの信号を規格化して規格化信号にし、規格化信号の中に、3以上のピーク値があるとき、針であると判定する。規格化信号の中に、2個のピーク値のみがあるとき、鉄粉であると判定する。
(もっと読む)
回転角検出装置、モータ制御装置、および電動パワーステアリング装置
【課題】モータ等の回転機におけるロータの回転速度が変化しても現時点のロータ回転角を正確に推定できる回転角検出装置を提供する。
【解決手段】ホールセンサによるロータ回転角の離散的な検出結果から現時点のロータ回転角を示す回転角推定値θreを次のようにして求める。ロータ回転角が検出される毎にその前の検出時点ti-1から今回の検出時点tiまでの期間での平均的な角速度を示す角速度算出値ωc(i)を求める(i=0,1,2,…)。ロータ回転の加減速を考慮すべく、現時点の直前の検出時点tkで得られた角速度算出値ωc(k)を、その角速度算出値ωc(k)と更に前の検出時点tk-1で得られた角速度算出値ωc(k−1)との比に応じて補正することにより、角速度推定値ωeを求める。当該直前の検出時点tkから次の検出時点tk+1まで、この角速度推定値ωeを用いて回転角推定値θreを算出する。
(もっと読む)
膜厚計測装置及び方法
【課題】油膜の膜厚をより高い精度で計測することができる膜厚計測装置及び方法を提供する。
【解決手段】膜厚計測装置10は、シリンダライナSのピストンリング摺動面Lに埋設された静電容量センサ11とピストンリングRとの隙間に形成された潤滑油の油膜の静電容量を計測する静電容量計測部13と、ピストンリングRが静電容量センサ11の埋設箇所を通過する直前の複数点の計測値及び直後の複数点の計測値の少なくとも一方の計測値の平均値を求め、ピストンリングRが静電容量センサ11の埋設箇所を通過する際に得られる計測値からその平均値を差し引いて得られる補正計測値に基づいて油膜の膜厚を求める膜厚演算部15とを備える。
(もっと読む)
ステアリング角度センサ
【課題】 ステアリングコラムのハウジングに取り付けることができる、対費用効果に優れたセンサを提供する。
【解決手段】 定置構成要素に関して回転する回転自在構成要素の回転量を決定するための装置は、第1端が回転自在構成要素に固定され、第2端が定置構成要素に固定されたケーブルを含む。ケーブルは感知エレメントを支持し、回転自在構成要素が定置構成要素に関して回転するとき、巻き付けられたり巻き解かれたりするように形成されている。感知エレメントは、ケーブルの長さに沿って延び、ケーブルの巻き付け又は巻き解きに応じて撓むように形成されている。感知エレメントの抵抗は、感知エレメントの撓みに応じて変化する。評価回路が感知エレメントに接続されており、抵抗に対して所定の関係を持つ値を決定し、この値に基づいて回転量を決定する。
(もっと読む)
媒体厚検出装置及び画像形成装置
【課題】媒体の厚さを検出する期間が短い場合でも、厚さの検出精度を向上させること。
【解決手段】媒体Sに接触している接触回転体3の1回転以上の期間における接触回転体3の厚さ方向の移動量の履歴情報に基づいて、媒体有り移動量V2を演算する媒体有り移動量演算手段と、媒体Sに接触していない接触回転体3の1回転未満の期間T1における接触回転体3の厚さ方向の移動量の履歴情報と、媒体有り時の1回転以上の期間T2における履歴情報に基づいて導出された補正情報と、に基づいて、媒体無し移動量V1を演算する媒体無し移動量演算手段と、媒体有り移動量V2と媒体無し移動量V1と、に基づいて、媒体の厚さを検知する媒体厚検知手段と、を備えた媒体厚検出装置。
(もっと読む)
エンコーダおよび信号処理方法
【課題】磁気検出素子の出力にバラツキがある場合でも、検出精度を向上させ、高精度を有するエンコーダを提供する。
【解決手段】エンコーダが、第1の絶対位置エンコーダから入力された第1の検出信号に基づいて入力軸の角度位置を示す第1の位置データを検出する第1の位置データ検出回路と、第2の絶対位置エンコーダから入力された第2の検出信号に基づいて出力軸の角度位置を示す第2の位置データを検出する第2の位置データ検出回路と、第1の位置データと第2の位置データとを合成して、入力軸の多回転量とともに1回転内の角度位置を示す合成位置データを生成する位置データ合成回路と、を備え、前記第1の絶対位置エンコーダまたは前記第2の絶対位置エンコーダは、前記入力軸又は前記出力軸の回転にともない回転する回転子と前記回転子の周囲に配置される複数の磁気検出素子とを有する磁気式エンコーダである。
(もっと読む)
建造物メッキ膜厚測定方法
【課題】鉄塔等の建造物のメッキ膜厚を適切に測定することで測定値と実態とのずれをなくして、塗装作業の平準化を図る上で適切な塗装計画を策定することが可能な建造物メッキ膜厚測定方法を提供する。
【解決手段】建造物に使用されるナット3の測定面(側面3a)を研磨する下地処理工程と、ナット3の測定面の所定部位に対して電磁膜厚計により所定回数の膜厚測定を行い、所定の上限値を超える測定値を除去して有効測定値を選別する有効測定値選別工程と、有効測定値選別工程で選別された有効測定値をナットのねじの呼び、及び、ナットの解体の有無に応じて補正する測定値補正工程と、測定値補正行程で補正された有効測定値の平均値を算出する測定値平均化処理工程とを具備する。
(もっと読む)
1 - 20 / 48
[ Back to top ]