
Fターム[2F063LA19]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 電気回路、信号処理 (1,696) | A−D変換 (148)
Fターム[2F063LA19]に分類される特許
21 - 40 / 148
密封容器検査方法及び密封容器検査装置
【課題】 隣接する不良品容器の存在により良品容器のセンサ出力値が変化したときでも、密封状態の良否判定を正確に行う。
【解決手段】 カートンケースに収納されたカップ型容器の蓋部のうち、該蓋部における中心部と、この中心部から所定距離離れた二点とにおいて、該蓋部との距離を測定する測定手段23と、二点の位置の平均値と中心部の位置との差を判定値として算出し、この判定値が所定範囲を逸脱していると、該カップ型容器が不良品であると判定する判定手段27とを備え、二点のうちの一点と中心部との間の距離を抽出点距離とし、この抽出点距離が、良品のカップ型容器と不良品のカップ型容器が隣同士で配置されているときに、良品のカップ型容器について算出された判定値が所定範囲を逸脱しない値を示すように設定された距離である。
(もっと読む)
位置検出装置

【課題】電源電圧が低下した場合の挙動仕様を共通にすることの可能な位置検出装置を提供する。
【解決手段】ホール素子の電圧信号を処理する信号処理回路から出力された電圧信号がバッファアンプ65によって緩衝増幅され、出力端子41を通じてECUに伝送される。電流検出回路67は出力端子41を流れる電流の向きを検出する。電源電圧検出回路68はホールICに供給される電源電圧の低下を検出する。電源電圧が低下したことを示す信号が電源電圧検出回路68から出力されると、電圧切替回路69は、出力端子41からECUに出力される電圧信号を電流検出回路67の検出した電流の向きに応じて高電圧側又は低電圧側にする。これにより、ECUの受け回路に設けられたプルアップ抵抗又はプルダウン抵抗に対応する電圧信号がECUに出力される。
(もっと読む)
対象物の構成金属および対象物までの距離を検知するセンサおよび方法
【課題】本願発明は、対象物を構成する金属ならびに検知コイルから対象物までの距離を極めて短時間で検知できる材質測距センサを提供する。
【解決手段】本願発明に係る材質測距センサは、LCR共振回路部と、これに高周波電流を供給するための駆動部と、LCR共振回路部の駆動電圧および駆動電流を検出する駆動電圧検出手段および駆動電流検出手段と、駆動電圧および駆動電流からn次駆動電圧およびn次駆動電流を抽出するn次成分抽出手段と、n次駆動電圧およびn次駆動電流から共振周波数および負荷抵抗を算出する制御部と、複数の既知の金属、および複数の既知の対象物までの距離について事前に検知した共振周波数と負荷抵抗との関係を示す検知マップを記憶する記憶部とを備え、制御部は、算出された共振周波数および負荷抵抗と、記憶されたものとを比較して、対象物の構成金属または対象物までの距離を検知するものである。
(もっと読む)
位置検出装置
【課題】広い検出範囲でありながら、高い測定精度をもち安価で小型の位置検出装置を提供する。
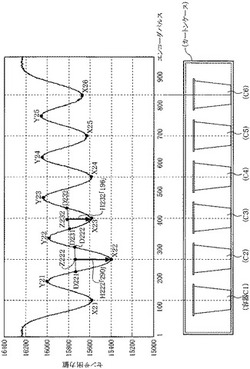
【解決手段】磁石3の長さより短い配置間隔で磁気検知器5を複数個並べ、検出範囲を複数の磁気検知器5で分割して測定する。これにより任意の検出範囲の位置検出装置が製作でき、検出範囲が長い場合でも磁石3が小型にでき、さらに位置検出装置の全長を短くできる。また、磁石3の着磁方向を移動方向に異極とし、移動方向に垂直な方向の磁力線を検出対象とすることで、磁力線の強さが磁石の全長方向に広い範囲でなだらかに変化するので、検出精度の高い位置検出装置が実現できる。さらに検出範囲を複数の磁気検知器5で分割して測定するので、位置測定の分解能を高くでき、高精度の測定が可能となる。
(もっと読む)
振幅変調装置の異常診断装置
【課題】レゾルバ20の異常を検出できないおそれがあること。
【解決手段】回転子10aの回転角度θの情報を含む一対の検出信号(A相被変調波Sa,B相被変調波Sb)は、2次側コイル24,26の電圧を差動増幅回路30,32に入力した出力信号として生成される。差動増幅回路30,32は、2次側コイル24,26との接続が途絶えると、出力信号を固定値とする。A/D変換器34,36は、A相被変調波Sa,B相被変調波Sbを、励磁信号Scの周期「2π/ω」とは相違するサンプリング周期Tでサンプリングする。サンプリング信号SA,SBの変動量に基づき異常の有無を診断する。
(もっと読む)
回転角度検出装置
【課題】誤差要因の影響を抑制し、回転角度の検出精度をより安定的に維持することができる回転角度検出装置を提供する。
【解決手段】最終的な絶対回転角度θrは、第1の仮絶対回転角度θabの理想値である。このため、絶対回転角度θrと第1の仮絶対回転角度θabとの差の値である誤差値Δθabは、第1及び第2の従動歯車の回転角度α,βの相対誤差でもある。そこで、誤差値Δθabに基づき算出される補正値εを第1の仮絶対回転角度θabに加味し、これを使用して周期数iを演算するようにした。補正後の第1の仮絶対回転角度θabは前記相対誤差の影響が吸収されたものとなる。すなわち、第1及び第2の従動歯車の回転角度α,βの相対誤差が許容範囲を超える場合であれ、当該相対誤差が存在しない状態に近似した状態で周期数iが演算される。
(もっと読む)
回転角・トルクセンサ
【課題】必要な部品点数が少なく、車両の省スペース化を実現できる回転角・トルクセンサを提供する。
【解決手段】回転角・トルクセンサ100において、それぞれ回転軸に対して固定された第1及び第2の磁気センサ10,11と、第1のシャフト4の回転に応じて、第1の磁気センサ10の位置に第1周期数の周期的な第1の磁界を生成する磁石ローター1と、第2のシャフト5の回転に応じて、第2の磁気センサ11の位置に第2周期数の周期的な第1の磁界を生成する磁石ローター2と、第1及び第2の磁気センサ10,11の出力に基づいて第1及び第2のシャフト4,5それぞれの機械角を算出するとともに、算出した第1及び第2のシャフトそれぞれの機械角に基づいて第1のシャフト5にかかるトルクを算出する演算回路30とを備え、第1周期数と第2周期数とは互いに異なることを特徴とする。
(もっと読む)
センサ出力補正回路及び補正方法
【課題】固体高分子電解質を用いた曲率センサに付与される曲率と曲率センサからの出力電圧との間の線形性を保持すること。
【解決手段】一対の電極と、その間に形成された固体高分子電解質層と、を備えたセンサ200が、付与された曲率に応じて出力する出力電圧を補正する補正回路100であって、出力電圧の変化量を監視する監視回路102と、変化量が所定の基準値よりも小さい場合、センサが静止状態であると判定し、目標電圧を設定する状態判定回路103と、静止状態であると判定された場合、センサ200に対し出力電圧が目標電圧に近づく方向に出力電圧と目標電圧とのずれに応じた量の電荷を注入する補正電流生成回路104と、を備えるセンサ出力補正回路。
(もっと読む)
チェンジレバーの位置検出装置および自動変速機の変速制御装置
【課題】ホール素子を用いてチェンジレバーのセレクト方向の位置およびシフト方向の位置を検出しつつ、チェンジレバーユニット内でシフトパターンの判定を行わない。
【解決手段】ホール素子素子2はチェンジレバーのセレクト方向の位置に応じたセレクト位置電圧信号およびシフト方向の位置に応じたシフト位置電圧信号を出力する。TCU4の判定部5は、ホール素子からのセレクト位置電圧信号およびシフト位置電圧信号に基づいてマップ6aに設定されたセレクト位置電圧信号の領域および電気的シフト位置電圧信号の領域からチェンジレバーの位置を判定する。そして、TCU4の変速制御信号出力部7は、判定部5からのチェンジレバーの位置に基づいて自動変速機3の変速制御信号を出力する。
(もっと読む)
インピーダンス計測センサ、インピーダンス計測装置およびインピーダンス計測方法
【課題】局所的な液体の存在量を高精度の空間分布で計測するとともに、液体が薄い液膜の場合でも適切に高精度に計測することができるインピーダンス計測センサを提供する。
【解決手段】一方の電極である励起電極21及び他方の電極である計測電極22からなる電極対25の複数個と、励起電極21の基準電位と同じ電位に保持したグランド領域23と、励起電極21、計測電極22及びグランド領域23間を電気的に絶縁する絶縁部24とを有するインピーダンス計測センサであって、絶縁部24は、周囲をグランド領域23に囲まれてそれぞれ独立した絶縁領域を形成しており、各電極対25のうち同一電極対における励起電極21と計測電極22との間には絶縁領域のみが形成されている。
(もっと読む)
位置検出装置、及び位置検出機能付き表示装置
【課題】使用する磁気センサの数を増やすことなく高解像度の位置検出を行う。
【解決手段】互いに離間して配置した複数の磁気センサによって、任意の入力位置における磁気を個別に検出する。隣接する4つで一組の磁気センサによってそれぞれ区画される複数の領域の中で、該領域を区画する一組の磁気センサの検出値の総和が最大である領域を、入力位置が含まれる特定領域として判定する。特定領域を区画する一組の磁気センサのうちで検出値が最大である特定の磁気センサの位置と、特定領域を区画する一組の磁気センサの検出値A(m,n)、A(m−1,n)、A(m+1,n)、A(m,n−1)、A(m,n+1)とに基づいて入力位置を算出する。
(もっと読む)
位置検出装置
【課題】位置検出性能の低下を防ぎ、安定した位置検出性能を得られる、複数の位置検出方式を備える位置検出装置を提供する。
【解決手段】第1の位置検出方式における送信導体の選択位置情報を第2の位置検出方式における信号受信のための導体選択に利用することで、第1の位置検出方式における送信導体と第2の位置検出方式における受信導体との間の空間的距離を可能な限り離間させる。更には、第1の位置検出方式における送信導体に供給される送信信号と第2の位置検出方式における送信導体に供給される送信信号との間に周波数インターリーブの関係を備える。
(もっと読む)
変位計用アンプ装置
【課題】 差動トランス式変位計と歪みゲージ式変位計のいずれを使用する場合であっても、共通して使用することが可能な変位計用アンプ装置を提供する。
【解決手段】 変位計が差動トランス式変位計であるか歪みゲージ式変位計であるかの種別を記憶した不揮発性記憶素子と、変位計の種別に基づいて変位計から受信した出力信号に対するゲインの値を変更する計装アンプ55と、変位計の種別に基づいて変位計から受信した出力信号に対する検波の方法を変更する相関係数計算部58と、変位計の種別に基づいて変位計に送信する電源電圧の波形を変更する波形メモリ53および波形制御部54とを備える。
(もっと読む)
渦電流測定あるいは光学測定を利用して、メタライゼーション処理を実状態で監視する方法
【課題】サンプルに形成された薄膜の除去工程中に該薄膜に関する情報を、渦電流プローブを使用して実状態で取得する方法を開示する。
【解決手段】渦電流プローブに検出コイルを設ける。渦電流プローブの検出コイルに交流電圧を印加する。渦電流プルーブの検出コイルがサンプルの薄膜に近接したときには、該検出コイルで第1の信号を測定する。該検出コイルが、既知の組成を有しおよび/または該コイルから離れて設けられた基準部材に近接する位置にあるときには、該検出コイルで第2の信号を測定する。第1の信号に含まれる利得及び/又は位相の歪みを第2の信号に基づいて校正する。校正した第1の信号に基づいて薄膜の特性値を決定する。上述の方法を実行する装置を更に開示する。加えて、研磨剤でサンプルを研磨し、このサンプルを監視する化学機械研磨(CMP)システムを開示する。このCMPシステムは、研磨テーブルと、研磨テーブル上でサンプルを保持する構成であるサンプルキャリヤと、渦電流プローブとを含む。
(もっと読む)
位置検出装置および方法
【課題】指示体の位置の誤検出を防止することができる位置検出装置および方法を提供すること。
【解決手段】位置検出装置100は、第1の方向に配置された複数の導体からなる送信導体群12と、第1の方向と交差する第2の方向に配置された複数の導体からなる受信導体群14と、指示体による位置指示に基づいて送信導体群12および受信導体群14の少なくとも一方に生起した信号を検出する信号検出回路34等と、送信導体選択回路23と、受信導体選択回路31とを備えている。送信導体群12および受信導体群14のそれぞれは、互いが隣接する少なくとも第1の導体群と第2の導体群とに区分けされており、第1の導体群を構成する各導体を選択する方向と第2の導体群を構成する各導体を選択する方向とが互いに異なるように導体の選択が行われる。
(もっと読む)
硬貨センサ、実効値算出方法および硬貨識別装置
【課題】出力信号の周波数と振幅とが検出する媒体の特徴に応じて変化する場合であっても、精度の高い出力結果を得ること。
【解決手段】自励発振回路から出力される検知信号を所定のサンプリング間隔でサンプリングし、所定期間においてサンプリングされたサンプリングデータを取得し、取得されたサンプリングデータのうち、前記所定期間の両端近傍においてサンプリングされたサンプリングデータの重み付けを他のサンプリングデータよりも小さくし、重み付けされた各サンプリングデータを用いて所定期間における検知信号の実効値を算出するようにした材厚/材質センサ。
(もっと読む)
接近警報装置
【課題】 あらゆる保線現場で、クレーンのブーム先端が高圧架空線から常に一定の距離に接近したことを検知できるように対応し得る接近警報装置を提供する。
【解決手段】 高圧架空線40が発する電界を検知し、高圧架空線40からの距離に比例する電界強度をA/D変換した値を無線送信する充電検知器1と、充電検知器1から無線送信された電界強度のA/D変換値を受信する警報器21とからなり、警報器21は、充電検知器1を高圧架空線40から所望の距離に配置した時に受信したA/D変換値に基づいて警報開始を設定可能とする。
(もっと読む)
インピーダンスセンサグリッドアレーを使用した電子的撮像装置及びその製造方法
近接して配置された物体表面に信号を送信するよう構成されたほぼ平行な複数の駆動ラインと、駆動ラインにほぼ垂直に配置され、誘電体によってピックアップラインから分離され、駆動ラインとピックアップラインのクロスオーバー位置のそれぞれにおいてインピーダンスを感知できる固有の電極対を形成する、ほぼ平行な複数のピックアップラインとを有する、新規なインピーダンスセンサが提供される。 (もっと読む)
位置検出装置
【課題】2重系の位置検出系統を1つの被検出体で実現し、かつ、小型化することができる位置検出装置を提供する。
【解決手段】位置検出装置1は、シフトレバー3の操作に応じて第1〜第3の移動線y1、y2、xに沿って移動するマグネット20と、第1の移動線y1に対しd1だけ離間する第1のMR回路11と、第1の移動線y1の直下に配置される第2のMR回路12と、第2の移動線y2の直下に配置される第3のMR回路13と、第2の移動線y2に対し第2のMR回路12とは反対側でd1だけ離間する第4のMR回路14と、位置判定部40とを備える。この位置判定部40は、第1及び第3のMR回路11、13の出力に基づいて第1の移動線y1上のマグネット20の位置を判定し、第2及び第4のMR回路12、14の出力に基づいて第2の移動線y2上のマグネット20の位置を判定する。これにより、1つのマグネットで2重系の位置検出を実現する。
(もっと読む)
位置検出装置
【課題】2重系の位置検出系統を1つの被検出体で実現し、かつ、小型化することができる位置検出装置を提供する。
【解決手段】位置検出装置1は、シフトレバー3の操作に応じて第1〜第3の移動線y1、y2、xに沿って移動するマグネット20と、第1の移動線y1に対しd1だけ離間する第1のMR回路11と、第1及び第2の移動線y1、y2の中間位置に配置される第2のMR回路12と、第2の移動線y2に対し第1の移動線y1とは反対側にd1だけ離間する第3のMR回路13と、位置判定部40とを備える。この位置判定部40は、第1及び第2のMR回路11、12の出力に基づいて第1の移動線y1上のマグネット20の位置を判定し、第2及び第3のMR回路12、13の出力に基づいて第2の移動線y2上のマグネット20の位置を判定する。これにより、1つのマグネットで2重系の位置検出を実現する。
(もっと読む)
21 - 40 / 148
[ Back to top ]