
Fターム[2F063LA23]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 電気回路、信号処理 (1,696) | 減算、差動 (163)
Fターム[2F063LA23]に分類される特許
41 - 60 / 163
位置検出装置
【課題】磁石及び磁気センサの特性のバラツキや組立精度の影響を抑えながら、回路規模が小さく、低消費電流による駆動を実現する。
【解決手段】位置検出装置は、2個の磁気センサ11a,11bが互いに離間されて配置される少なくとも1つの磁気センサ対と、磁気センサ対に対して移動自在又は傾斜自在に配設される磁石10と、各磁気センサ11a,11bの出力電圧を電流に変換するV/I変換回路12と、V/I変換回路12が変換した各電流I1,I2を基に、差電流(I1−I2)を生成する減算回路13と、V/I変換回路12が変換した各電流I1,I2を基に、和電流(I1+I2)を生成する加算回路14と、差電流(I1−I2)を和電流(I1+I2)で除算する電流除算回路15と、電流除算回路15が除算して得た値を位置信号Voとして出力する出力回路16と、を備える。
(もっと読む)
位置検出装置、位置検出回路及び位置検出方法

【課題】簡単な構成で人体を介して混入するノイズも効果的に相殺する、極めて精度が高く有用な位置検出装置を提供する。
【解決手段】受信電極を構成する各々の受信電極を三分割し、中心の電極を差動増幅器のプラス側入力端子に、両脇の電極を差動増幅器のマイナス側入力端子に接続することで、人体の指から混入するノイズを差動増幅器で効果的に相殺することができる。その際、従来技術の静電容量方式の位置検出装置のハードウェア構成はほぼそのままに、ソフトウェアをマトリクス電極に合わせて変更するだけで、容易に実現できる。
(もっと読む)
エンコーダおよび信号処理方法
【課題】磁気検出素子の出力にバラツキがある場合でも、検出精度を向上させ、高精度を有するエンコーダを提供する。
【解決手段】エンコーダが、第1の絶対位置エンコーダから入力された第1の検出信号に基づいて入力軸の角度位置を示す第1の位置データを検出する第1の位置データ検出回路と、第2の絶対位置エンコーダから入力された第2の検出信号に基づいて出力軸の角度位置を示す第2の位置データを検出する第2の位置データ検出回路と、第1の位置データと第2の位置データとを合成して、入力軸の多回転量とともに1回転内の角度位置を示す合成位置データを生成する位置データ合成回路と、を備え、前記第1の絶対位置エンコーダまたは前記第2の絶対位置エンコーダは、前記入力軸又は前記出力軸の回転にともない回転する回転子と前記回転子の周囲に配置される複数の磁気検出素子とを有する磁気式エンコーダである。
(もっと読む)
漏洩磁束検出型回転位置検出装置を組み込んだ液密サーボモータ装置
【課題】小型化、液密構造に適し、温度ドリフト補償に優れ、検出信号の伝送路のインピーダンス変化の影響を受けにくい回転位置検出装置を備えたサーボモータ装置を提供する。
【解決手段】サーボモータ1と共に液密にケーシング4内に収納されたセンサ10は、サーボモータ回転子から生じる漏洩磁束を検知する複数のコイルを備え、各コイルに対応して高透磁率磁性体がそれぞれ近接配置され、該高透磁率磁性体においては回転位置に対応する漏洩磁束の変化に応じて磁気飽和が生ぜしめられる。各コイルは磁気飽和の変化特性に応じて、回転位置に対応した振幅関数を持つ交流信号を出力する。正弦関数的振幅特性の2つのコイルは漏洩磁束の変化に対して互いに逆相となるように配置され、余弦関数的振幅特性の別の2つのコイルも同様に互いに逆相となるように配置される。この出力交流信号を合成して、電気的位相によって回転位置を示す検出信号を生成する。
(もっと読む)
位置検出装置
【課題】最小限の回路構成で、入力面上の複数の指の存在を確実且つ高速に検出する、位置検出装置を提供する。
【解決手段】受信側電極を差動増幅部の正極入力端子と負極入力端子のいずれかに必ず接続する切替スイッチを設ける。この切替スイッチに対し、正極入力端子に接続される電極子が複数並ぶ正極領域と、負極入力端子に接続される電極子が複数並ぶ負極領域と、電極子が正極入力端子と負極入力端子に交互に接続される不感領域とを形成するべく制御する。
(もっと読む)
多回転角度検出装置
【課題】小型かつ安価にしてフェールセーフ性に優れた多回転角度検出装置を提供する。
【解決手段】歯数が異なる第1ギア11及び第2ギア12を回転軸Y−Yの周囲に同心に形成してなるロータ1と、第2ギア12と噛み合わされ、その回転軸X−Xがロータ1の回転軸Y−Yと交差する方向又は食い違う方向に配置された第2従動ギア14と、第1ギア11と噛み合わされ、その回転軸が第2従動ギア14の回転軸と同心に配置された中継ギア17と、中継ギア17と噛み合わされ、その回転軸が第2従動ギア14の回転軸と平行に配置された第1従動ギア13と、第1及び第2の従動ギア13,14にそれぞれ取り付けられた第1及び第2の磁石18,19と、第1及び第2の磁石18,19とそれぞれ対向に配置された第1及び第2の磁気検出素子20,21とを備える。
(もっと読む)
多回転角度検出装置
【課題】小型の多回転角度検出装置を提供する。
【解決手段】鍔状のギア形成部1aに歯数が異なる第1ギア11及び第2ギア12が同心に形成されたロータの回転軸Y−Yを含む平面に対して、磁石18を備えた第1従動ギア13の回転軸X1−X1と、磁石19を備えた第2従動ギア14の回転軸X2−X2とをそれぞれ直交させて配置する。
(もっと読む)
ガスタービン制御装置
【課題】ガスタービン制御装置の保守性の向上を図る。
【解決手段】ガスタービン制御装置は、バルブの開度に連動する可動鉄芯と、可動鉄芯の周囲に配置される1次コイル32と、1次コイル32に対応して設けられる2つの2次コイルと、を有する差動トランスより、1次コイル32及び2つの2次コイルに対する可動鉄芯の位置が変化する場合に、電源から1次コイル32に加えられる励磁電圧の電圧値及び励磁電圧によって2つの2次コイルに生じる誘起電圧の電圧値が入力される入力部と、2つの2次コイルのそれぞれの誘起電圧から求められた誘起電圧の電圧値の差を励磁電圧の電圧値で除して、可動鉄芯の位置を示す情報を演算する位置演算部38と、演算された可動鉄芯の位置に基づいて、バルブの開度を求め、バルブの開度を指示する開度指示値を、バルブの開度を制御する開度制御部に出力する出力部と、を備える。
(もっと読む)
静電型エンコーダおよび内視鏡
【課題】小型光学機器で狭いスペースに組み込まれた複数のレンズを位置または変位を正確に計測できる実用性の高い静電型エンコーダ、これを備えた内視鏡を提供する。
【解決手段】静電型エンコーダは、位置計測方向に配置された電位検出電極13を有する固定子11と、各々が、交流信号TXが供給される電位発生電極17A,17Bを有し、固定子との相対的位置が変化するように設けられた2つの移動子12A,12Bと、2つの移動子のいずれか1つに選択的に交流信号を供給する交流信号供給手段21,25と、固定子の電位検出電極から出力された信号に基づいて2つの移動子のいずれか1つの変位信号を生成する信号処理装置20とを備える。静電型エンコーダは時分割で2つの移動子の変位を独立して計測する。
(もっと読む)
車両のシフト位置検出装置
【課題】シフトレバーが2軸方向に移動する場合であれ、シフト位置検出装置としての部品点数の増加を招くことなくシフトレバーのシフト位置を検出することが可能な車両のシフト位置検出装置を提供する。
【解決手段】このシフト位置検出装置は、車両のシフトレバーの2軸方向の操作に連動して互いに直交する2軸方向に移動するとともにこの移動に伴ってMREセンサ1に近接するカウンタ磁石2と、MREセンサ1にバイアス磁界を付与するバイアス磁石3とを備えている。そして、カウンタ磁石2がMREセンサ1に近づくときに生じるバイアス磁界の磁気ベクトルの変化をMREセンサ1により感知してカウンタ磁石2のMREセンサ1への近接を検知するとともに、この検知に基づいてシフトレバーのシフト位置を検出する。ここでは、バイアス磁石3の着磁方向とカウンタ磁石2の着磁方向とを互いに直交させるようにしている。
(もっと読む)
車両用障害物検出装置および歩行者保護用エアバッグ展開制御装置
【課題】自動車等の車両に対する障害物を正確かつ確実に検出する。
【解決手段】車両用障害物検出装置は、車両1のフロントバンパー2に配置された静電容量センサ部10〜30と、回路部50とを備える。歩行者保護用エアバッグ展開制御装置は、制御部60、歩行者保護装置70および歩行者保護用エアバッグ81〜83を備える。歩行者保護用エアバッグ81〜83は各静電容量センサ部10〜30と対応する位置のボンネット3の後端側を跳ね上げ可能に配置されている。各静電容量センサ部10〜30は、センサ電極11、シールド電極12および補助電極13を備える。センサ電極11のみで検出された第1の静電容量値C1とセンサ電極11および補助電極13で検出された第2の静電容量値C2とを用いて指向性を設定し、各静電容量センサ部10〜30の表面上に検知範囲Z1〜Z3を形成して障害物を検知する。
(もっと読む)
挟み込み防止装置
【課題】車両の開閉部への物体の挟み込みを安全かつ確実に防止する。
【解決手段】挟み込み防止装置は、車両1のウィンドウ3Aが完全閉状態時に当接するウィンドウ枠部3Bの当接側端部3b内に枠形状に沿って配置され、物体を検知する静電容量センサ部10と、回路部20とを備える。静電容量センサ部10は、センサ電極11、シールド電極12および補助電極13を備える。センサ電極11のみで検出された第1の静電容量値C1とセンサ電極11および補助電極13で検出された第2の静電容量値C2とを用いて指向性を設定し、静電容量センサ部10の表面上に検知範囲Zを形成して乗員の手49や指などを検知し、ウィンドウ3A等に接触する前に閉動作を停止させる。
(もっと読む)
乗員姿勢検知装置およびエアバッグ展開制御装置
【課題】車両の座席に着座した乗員およびその姿勢を正確に検知する。
【解決手段】乗員姿勢検知装置100は、車両1のインストルメントパネル2に配置された第1静電容量センサ部10と、車室天井部3に配置された第2静電容量センサ部20と、回路部30とを備え、各静電容量センサ部10,20は、センサ電極11の検知面がそれぞれ検知領域DZに向くように配置されている。第1および第2静電容量センサ部10,20は、センサ電極11、シールド電極12および補助電極13を備える。センサ電極11のみで検出された第1の静電容量値C1とセンサ電極11および補助電極13で検出された第2の静電容量値C2とを用いて指向性を設定し、インストルメントパネル2および車室天井部3の表面上に検知範囲Z1,Z2を形成して検知領域DZ内に乗員の体幹部48や頭部49があるか否かを検出して着座姿勢を判定する。
(もっと読む)
車両用ドア開閉角度制御装置
【課題】車両用ドアの外側および内側の障害物や人体の有無により車両用ドアの開閉角度を制御して、不用意な車両用ドアの他車等への接触を確実に防止する。
【解決手段】車両用ドア開閉角度制御装置は、車両1のサイドドア2の外側および内側に検知面が存するように配置された第1および第2静電容量センサ部10,20と、回路部30とを備える。各静電容量センサ部10,20は、センサ電極11、シールド電極12および補助電極13を備える。センサ電極11のみで検出された第1の静電容量値C1とセンサ電極11および補助電極13で検出された第2の静電容量値C2とを用いて指向性を設定し、各静電容量センサ部10,20の表面上に検知範囲Z1,Z2を形成してサイドドア2の外側および内側の障害物や人体を検知する。ドアECU50は、回路部30からの出力によりサイドドア2の開閉角度や開閉動作を制御する。
(もっと読む)
回転要素の振動の測定
【解決手段】本発明は、対象物(2) の回転軸(A) に垂直な面における点に対する回転軸の距離(h) の変化を測定するためのシステムに関しており、システムは、回転軸の周りの対象物の角度位置を表す値を測定するための少なくとも2つのセンサ(31,32) を備えており、センサの内の少なくとも第1のセンサは、点に対して固定された位置に設けられており、対象物の全周に亘って変わる磁化を有する対象物によって生成される磁場の測定に適切な磁力計を有している。システムは、対象物の回転毎に、回転軸(A) に対するセンサ間の角距離(ψ)の変化に基づき距離(h) の変化を決定するための手段を更に備えている。 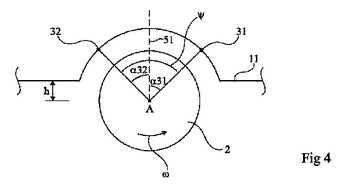 (もっと読む)
(もっと読む)
慣性駆動アクチュエータのキャリブレーション方法、慣性駆動アクチュエータ装置及び移動体の位置算出方法
【課題】移動体と電極との間の静電容量が、アクチュエータ組み立て後に異なる値を示すようになっても、適切な値に修正することができ、これにより移動体の絶対位置を確実かつ正確に算出することのできる慣性駆動アクチュエータ装置を提供する。
【解決手段】移動体電極と振動基板電極とが対向する部分の静電容量を、一方及び他方の移動限界位置において検出する静電容量検出ステップと、静電容量検出ステップにおいて検出された、一方及び他方の移動限界位置での静電容量を記憶する静電容量記憶ステップと、静電容量記憶ステップにおいて記憶された一方及び他方の移動限界位置での静電容量と、一方及び他方の移動限界位置間の移動限界距離と、の比率を算出する比率算出ステップと、算出した比率を用いて、一方及び他方の移動限界位置間における移動体の絶対位置を算出する絶対位置算出ステップと、を備える。
(もっと読む)
慣性駆動アクチュエータのキャリブレーション方法及び慣性駆動アクチュエータ装置
【課題】移動体が複数ある場合において、正しくキャリブレーションを行うことのできる慣性駆動アクチュエータのキャリブレーション方法及び慣性駆動アクチュエータ装置を提供する。
【解決手段】移動手段により往復移動される振動基板に対して、慣性により、複数の移動体のうちの対象となる対象移動体が、一方及び他方の移動限界位置間を移動するように駆動を行い、静電容量によって位置検出を行う慣性駆動アクチュエータのキャリブレーション方法であって、対象移動体に設けられた移動体電極と、振動基板に設けられた振動基板電極と、が対向する部分の静電容量を、一方及び他方の移動限界位置において検出し、これら一方及び他方の移動限界位置での静電容量と、一方及び他方の移動限界位置間の移動限界距離との比率を算出する。さらに、一方及び他方の移動限界位置の少なくとも一方は、対象移動体が対象以外の移動体に突き当たる位置である。
(もっと読む)
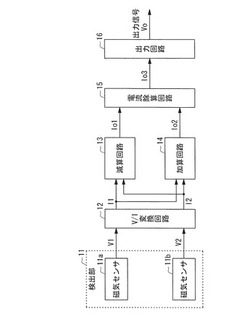
硬貨識別装置
【課題】装置全体の小型化を図りながら、部品点数の削減によるコストの低減化を図ることができる硬貨識別装置を提供すること。
【解決手段】投入された硬貨(C)が通過する硬貨通路(1)の近傍に配置され、硬貨通路を通過する硬貨の識別を行う硬貨識別装置において、硬貨通路に磁界を生じさせる環状励磁コイル11と、環状励磁コイル11の内部に配設され、かつ硬貨通路を硬貨が通過するときの磁界変化を検出する第1検出コイル13及び第2検出コイル14と、第1検出コイル13及び第2検出コイル14のそれぞれが検出した磁界変化に応じた信号の和により、硬貨の厚みを検出する材厚検出部313と、第1検出コイル13の検出した磁界変化に応じた信号により硬貨の材質を検出する材質検出部312と、第1検出コイル13及び第2検出コイル14のそれぞれが検出した磁界変化に応じた信号の差により硬貨の凹凸を検出する凹凸検出部314とを備えている。
(もっと読む)
乗員姿勢検知装置および乗員姿勢検知方法
【課題】安価に構成可能でコストの削減を図りつつ乗員の姿勢を検知する。
【解決手段】乗員姿勢検知装置100は、静電容量センサ部10と回路部20とを備える。静電容量センサ部10は、車室天井部2の座席40の前方および座席40の直上にそれぞれ配置された第1および第2検知電極11,12を備え、各検知電極11,12は切替スイッチSW1,SW2を介して回路部20の静電容量検知回路21とシールド駆動回路23とにそれぞれ接続されている。回路部20のCPU29は、静電容量検知回路21にて検出された各検知電極11,12からの静電容量に基づく静電容量値を用いて、座席40に着座した乗員(人体)48の頭部49の位置の情報に基づいて着座姿勢を判定する。判定した着座姿勢に関する姿勢情報は、車両1に搭載されたECUに出力され、エアバッグの展開等の制御に用いられる。
(もっと読む)
磁気エンコーダ装置
磁気エンコーダ装置用の磁気スケール(4;62)が説明される。磁気スケール(4;62)は複数の溝(16,18;42,44)を具えるスケール部材を具える。スケール部材は、対応する磁気スケールリーダユニット(6;76)によって読み取り可能な受動的磁気スケールトラックを画成している。複数の溝は、少なくとも第1溝種類の溝(16,42)および第2溝種類の溝(18,44)を具え、第1溝種類の溝(16,42)の位置における磁気スケールの磁気特性は第2溝種類の溝(18,44)の位置における磁気スケールの磁気特性と異なっている。スケール部材はデータビットのシーケンスを具える少なくとも1つのコードワードの形態の絶対位置情報を担持し、データビットの各々はスケール部材の溝によって提供され、データビットは、溝(16,42)が第1の溝種類のものである場合には第1の値(1)を、溝(18,44)が第2の溝種類のものである場合には第2の値を取る。複数の溝(16,18;42,44)の中点はスケール部材(4;62)の長さ方向に沿って実質的に等間隔である。従って、相対および絶対位置情報を磁気スケール(4;62)から抽出することができる。  (もっと読む)
(もっと読む)
41 - 60 / 163
[ Back to top ]