
Fターム[2F063LA23]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 電気回路、信号処理 (1,696) | 減算、差動 (163)
Fターム[2F063LA23]に分類される特許
81 - 100 / 163
渦電流式試料測定方法と、渦電流センサと、渦電流式試料測定システム
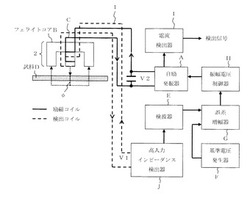
【課題】 フェライトコアに巻かれた励磁コイルと交流電源の間に接続されるリード線のインダクタンス及び抵抗成分の影響を受けて、励磁コイルに供給される交流電圧を一定に保つことが出来ず測定誤差の要因となっている。
【解決手段】 渦電流センサの磁心に交流磁界を発生させる励磁コイルとは別に電圧検出コイルを設け、渦電流発生時の電圧検出コイルの誘起電圧を検出コイルのインピーダンスに対して高入力インピーダンスである検出器で検出する。前記検出器で検出された検出電圧で励磁コイルに印加する高周波電圧を制御する。測定用渦電流センサと試料を測定しない非測定用渦電流センサを使用し、夫々の渦電流センサの磁心に励磁コイルとは別に設けた電圧検出コイルを夫々の誘起電圧が逆方向となるように直列接続し、非測定用渦電流センサの検出コイルの誘起電圧と、試料測定した測定用渦電流センサの検出コイルの誘起電圧との電圧差を前記直列接続した電圧検出コイルの測定端子で検出するようにした。
(もっと読む)
タッチセンサおよびタッチセンサの制御方法、並びにプログラム

【課題】少ない静電容量センサの数で、静電容量センサが配置された接触領域のうち、物体が接触または近接した位置を連続的な値により高い精度で検出する。
【解決手段】強度取得部12は、静電容量センサ21−1乃至21−4により検出された静電容量の変化の強度を、第1象限乃至第4象限に対して環状に配置したときの検出結果として取得する。水平方向計算部31は、第1象限と第4象限の検出結果との和より、第2象限と第3象限の検出結果との和を減算して、物体が接触または近接した位置の水平方向の検出位置を計算する。垂直方向計算部32は、第1象限と第2象限の検出結果との和より、第3象限と第4象限の検出結果との和を減算して、物体が接触または近接した位置の垂直方向の検出位置を計算する。位置出力部14は、物体が接触または近接した位置の水平方向および垂直方向の位置を出力する。本発明は、タッチセンサに適用することができる。
(もっと読む)
無人飛行ビークルの飛行中燃料給油方法およびシステム
無人飛行ビークルに燃料給油するためのシステムおよび方法である。システムは第2の無人飛行ビークルから第1の無人飛行ビークルに燃料給油するように構成されており、予め定められた距離内で近接して第1および第2のビークルを飛行し、飛行中に第2のビークルから第1のビークルへ燃料供給ラインで接続するための構成を含んでいる。示されている実施形態では、接続のための構成は第1のビークル上の燃料給油レセプタクルを電磁的に検出する標的システムを含んでいる。追尾装置が第2のビークル上の前記燃料供給ラインの第1の端部に配置されている。追尾装置は第1のビークル上のレセプタクル周囲の第1のコイルからの磁気信号を検出するように適合された3つの検出器コイルを含んでいる。コイルが取付けられ、それによって検出器コイルは異なる方向で指向する。コイルの出力はタンカーのUAVからのUAVまでの方向と距離を決定するために処理される。 (もっと読む)
移動体位置検出装置
【課題】コンピュータに依存することなく、装置の故障を検出すること。
【解決手段】円筒状の磁石42が固定され傾倒可能に配設された移動体(シフトレバー4)と、磁石42の周面に対向配置され移動体の直交する方向の傾倒量を検知するGMRセンサ71、72と、磁石42の周面に対向配置されGMRセンサ71、72のいずれの検知面とも平行でない位置に検知面が配置されたGMRセンサ73と、GMRセンサ71、72による検知値と、GMRセンサ73による検知値とに基づいて少なくともGMRセンサ71〜73のいずれか1つの故障を判定する判定回路(加算回路74、比較回路75)とを具備することを特徴とする。
(もっと読む)
測定装置および測定方法
【課題】 測定対象物由来の物理量を安定して測定することができる測定装置および測定方法を提供する。
【解決手段】 互いの接地が接続された静電容量変換部11,21から、静電容量式変位センサ12,22に、位相の総和が0°となる、同一周波数の正弦波状のキャリア信号を印加して、測定対象物30の厚さを測定する。
(もっと読む)
回転角度検出装置
【課題】ステアリングシャフトの操舵角検出装置において、コスト増を招くことなく、高精度にギアの歯欠け異常を検出する。
【解決手段】ステアリングシャフトと一体のロータギアに対して増速側検出用ギアと減速側検出用ギアを連動して回転させ、両検出用ギアに付設したMRセンサ7a、7bからのサンプリングデータを増速機構側演算部60および減速機構側演算部70で演算処理してステアリングシャフトの増速角と減速角を算出する。故障診断部80では、増速角および減速角移動平均化処理部81、82で増速角と減速角のそれぞれ移動平均値を算出し、差分算出部84で各移動平均値の差分を算出して、変位量算出部86で求めたサンプリングごとの差分の変位量が基準値S0より大きいときに、異常検出部88が各ギアの連動系統のいずれかにギアの歯欠け異常がある旨の異常信号を出力するものとした。
(もっと読む)
モータにおけるロータ部の浮上量測定方法および浮上量測定装置
【課題】モータのロータ部の浮上量を安定して取得する。
【解決手段】浮上量測定装置5は、ロータ部3を回転するモータ駆動部51および静電容量型変位計である測定機構52を備える。ロータ部3の浮上量を測定する際には、モータ駆動部51によりロータ部3が低速回転され、その間に、ロータ部3に対向する測定機構52の測定部521を介してロータ部3のディスク載置面3112aと測定部521との間の距離に対応する測定値が取得される。その後、ロータ部3がモータ駆動部51により定格回転され、定格回転時での測定値が取得される。低速回転時での測定値をモータ1の停止時の測定値とみなして低速回転時および定格回転時の測定値の差を浮上量とすることにより、ロータ部3の浮上量が安定して求められる。
(もっと読む)
動き検出装置、動き検出方法及び電子機器
【課題】動作対象の動きを簡易に検出することができるようにする。
【解決手段】本発明は、動き検出システムにおいて、識別指標によって区別された複数周波数からなる準静電界を、少なくとも2以上の電界発生源から発生する準静電界発生装置と、動作対象に設けられ、準静電界の受信周波数に基づいて各電界発生源までの距離をそれぞれ判定し、当該判定した各距離を通知する距離判定装置と、距離判定装置により通知される各距離に基づいて距離判定装置の位置を算出し、当該算出した位置と予め保持された基準位置との変化量を動作対象の動き量として検出する動き検出装置とを設けるようにした。
(もっと読む)
導電材料製構造物の損傷検出方法
【課題】使用中の導電材料製構造物に生じる損傷を非破壊的に、しかも装置等の操業を停止することなく、簡便に検出できる、導電材料製構造物の損傷検出方法を提供する。
【解決手段】複数の電位差測定用端子を所定の間隔で隔離して、構造物の被測定領域を囲んで配置し、複数の電位差測定用端子を挟んで設けられた一対の電極を介して構造物の特定方向に電流を供給しながら、被測定領域を挟んで相対する電位差測定用端子間に生じる電位差を測定する第一の工程と、前記一対の電極とは別に複数の電位差測定用端子を挟んで設けられる他の一対の電極を介し、構造物の特定方向とは異なる方向に電流を供給しながら、被測定領域を挟んで相対する各電位差測定用端子間に生じる電位差を測定する第二の工程とを順次行い、各電位差測定用端子間の電位差を測定する。得られた異なる二方向の各電位差測定用端子間の電位差から、被測定領域における電位差分布、電位差変化率分布を求め、被測定領域における損傷状態を評価する。
(もっと読む)
非接触センサ
【課題】誘電体等の被検出物の位置を検出する静電容量型などの非接触センサにおいて、短時間で確実に所望の検出位置における最適なゲインとオフセットに調整できるようにする。
【解決手段】被検出物20がない第1の状態と、所定の距離に被検出物20がある第2の状態で、それぞれ同様に検出ゲインを変化させ、各ゲインにおいて所定の出力値となるようにオフセット値を調整し、当該オフセット値を格納し、第1の状態のオフセット値と第2の状態のオフセット値が最も近くなったときの当該ゲインおよびオフセット値を調整値とするようにした。
(もっと読む)
静電容量型センサ及びそれを用いる近接検出器
静電容量型センサを、路上走行車用の障害物警告システムの近接検出器として、例えば車が後退するときに使用する。デジタル信号処理装置11は、センサRC回路1、7を介して正弦波を送信する。センサプレート3はセンサコンデンサ1の1つのプレートとして作用し、障害物45は別のプレート5として作用する。車43と障害物との間の距離の変化は、センサコンデンサ1の静電容量を変化させ、センサRC回路から出力される正弦波の振幅及び位相を変化させる。基準信号回路17、19、21で生成される基準正弦波は、減算器15でセンサ出力信号から減算される。基準信号は、センサ信号の位相オフセットを有するので、差信号の振幅はセンサ信号の位相変化に対して非常に敏感である。センサ信号と等価の付加信号は、結合コンデンサ41によってセンサRC回路の出力と結合される。これは、センサ信号を妨害せずに高周波ノイズにグランドへの経路を提供する。 (もっと読む)
CFRP板貼付域の疲労き裂進展のモニタリング方法
【課題】CFRP板接着により疲労き裂を補修した場合、目視などによる直接的な確認が困難なCFRP貼付域におけるき裂の進展を把握する方法を提供する。
【解決手段】鋼製材料に導入されたき裂を炭素繊維強化プラスチック(CFRP)板で補修した構造物におけるき裂進展状況をモニタリングする方法であって、前記き裂の先端部からき裂進展方向のき裂未進展部の任意の基準点と、該基準点とき裂先端部との間の任意の1点の少なくとも2点間の前記CFRP板表面上のひずみ差を経時的にモニタリングし、ひずみ差の増大傾向からき裂の進展状況が把握でき、また、ひずみ差のピーク値からき裂が基準点を通過する状況が把握できる。
(もっと読む)
磁気記録媒体の保護膜厚測定方法および磁気記録媒体評価装置
【課題】磁気記録層上に保護膜を有する磁気記録媒体について、光学的測定を行うことなく電磁変換特性検査工程の中で保護膜厚検査も同時に行うことが可能となる方法を提供する。
【解決手段】本発明に係る磁気記録媒体の保護膜厚測定方法は、被測定媒体と保護膜厚が測定済みの参照用媒体のそれぞれについて、波数k1の正弦波信号を書き込み、再生信号振幅A1を測定し、次いで、前記波数k1と異なる波数k2の正弦波信号を書き込み、再生信号振幅A2を測定した後、それぞれの媒体について読み出し距離d1、d0を算出し、前記被測定媒体の読み出し距離d1と前記参照用媒体の読み出し距離d0との差から被測定媒体の保護膜厚を算出することを特徴とする。
(もっと読む)
表面形状校正装置および表面形状校正方法
【課題】被測定物の表面形状(真直度)をナノレベルで精密に測定する方法およびその測定に用いる表面形状校正装置の提供。
【解決手段】x軸方向およびy軸方向に移動可能なxyステージに搭載された3対の変位センサを保持する変位センサ保持具3組の各組変位センサを用い、前記3対の変位センサ保持具の凹字状アームの凹字空間に挿まれる状態で、かつ、前記xyステージとは独立して180度反転可能に保持される基準直定規の被測定面(表面および裏面)と変位センサ間距離、固定テーブル上に載置された加工ワークの被測定面と変位センサ間距離を測定し、その距離値をコントローラより電気信号としてデータ解析装置に送信し、それら送信された距離電気信号値から被校正測定物のx座標およびy座標の表面形状値を算出する。
(もっと読む)
磁気軸受のセンサーレス稼動のための方法と装置
この発明は、磁気軸受のセンサーシステムに関し、二つの作動コイル(1、2)、クロック化された二つの出力段(4,5)、作動コイル(1,2)を流れるリップル電流を持つ電流を検出する電流計(3)及びセンサーインターフェイスから成る。クロック化された出力段(3,4)は、予め決められた順番でパルス幅が少し狭められ或いは広められるようパルス幅変調された出力電圧を与える。クロック化された出力段(3,4)のパルス幅は、互いに固定された位相関係で変調される。このセンサーシステムは、クロック出力段を有する磁気軸受のためのセンサーシステムを特定する目的を果たす。発明は、磁気軸受、それを制御する装置、磁気軸受ないの位置を検出する方法にも関連する。 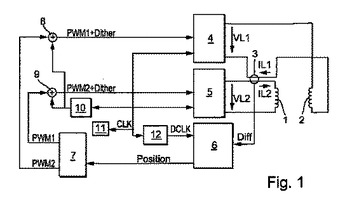 (もっと読む)
(もっと読む)
磁気検出方法およびその装置
【課題】実装ズレがあった場合に磁気検出の誤差を低減する、2次元平面上での磁気検出方法およびその装置を提供すること。
【解決手段】本発明に係る磁気検出方法の実施形態では、x軸上の1対のホール素子301、302の出力信号から算出される検出信号を、磁石のx座標の関数として直線補間して、傾きa、切片bを求める。次に、y軸上の1対のホール素子303、304の出力信号から算出される検出信号を、磁石のx座標の関数として直線補間して、傾きc、切片dを求める。次に、1対のホール素子301、302の出力信号から算出される検出信号を、磁石のy座標の関数として直線補間して、傾きe、切片fを求める。次に、1対のホール素子303、304の出力信号から算出される検出信号を、磁石のy座標の関数として直線補間して、傾きg、切片hを求める。これらのパラメータを用いて、予め定めた数式により磁石の検出位置を算出して磁気検出を行う。
(もっと読む)
ワイヤーロープの探傷装置
【課題】
破断部位がワイヤーロープの深部であっても損傷計測の信頼性を向上する。
【解決手段】
鋼線の損傷部に発生する漏洩磁束を検出するワイヤーロープの探傷装置において、ワイヤーロープ1を長手方向に磁化するように磁化器2と、ワイヤーロープ1の円周方向に複数個配置され、漏洩磁束を検出する磁気検出手段3,4と、損傷部の深さ,損傷量,複数個の磁気検出手段から検出した値の和、隣接した磁気検出手段により検出された差分値、との関係を予め記憶した記憶器8,10と、を備え、磁気検出手段により得られた値と、記憶器に記憶された値と、に基づいて損傷部の深さ及び損傷量を求める。
(もっと読む)
近接検出装置及び近接検出方法
【課題】 物体の接近を電極の浮遊容量により検出近接センサーにおいて、ノイズの影響を除去し、物体との距離が大きい場合でも高速で精度の高い位置検出を行うことの出来る近接検出装置を提供する。
【解決手段】 差動電極に位相の反転した充放電を行い、充放電の特性から差動電極の浮遊容量の和を求めることにより、ノイズをキャンセルされた浮遊容量から物体の接近や位置を検出するようにした。
(もっと読む)
位置検出システムおよび位置検出方法
【課題】外部からの電力供給により交番磁界を発生する一のマーカと、該交番磁界の周波数と同一またはその近傍に共振周波数を有する共振回路を備えた他のマーカとがともに存在した場合であっても、一のマーカの位置または方向を正確に検出する。
【解決手段】外部からの電力供給により、所定の周波数だけ離れた一組の第1の位置算出用周波数を有する第1の交番磁界を発生する第1のマーカ4と、一組の第1の位置算出用周波数に挟まれた略中心の周波数を共振周波数とする磁気誘導コイル5を搭載した第2のマーカ3と、その作動範囲の外部に配置され、第1の位置算出用周波数において磁界を検出する磁界検出部13と、検出された磁界から一組の第1の位置算出用周波数を有する一組の第1の検出磁界成分の強度の加算値を抽出する抽出部30と、抽出された加算値に基づいて第1のマーカ4の位置および方向の少なくとも一方を算出する位置方向解析部22とを備える位置検出システム1を提供する。
(もっと読む)
センサ付き転がり軸受装置
【課題】車輪のモーメント荷重や軸方向の並進荷重を求めることが可能なセンサ装置を備え、上記センサ装置と独立のABSセンサを設置しなくても、回転軌道部材の回転速度を検出することができるセンサ付き転がり軸受装置を提供すること。
【解決手段】ターゲット部材73の外周面で構成される被変位検出部の一部に、軸方向に延在する溝155を有する環状部150を形成する。
(もっと読む)
81 - 100 / 163
[ Back to top ]