
Fターム[2F063LA24]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 電気回路、信号処理 (1,696) | 乗算 (32)
Fターム[2F063LA24]に分類される特許
1 - 20 / 32
回転角度検出装置
角度検出装置、モータ駆動装置及び画像形成装置

【課題】コスト増加を伴わずにモータの回転角を安定的かつ高精度で検出することができる角度検出装置を提供する。
【解決手段】角度検出装置は、モータの回転子の回転角度に応じて正弦波状に変化する正弦波信号であって、互いの配置位置により位相の異なる正弦波信号を出力する複数のセンサ(15)と、少なくとも2つの前記正弦波信号同士を相互演算した結果により表されるベクトルを生成するベクトル生成手段(30)と、前記ベクトルと複数の位相を有する基準正弦波とを演算することにより、前記ベクトルを回転させるベクトル回転手段(40)と、前記ベクトル回転手段を用いて、前記ベクトルが所定位相になるまで前記ベクトルを順次回転させ、回転前の前記ベクトルと当該所定位相のなす角度をモータの回転子の回転角度として検出する角度探索手段(50)とを備える。
(もっと読む)
長尺材の変位量測定装置

【課題】長尺材のうねり(変位量)を簡易かつ正確に測定することができる長尺材の変位量測定装置を提供する。
【解決手段】変位量測定装置は、定速走行部1と、架台2と、加速度計3と、記録計4とを備える。定速走行部1は、上下方向に伸びる長尺材(ガイドレールR)に沿って定速で走行する。架台2は、この定速走行部1と共に長尺材に沿って移動される。加速度計3は、架台2の平面方向の加速度を計測する加速度計であって、長尺材のうねりに応じて傾いた架台2の平面方向に生じる重力の加速度成分を計測する。記録計4は、加速度計3の計測結果を記録する。この計測結果と定速走行部1の走行速度とを利用することで、長尺体の変位量を演算により求めることができる。
(もっと読む)
回転角度検出装置
【課題】簡単な構成で多回転の回転角度及びトルク検出ができるとともに、搭載スペース及びコストを低減できる回転角度検出装置を提供する。
【解決手段】第1のメインギヤ1はステアリングシャフト106の入力軸5に、第2のメインギヤ2は出力軸6に嵌合して連結された多回転可能な歯車を持つ回転体であり、トーションバー7は入力軸5と出力軸6の間の同心軸上に配置されている。第1,第2の検出ギヤ3,4はそれぞれメインギヤ1,2の歯車に係合するように設けられた回転体であり、中央部には磁石8,9が配置されている。磁気式角度センサ10,11は検出ギヤ3と検出ギヤ4との間に設けられた基板12上に配置され、対向する磁石8,9の磁界方向を検出し、これらの出力信号に基づいて回転角度演算手段13によって検出ギヤ3,4の多回転の回転角度θm1,θm2が算出され、メインギヤ1,2の多回転の回転角度θmが検出できる。
(もっと読む)
多地点測定データ取得装置および多地点測定システムおよび多地点測定データ取得方法
【課題】圃場に埋設された複数のセンサユニットの位置を設置後に収集可能な多地点測定データ取得装置および多地点測定システムおよび多地点測定データ取得方法を提供する。
【解決手段】1本の伝送路に固定された複数のセンサユニットそれぞれによって前記伝送路を介して返される応答から、前記各センサユニットが固定された位置から前記伝送路の一端までの伝送路長と前記各センサユニットの固定位置における前記伝送路の屈曲方向に関する情報とを含む情報を抽出する情報抽出部と、前記情報抽出部で抽出された情報に基づいて、前記複数のセンサユニットの配置を推定する配置推定部とを備える。
(もっと読む)
変位量検出装置
【課題】 製造が容易であり、生産コストを低減することができる変位量検出装置を提供する。
【解決手段】 検出対象物21が角変位することによって、検出対象物21と第1および第2検出用コイル25a,25bとの相対距離が変化すると、第1および第2検出用コイル25a,25bのインダクタンスが変化し、第1および第2検出用コイル25a,25bのインダクタンスが変化して、発振回路22の発振周波数が変化する。各発振回路22の発振周波数に基づいて、信号処理部23が参照用の電気信号を検出対象物21の変位量に相当する電気信号に変換して出力するので、変位する部分にコイルを巻回する必要がなくなり、製造に高度な加工技術が必要としないので、製造が容易となり、また生産コストを低減することができる。
(もっと読む)
変位量検出装置
【課題】 環境因子の影響を受けずに検出対象物の変位量を検出することができる変位量検出装置を提供する。
【解決手段】 発振回路2は、検出対象物4との相対距離の変化に応じてインダクタンスが変化するコイル5を備え、前記コイル5のインダクタンスに依存する周波数の信号を出力する。信号処理部3は、各コイル5と検出対象物4との相対距離をそれぞれ独立変数として、各発振回路2の発振周波数を予め定める次数の多項式でそれぞれ近似し、この近似した複数の多項式を用いて前記多項式の係数を消去することによって求められる各発振回路2の発振周波数と検出対象物4の変位量yとの関係に基づいて、検出対象物4の変位量yに相当する電気信号を出力する。
(もっと読む)
渦電流測定あるいは光学測定を利用して、メタライゼーション処理を実状態で監視する方法
【課題】サンプルに形成された薄膜の除去工程中に該薄膜に関する情報を、渦電流プローブを使用して実状態で取得する方法を開示する。
【解決手段】渦電流プローブに検出コイルを設ける。渦電流プローブの検出コイルに交流電圧を印加する。渦電流プルーブの検出コイルがサンプルの薄膜に近接したときには、該検出コイルで第1の信号を測定する。該検出コイルが、既知の組成を有しおよび/または該コイルから離れて設けられた基準部材に近接する位置にあるときには、該検出コイルで第2の信号を測定する。第1の信号に含まれる利得及び/又は位相の歪みを第2の信号に基づいて校正する。校正した第1の信号に基づいて薄膜の特性値を決定する。上述の方法を実行する装置を更に開示する。加えて、研磨剤でサンプルを研磨し、このサンプルを監視する化学機械研磨(CMP)システムを開示する。このCMPシステムは、研磨テーブルと、研磨テーブル上でサンプルを保持する構成であるサンプルキャリヤと、渦電流プローブとを含む。
(もっと読む)
回転角検出装置、および、これを用いた電動パワーステアリング装置
【課題】故障などにより異常となった出力信号を特定可能な回転角検出装置を提供する。
【解決手段】ブリッジ回路11、12は、被検出部87の回転に応じて変化する回転磁界によりインピーダンスが変化するセンサ素子21〜28により構成されるハーフブリッジ14〜17を有する。信号取得手段は、ハーフブリッジ14〜17の中点31〜34から出力される出力信号をハーフブリッジ14〜17ごとに取得する。回転角算出手段は、信号取得手段により取得された出力信号に基づき、被検出の回転角度θを算出する。異常特定手段は、信号取得手段によって取得される少なくとも4つの出力信号に基づく値である演算値が所定の範囲から外れた場合、当該演算値に対応する出力信号を異常出力信号として特定する。これにより、故障などによりどの出力信号が異常となったかを特定することができる。
(もっと読む)
回転電機の回転子軸心位置測定方法及び回転電機の回転子軸心位置測定装置
【課題】回転子の軸心位置と固定子の中心とのずれを高価な測定装置を用いず簡単な構成で、高精度かつ短時間に測定することができる回転電機の回転子軸心位置測定方法及び装置を提供する。
【解決手段】固定子1においては互いに対向する固定子巻線15a、15bを有し、固定子1内には所定のエアギャップ5を介して回転子2が配置され、交流電圧源Vacによって固定子巻線15a、15bに電流を流し、固定子巻線15a、15bに流れる電流値の差を電流測定手段6によって測定することにより、回転子2の軸心の固定子1の中心軸に対する位置ずれの方向と大きさを測定する。
(もっと読む)
位置検出装置及びセンサユニット
【課題】安価に構成できると共に位置検出精度を向上した位置検出装置を提供する。
【解決手段】電磁誘導型位置検出装置の、コイル基板の直下に配される磁路シートを、磁性リボンを斜めに重ね合わせて構成した。このように磁路シートを構成することにより、磁性リボンの繋ぎ目近傍における、センサコイルの感度の変動を抑制することができる。したがって、位置指示器検出感度が高く、位置検出精度が高く、且つノイズに強い、高性能な位置検出装置を実現できる。
(もっと読む)
慣性駆動アクチュエータのキャリブレーション方法、慣性駆動アクチュエータ装置及び移動体の位置算出方法
【課題】移動体と電極との間の静電容量が、アクチュエータ組み立て後に異なる値を示すようになっても、適切な値に修正することができ、これにより移動体の絶対位置を確実かつ正確に算出することのできる慣性駆動アクチュエータ装置を提供する。
【解決手段】移動体電極と振動基板電極とが対向する部分の静電容量を、一方及び他方の移動限界位置において検出する静電容量検出ステップと、静電容量検出ステップにおいて検出された、一方及び他方の移動限界位置での静電容量を記憶する静電容量記憶ステップと、静電容量記憶ステップにおいて記憶された一方及び他方の移動限界位置での静電容量と、一方及び他方の移動限界位置間の移動限界距離と、の比率を算出する比率算出ステップと、算出した比率を用いて、一方及び他方の移動限界位置間における移動体の絶対位置を算出する絶対位置算出ステップと、を備える。
(もっと読む)
センサ信号検知回路
【課題】誤検出の虞を少なくしたセンサ信号検出装置を提供する。
【解決手段】ローパスフィルタ21は、高周波のノイズ成分S2及び直流レベル変動成分S3を遮断し、直流オフセット分S0及び低周波の状態変動成分S1を通過させる。変換回路22は、信号R1=K(S0+S1)(Kは定数)を出力する。選択回路23は、トリガ信号TGに従い、信号R1(=K(S0+S1))、又は変換回路25から得られる信号R2のいずれか一方を基準信号Rとして選択する。比較回路24は、信号Sと基準信号Rとを比較し、S<Rとなったらトリガ信号TGを立ち上げ、S>Rとなったらトリガ信号TGを立ち下げる。変換回路25は、時刻t1でトリガ信号TGの立ち上がりを検知した場合、その時刻t1での基準信号Rのサンプリング値Rt1を比較回路24から取り込み、係数mを乗算した信号R2=m・Rt1を出力する。
(もっと読む)
磁石位置測定方法および磁場測定装置
【課題】磁石の位置を正確に測定することが可能な磁石位置測定方法を提供する。
【解決手段】この磁石位置測定方法は、対象領域に適正な磁場を発生するように所定位置に配設される一対の略円筒状の超電導マグネット1A,1Bを備えたSi単結晶育成装置100における超電導マグネット1A,1Bの所定位置からのずれ量を求める方法である。そして、磁石位置測定方法は、Si単結晶育成装置100を作動させて、超電導マグネット1A,1Bの磁場強度を測定し、その実測データを取得する工程と、磁場強度の実測データと、超電導マグネット1A,1Bの所定位置からのずれ量として規定された未知数を含む磁場強度の2次関数式から得られる磁場強度のシミュレーションデータとから、未知数を求める工程とを備えている。
(もっと読む)
近接検出装置及びその方法
【課題】 物体の接近を電極の静電容量により検出近接センサーにおいて、比較的簡単な構成で、ノイズの影響を除去し、正確な位置検出を行うことの出来る近接検出装置を提供する。
【解決手段】 検出電極の充放電波形から基本発振成分と低周波ノイズ成分を除去して容量変化成分のみを抽出し、抽出された容量変化成分を内部発振に加えて、容量変化に依存した安定なの発振波形の周期から静電容量あるいはその変化を求めるようにした。
(もっと読む)
位置測定装置
【課題】 位置測定装置を構成する送信系コイルと受信系コイルのうち、送信系コイルを小さくする。
【解決手段】 位置測定装置は、第一の地点に配置された一軸の励磁コイル14と、該励磁コイルに交流信号を供給して励磁するための信号発生回路と、中心軸が互いに直交するようにして第二の地点に配置された第一、第二、第三の検出コイル21−1、21−2、21−3と、前記第一、第二、第三の検出コイルの出力から電圧信号を得る回路とを含む。前記励磁コイルを励磁した時に前記第一、第二、第三の検出コイルに誘起される誘起電圧を用いて予め定められた演算を行うことにより、前記検出コイルの座標系に対し前記励磁コイルの中心軸方向が既知であるとき前記第二の地点から前記第一の地点までの方位と距離を算出する。
(もっと読む)
多次元位置センサ
コントローラと、可動部と搬送経路とを有し前記コントローラと連通するワークピース搬送機と、前記可動部に固着した少なくとも1つの界生成プラテンと、搬送経路に沿って配置されコントローラと連通する少なくとも1つのセンサ群とを含み、前記界生成プラテンが位置計測とともに可動部を推進させるように構成される多次元測位装置とを備える装置であって、前記の少なくとも1つのセンサ群の各センサは、少なくとも1つの界生成プラテンで発生させる検知界内の単軸に沿ったばらつきに対応する1つのみの出力信号を提供するように構成され、前記コントローラは、前記の少なくとも1つのセンサ群の各センサに隣接した前記可動部の多次元位置を、前記の少なくとも1つのセンサ群内の少なくとも1つのセンサの前記1つのみの出力信号に基づいて、多次元位置には、少なくとも平面位置と、ワークピース搬送機と少なくとも1つの前記センサ群との間のギャップとを含めて算出するよう構成されている装置。 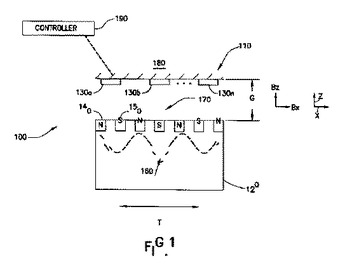 (もっと読む)
(もっと読む)
磁気検出方法およびその装置
【課題】実装ズレがあった場合に磁気検出の誤差を低減する、2次元平面上での磁気検出方法およびその装置を提供すること。
【解決手段】本発明に係る磁気検出方法の実施形態では、x軸上の1対のホール素子301、302の出力信号から算出される検出信号を、磁石のx座標の関数として直線補間して、傾きa、切片bを求める。次に、y軸上の1対のホール素子303、304の出力信号から算出される検出信号を、磁石のx座標の関数として直線補間して、傾きc、切片dを求める。次に、1対のホール素子301、302の出力信号から算出される検出信号を、磁石のy座標の関数として直線補間して、傾きe、切片fを求める。次に、1対のホール素子303、304の出力信号から算出される検出信号を、磁石のy座標の関数として直線補間して、傾きg、切片hを求める。これらのパラメータを用いて、予め定めた数式により磁石の検出位置を算出して磁気検出を行う。
(もっと読む)
変位センサ
【課題】変位体の変位に対する出力信号の直線性を向上させる。
【解決手段】発振回路3が、変位検出用コイル1のインダクタンス(L)に対応した周波数を有する発振信号を出力する。発振周期計測回路4が、発振回路3から出力された発振信号の周期を計測し、計測された周期に対応する信号を出力する。二乗回路5が、発振周期計測回路4から出力された信号の二乗値を演算出力する。発振信号の周期の二乗値を演算出力することにより、インダクタンス(L)成分と容量(C)成分の平方根成分がなくなり、出力信号は変位体の変位に対し直線的な関係で変化する信号となる。
(もっと読む)
回転軸の絶対回転角検出装置
【課題】二つ以上の相対角センサの検出信号を利用し、簡単かつ高精度に回転軸の絶対回転角を検出する。
【解決手段】回転軸12の二つの相対角センサ20P、20Q及び電動モータ22の相対角センサ24から得られる電気角信号Sp、Sq、Srに基づき、角度信号平滑化手段32において、絶対回転角信号Abを求める。この際、角度信号平滑化手段32で得られる絶対回転角信号の所望の周期的変動数Sと、減速機26の減速比a:bと、二つの相対角センサ20P、20Qの軸倍角p、qと、電動モータ22の相対角センサ24の軸倍角rと、回転軸12の許容回転数Nとが、各相対角センサの軸倍角の如何に関わらず、S=|(p+q)×N−r×N×(a/b)|=1の関係を満たすように各値を設定することで、絶対回転角信号Abは回転軸12の絶対回転角と一対一の対応となる。
(もっと読む)
1 - 20 / 32
[ Back to top ]