
Fターム[2F065AA01]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 位置;移動量 (12,734)
Fターム[2F065AA01]の下位に属するFターム
Fターム[2F065AA01]に分類される特許
41 - 60 / 613
画像センサのチルトを求めるための方法
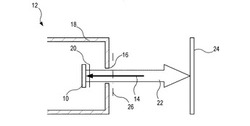
【課題】カメラに取り付けられた画像センサのチルトを求めるための、改善された方法を提供する。
【解決手段】カメラ12における画像センサ10表面の、カメラ12のレンズ基準面26に対するチルトを求めるための方法であり、画像センサ10に光を送るステップと、画像センサ10から反射した光を受けるステップと、反射光における干渉パターンを特定するステップと、干渉パターンの特徴を特定するステップと、干渉パターンにおいて特定された特徴の位置に基づいて画像センサ10表面のチルトを求めるステップとを含む。
(もっと読む)
ライト検出装置、ライト検出プログラム、およびライト制御装置

【課題】撮像画像中から他車両のライトを検出するライト検出装置において、車両のライトに類似する特徴を有する光源を識別し、車両のライトを良好に検出する。
【解決手段】ライト制御システム1においては、自車両の周囲を撮像した撮像画像を取得し(S110)、撮像画像中の光源を抽出する(S120)。そして撮像画像中を複数に区分した領域毎に他車両が存在する確度が設定された領域確度マップに基づいて、該光源毎に光源が他車両のライトである確度を表す領域確度を演算する(S150)。また各光源における形状を含む特徴量が車両のライトが有する特徴量と一致する確度に応じて、各光源が他車両のライトである確度を表す特徴確度を演算し(S150)、各光源に対して領域確度および特徴確度に基づく最終確度を演算し、予め設定された閾値以上となる最終確度を有する光源が他車両のライトである旨を出力する(S150,S190)。
(もっと読む)
位置計測装置、それを用いた被加工物の製造方法および成形品
【課題】ワークディスタンスが変化しても計測可能な位置計測装置でかつ、高分解能化可能な位置計測装置を提供する。
【解決手段】目盛部30を、第1及び第2反射面31,32の相対距離が周期的に変化するように構成し、受光センサ14によって、これら第1及び第2反射面31,32に反射された光によって形成された干渉光の光強度を計測する。この干渉光の光強度の周期変化を演算部20によって位置情報に演算することにより、ワークディスタンスの変化に係わらず計測対照の位置を計測する。
(もっと読む)
モノスペクトル・マーカならびにその検出方法および装置
【目的】動きぶれや焦点ぼけがある画像からでも抽出することができるモノスペクトル・マーカを提供する。
【構成】HSV色空間により表現される。モノスペクトル・マーカでは位置セグメントSp1,Sp2,Sp3,Sp4とIDセグメントSd1,Sd2,Sd3,Sd4,Sd5が黒の境界領域BD内に配置される。位置セグメントのVの値はその中心でピークを示し,中心を通るすべての方向において単一周波数で変化する。位置セグメントとIDセグメントのHの値は特定の色相を表わす。
(もっと読む)
位置検出装置、位置検出方法及びコンピュータプログラム
【課題】検出対象の位置を精度良く検出する位置検出装置を提供する。
【解決手段】所定の位置で所定の向きに設置された撮像装置によって撮像された第一の画像から、検出対象に含まれる第一特徴点eye_2l及び第二特徴点eye_2rの平面座標の位置を検出し、第一特徴点及び第二特徴点の空間座標の位置を取得し、第一特徴点と第二特徴点との間の平面座標における距離と空間座標における距離との比を算出し、撮像装置によって撮像された第二の画像から、検出対象に含まれる第一特徴点及び第二特徴点の平面座標の位置を検出し、距離比と、第二の画像における第一特徴点及び第二特徴点の平面座標と、に基づいて第一特徴点及び第二特徴点の空間座標の位置を検出する。
(もっと読む)
情報処理装置及び情報処理方法
【課題】 計測対象物体からの反射光を用いて3次元計測を行う手法において、計測の誤差に起因する、計測対象物体の3次元位置の取得精度の低下を防止することを目的とする。
【解決手段】 構造化光が投影された計測対象物体からの反射光の情報と、前記構造化光の光源の位置と、前記反射光を受光して前記反射光の情報を取得する受光部の位置とを用いた三角法により、前記計測対象物体の表面の複数の位置を取得する第一の取得手段と、前記複数の位置に基づき、前記計測対象物体の表面の位置および向きを取得する第二の取得手段と、前記複数の位置を取得する際の計測の誤差に関する情報と、前記計測対象物体の表面の位置および向きとに基づき、前記複数の位置の少なくとも一つを補正する補正手段と、を有することを特徴とする。
(もっと読む)
基板処理装置、基板処理方法及びその基板処理方法を実行させるためのプログラムを記録した記憶媒体
【課題】基板の膜種、表面状態等に影響されることなく、基板の保持状態を正確に検出することができる基板処理装置を提供する。
【解決手段】基板を処理する基板処理装置において、基板が載置される載置台32と、載置台32に載置されている基板の周縁部を保持する保持部44と、保持部44に光を照射する光源98と、保持部44からの光の光量を検出することによって、保持部に保持されている基板の保持状態を検出する検出部99とを有する。
(もっと読む)
農産物の体積測定装置
【課題】農産物の体積を高速且つ高精度に測定できるようにする。
【解決手段】塊状の測定対象農産物7の表面上に設定方向に延びる線状の輝線6を形成する光線を照射する光線投射手段2と、輝線6を撮像する撮像手段1と、輝線6を、測定対象農産物7上で、輝線6の方向と交差する方向に移動させる輝線移動手段BMとが備えられて農産物の体積測定装置が構成され、移動される輝線6の移動途中の各位置において、輝線6の位置情報によって得られる測定対象農産物7の外形形状と、測定対象農産物7上の輝線の両端位置の夫々から前記光線の入射側と反対側へ伸ばした線を測定対象農産物7の外形形状とみなしたみなし外形形状とに基づいて特定される面積の少なくとも一部に対して補正係数を乗算することによって補正し、前記移動途中の各位置での補正後の面積に基づいて測定対象農産物7の体積を求める。
(もっと読む)
鉄筋領域抽出装置、鉄筋領域抽出方法及び鉄筋領域抽出プログラム
【課題】簡単に精度よく鉄筋の配筋情報を取得する。
【解決手段】配筋情報取得システム1において、携帯端末4は、背景バーBの部分に相当する画像全体から、マーカMK1及びMK2を検出する(S901)。次に、マーカMK1と、MK2との間にある画像を切り出す(S902)。その画像において、鉄筋の軸方向に垂直な方向で、ピクセルの輝度が不連続な箇所を検出することにより、領域の境界線となるエッジを抽出する(S903)。続いて、抽出されたエッジのうち、不要なエッジを除去する(S904)。次に、画像の輝度分布に対して度数分布を作成し、その度数分布に基づいて鉄筋、影、背景の3つの領域における代表輝度値を計算し、各代表輝度値を用いて、各エッジに挟まれた領域をいずれかに特定する(S905)。さらに、特定した領域のうち、エッジを挟んで隣り合う領域が同じである場合、その2つの領域を1つの領域として統合する(S906)。
(もっと読む)
ツインロータリ圧縮機の中間プレートの検査装置
【課題】単品状態および圧縮部に組み込まれた状態における分割面の隙間を測定することができるツインロータリ圧縮機の中間プレートの検査装置を提供する。
【解決手段】検査装置は、単品の中間プレート5の分割面同士を突き合わせるための右スライドシリンダ47a等、突き合わせられた分割面隙間Cを測定するためのLED光源27および画像センサ36、中間プレート5の外径を測定するためのリニアセンサ61等を具備する第一検査装置100と、組み込まれた状態の中間プレート5の分割面同士を突き合わせて、中間プレート5の外径を測定するための第二検査装置200と、第一検査装置100が測定した分割面隙間Cが無い状態における中間プレート5の外径である単体隙間合計値E5と、第二検査装置200が測定した中間プレート5の外径である組立隙間合計値E15とを比較する制御装置300と、を有する。
(もっと読む)
変位量特定装置、変位量特定方法および変位量特定プログラム
【課題】基板の反りを簡易に検出することができる技術の提供。
【解決手段】電子部品を基板に実装するためのパッドの中から前記基板の反りを検出するための基準パッドを選択し、前記基板に反りが発生していない場合の前記基板の表面である基準平面に対して傾斜した方向に光軸が配向したカメラによって撮影された前記基準パッドの像を含む画像を取得し、前記基準パッドの像の前記画像内での位置と前記基板に反りが発生していない場合における前記基準パッドの像の前記画像内での位置である基準位置とに基づいて前記基準平面に垂直な方向への前記基板の反りの量を特定する。
(もっと読む)
光センサ、及び、その製造方法
【課題】光の左右比の検出精度の低下が抑制された光センサ、及び、その製造方法を提供する。
【解決手段】半導体基板(10)に受光素子(20)が形成され、受光素子(20)の形成面(10a)上に、透光膜(30)を介して遮光膜(40)が形成され、遮光膜(40)に透光用の開口部(50)が形成された光センサであって、仮想直線(VL)を介して線対称の関係にある一対の受光素子(21,22)及び一対の開口部(51,52)を有し、形成面(10a)に直交する高さ方向に沿う光を、開口部(51,52)を介して受光素子(21,22)に照射した際に、一対の受光素子(21,22)から出力される出力信号に基づいて、高さ方向に沿う光が開口部(51,52)を介して受光素子(21,22)に入射した際に出力される一対の受光素子(21,22)の出力信号が互いに一致するように、各出力信号を補正する。
(もっと読む)
平面度測定装置
【課題】シャック−ハルトマンの波面センサを用いた平面度測定装置において、測定精度及び領域分解能を向上させる。
【解決手段】平行化が可能な光束である一次光束B1を射出する光源1と、前記光源1から射出された一次光束B1を前記測定対象領域ARに導いて反射させ、その反射した光束である二次光束B2を、平面状の波頭を有する光束として出力する導光手段2と、前記導光手段2から出力された二次光束B2と直交するように設けられたレンズアレイ3と、前記レンズアレイ3を構成する各レンズの入射側光軸上に設けられて、各レンズに入射する光径をレンズの径よりもそれぞれ小さくするアパーチャ部材4と、前記レンズアレイ3を通ってレンズ毎に分離された光である分離光Dを検出する光検出手段5と、前記光検出手段5で得られた各分離光Dの位置又は傾きに基づいて、前記測定対象領域ARの平面度に係る値を算出する平面度算出部6とを設けるようにした。
(もっと読む)
測定装置
【課題】対象物の位置を高精度に測定する測定装置を低コストで提供する。
【解決手段】第1周波数で変調された基準光P1から基準信号を取得し、第1周波数での変調に加えて対象物の移動に起因して第2周波数で変調された測定光P2から測定信号を取得し、第2周波数をfdとして、測定信号を第1周波数で復調することによって第2周波数の周期誤差成分及び高調波成分を含む信号を生成する復調部と、復調部で生成された信号から高調波成分を除去して第2周波数の成分及び周期誤差成分を含む信号を出力するデシメーションフィルタ30,50と、デシメーションフィルタから出力された信号に含まれる周期誤差成分を検出する検出部と、デシメーションフィルタから出力された信号から検出部により検出された周期誤差成分を除去して第2周波数の成分の信号を出力する除去部と、除去部から出力された信号に基づいて対象物の位置を演算する演算部60,70とを備える。
(もっと読む)
波長走査干渉計
【課題】移動する被検体までの絶対距離を高精度に計測する。
【解決手段】第1光源からの第1光束によって形成される被検体の位置情報を含む第1干渉信号と、第2光源からの第2光束によって形成される前記被検体の位置情報を含む第2干渉信号と、前記第1光束の波長を走査しながらの前記第1干渉信号と前記第2光束の波長を走査しながらの前記第2干渉信号とに基づいて前記被検体までの絶対距離を算出する処理部とを備え、前記処理部は第1時刻から第2時刻までの時間間隔における前記第1干渉信号の位相と前記第2干渉信号の位相との差分の変化量によって得られる前記被検体の速度によって、前記第1干渉信号および前記第2干渉信号の少なくとも一方に基づいて算出される誤差を有する絶対距離を補正し、誤差が補正された絶対距離を算出する。前記第1時刻および前記第2時刻は前記第1光束の波長と前記第2光束の波長との差分が互いに等しい時刻である。
(もっと読む)
面形状計測装置
【課題】被検面の形状を高精度に計測する。
【解決手段】被検面10の形状を計測する面形状計測装置であって、光源1からの光を参照光と被検光とに分割して被検光を被検面10に照射する計測ヘッド110と、計測ヘッド110を収納する収納部と、光源1からの光を計測ヘッド110へ入射させ、被検面10に対する被検光の入射角度を変える変更部120と、被検面10で反射され計測ヘッド110に戻ってくる被検光と参照光との干渉光を検出する検出部と、計測ヘッド110の位置を計測する位置計測部116−118と、検出結果および計測結果を用いて被検面10の形状を求める処理部9とを備え、変更部120は、光源1からの光を計測ヘッド110の収納部の外側から計測ヘッド110に入射させ、光源1からの光が計測ヘッド110に入射する位置を変えることによって入射角度を変える。
(もっと読む)
形状測定装置
【課題】帯状体の顕在化形状を、幅方向の分解能を高めて検出可能な形状測定装置を提供する。
【解決手段】被測定物体1の搬送方向に平行な直線と垂直の平面内に配置され、平面内の被測定物体1表面の幅方向へスリット状の光を照射するスリット光光源2と、平面と垂直な平面でかつ被測定物体1の表面に垂直な平面を介してスリット光光源2と反対側に配置され、被測定物体1上のスリット状の光を撮像する撮像装置3とを備えた。また、被測定物体1の幅方向に沿い被測定物体1に外力を印加する外力印加装置14を設け、潜在形状演算器40を備えた。
(もっと読む)
測距方法及びレーザ測距装置
【課題】レーザ光の特徴である可干渉性を利用しながら、光学系に機械的手段を用いずに被測定物の厚み方向の距離もしくは厚みを高精度に測距する測距方法及びレーザ測距装置を提供する。
【解決手段】反射部14を階段状とすることで、測定光と参照光との光路差が段差の間隔で連続的に変化する光強度データ列を得ることができる。そして、この光強度データ列をフーリエ変換することで各干渉光の明部の位置を取得し、第1レーザ光に基づく干渉光の明部の位置と第2レーザ光に基づく干渉光の明部の位置とが一致する第1位置と第2位置とに基づいて測距を行う。よって、光学系に機械的手段を用いずに被測定物6の厚み方向の距離Lもしくは厚みを高精度に測距することができる。
(もっと読む)
検出装置、移動体装置、パターン形成装置及びパターン形成方法、露光装置、及びデバイス製造方法
【課題】高精度なウエハステージの移動制御を行う。
【解決手段】ウエハステージの位置を計測するために用いられるスケール39Y2に対して検出装置PDY1の照射系69Aからの検出ビームを照射し、スケール39Y2を介した検出ビームを受光系69Bで検出することにより、スケールの表面状態(異物の存在状態)を検出する。これにより、スケールに対して非接触で表面状態の検出を行うことができる。さらに、この表面状態を考慮することで、ウエハステージの移動制御を高精度に行うことができる。
(もっと読む)
受光装置
【課題】ラインイメージセンサーと同等の機能を有する比較的安価な受光装置を提供する。
【解決手段】所定の波長域に渡り分光された光の波長を検出する受光装置10であって、ホトデテクター142と、ホトデテクター142に入光する光を規制する開孔143aを有するマスク143を備えた受光手段14と、光を波長域に渡り分光した回折光を受光手段14に向ける回折格子11と、回折格子11を作動し波長域に渡り分光した回折光を選択的に該マスク143の開孔143aに位置付ける作動手段12と、回折格子11の作動位置を検出する位置検出手段13とを具備している。
(もっと読む)
41 - 60 / 613
[ Back to top ]