
Fターム[2F065AA01]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 位置;移動量 (12,734)
Fターム[2F065AA01]の下位に属するFターム
Fターム[2F065AA01]に分類される特許
161 - 180 / 613
マシンビジョン検査システムでのステップアンドリピート動作プログラミングのためのGUI
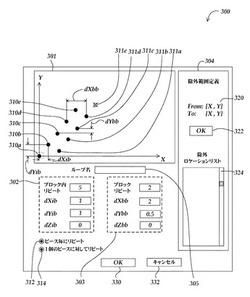
【課題】マシンビジョン検査システムでのプログラミングステップアンドリピート動作のためのGUIを提供する。
【解決手段】マシンビジョン検査システムは、撮像部と、撮像部の視野内に1つまたは複数のワークピースを保持するステージと、制御部と、グラフィカルユーザインタフェース(GUI)とを含む。ユーザは、マシンビジョン検査システムを操作して、ワークピース特徴の第1の構成に対して実行すべき検査動作セットを定義する。GUIも操作して、ステップアンドリピートダイアログボックス300を表示させ、定義された検査動作セットを実行するデフォルトステップアンドリピートロケーションセットを定義する第1の複数のパラメータを定義する。さらに定義されたデフォルトステップアンドリピートロケーションセットのサブセットである、検査動作を実際に実行すべき検査ステップアンドリピートロケーションセットを定義する。
(もっと読む)
光波干渉計測装置

【課題】一般の湿潤環境に適用可能な屈折率補正機能を有する光波干渉計測装置を提供する。
【解決手段】光波干渉によって参照光路と被検光路の幾何学的距離差を計測する計測装置であって、測長用光源からの光であって参照面で反射した光と被検面で反射された光の干渉信号の位相を検出する位相検出部と、前記測長用光源の波長とは異なる非測長用光源からの光であって前記参照面で反射した光と前記被検面で反射された光の強度を検出する強度検出部と、前記位相と前記測長用光源の波長から算出される光路長と、前記非測長用光源の光の強度情報から算出される前記被検面と前記参照面の間の水蒸気圧分布の平均値とから前記幾何学的距離を算出する解析部を有することを特徴とする。
(もっと読む)
低密度の反射対応から鏡面物体の表面を再構築するための方法
【課題】低密度の反射対応から鏡面を再構築する。
【解決手段】点対応手順が鏡面物体203の画像のセットに適用され、低密度の反射対応が生成される(210)。画像のセットは、カメラ202によって取得される間、回転を受ける。すなわち、カメラ202、環境、又は物体203のいずれかが回転する。線形系AΘ=0が解かれる(220)か、又は関連する二次錐計画(SOCP)が解かれる。ここで、Θは局所表面パラメーターのベクトルである。表面の勾配は局所二次曲面パラメーターから得られ(230)、勾配は法線を得るために統合される(240)。ここで法線は表面の形状を定義する。
(もっと読む)
視覚検査システム
【課題】ワークに対してカメラを任意の位置、姿勢に移動させながら視覚検査を行うことができるものであって、設備全体の小型化を図る。
【解決手段】支持台2上にYZロボット3を設け、その前方に回転テーブル4を設ける。YZロボット3は、Z軸移動機構5、Y軸移動機構6、前後(Y軸)方向に延びる光軸Oを有しワークWを撮影するカメラ7を備え、カメラ7を前後(Y軸)及び上下(Z軸)方向に自在に移動させる。回転テーブル4は、ワークWを載置し、垂直方向に延びる回転軸θ周りに自在に回転させる。カメラ7の先端に180度以上の画角を有する超広角レンズ10を設ける。
(もっと読む)
対象物識別装置
【課題】対象物が遠行状態にある場合においても正確に目標を識別することが出来る信頼性の高い対象物識別装置を提供する。
【解決手段】複数の波長帯の画像データ(長波長赤外線画像データ、中波長赤外線画像データ)に基づいて信号が得られていない領域や信号強度が飽和してしまっている領域の情報を補間することができるため詳細な温度状態を観察することができる。また、フレア発出途中過程において対象物とフレアの像に重なりが生じる場合であっても、適切に対象物を識別および検出することができる。従って、対象物の識別性能が向上し、信頼性の高い対象物識別装置。
(もっと読む)
対向する回転軸を具備した加工機の測定装置および測定方法
【課題】加工機に設けられた対向する2つの回転軸間のスラスト方向における相対変位を、正確にかつ容易に算出することができる測定装置および測定方法を提供する。
【解決手段】互いに平行に支持された一対の回転軸3A、3Bと、該一対の回転軸3A、3Bの対向する所定位置にそれぞれ少なくとも一対の固定具を固定できる工具固定手段とを具備した加工機において、同一の板厚で非円板形状に形成された一対のゲージ部材11A、11Bを回転軸3A、3Bの基準面から軸方向に同距離の測定位置に固定し、一対のゲージ部材11A、11Bの互いの回転位相を一定角度ずらした状態を維持しつつ一対の回転軸を同一速度で回転するとともに、該一対の回転軸3A、3Bと一体に回転している一対のゲージ部材11A、11Bのスラスト方向位置を非接触式センサ13によって検出する。
(もっと読む)
たわみ計測装置、ならびにたわみおよび軸ねじれ計測装置
【課題】簡単かつ安価に回転軸体の軸線方向に直角な方向のたわみ量や軸ねじれを非接触にて測定できる計測装置を提供する。
【解決手段】被計測物である回転軸体10の外周面に設けられてその回転とともに回転運動するターゲット体11a、11bによって前記回転軸体10の軸線方向に略平行に照射される発光部3からの光線の光路を周期的に横切らせ、当該ターゲット体11a、11bにより遮光されない光線または反射光を受光・演算表示部4で受光するようにしておき、前記回転軸体10のたわみ変形に起因する前記ターゲット体11a、11bの被照射面における前記光線の照射位置の変化を検出し、当該検出結果に基づいて前記回転軸体10のたわみ量を計測するようにした。
(もっと読む)
軸振れ計測装置
【課題】 簡単かつ安価に回転軸体の軸線方向、径方向の軸振れ量を非接触にて測定できる軸振れ計測装置を提供する。
【解決手段】 幅変化部を有し、被計測対象である回転軸体またはこれとは同心の大径円筒状体の外周面にその軸線方向と前記一方向とが平行になるように配置されて当該回転軸体とともに回転運動する平行ターゲット体と、前記幅変化部に向けた光線照射源としての発光部と、回転中の前記幅変化部からの反射光またはこれを透過する透過光を受光して受光時間の変化を検出し、この検出結果に基づいて前記回転軸体の軸線方向における軸振れ量を計測する受光・演算表示部とを含む軸振れ計測装置。さらに、幅変化部を有し、前記回転軸体の外周面からその径方向と前記一方向とが平行になるように当該外周面に外側に向けて立設された直立ターゲット体を備えることができる。
(もっと読む)
検査装置および検査方法
【課題】光学的な測定を行うための照射部および受光部がそれぞれ最小個数でありながらも、被検査基板の測定対象物の光学的な測定を精度良く行うことが可能な検査装置および検査方法を提供する。
【解決手段】レーザー計測器33はレーザー光を照射する照射部33aと測定対象物111で反射された反射光を受光する受光部33bを有し、シャフト333の下端に取り付けられている。シャフト333にはベルト335を介してモータ331の回転駆動力が伝達されるように構成されており、レーザー計測器33はモータ331の回転により向きを変更可能に構成されている。これによって、測定対象物111から見たレーザー光の入射経路L1と反射光の反射経路L2との入受光関係が調整可能になっている。
(もっと読む)
光学式位置検出装置
【課題】2つの空間に位置する対象物体の各々の位置を検出することのできる光学式位置検出装置を提供すること。
【解決手段】光学式位置検出装置10には、Z軸方向の一方側Z1に向けて位置検出用光源12が配置され、Z軸方向の一方側Z1に受光部310、320を向けた第1光検出器31および第2光検出器32がZ軸方向で離間した位置に配置されている。第1光検出器31での受光結果から第2光検出器32での受光結果を差し引く等、第1光検出器31での受光結果に対して第2光検出器32での受光結果分を補正すれば、第1空間10R1に位置する対象物体Ob1で反射した検出光の強度を導出することができ、かかる強度の導出結果を利用すれば、第1空間10R1に位置する対象物体Ob1の位置を導出することができる。また、第2光検出器32での受光結果に基づいて第2空間10R2に位置する対象物体Ob2の位置を導出することができる。
(もっと読む)
CCDカメラ用標識体
【課題】汚損が進行しても、CCDカメラでの濃淡の判別に支障が生じることを抑制することが可能で、CCDカメラで取得する撮像データの信頼性を高めることができ、システムの誤動作や不良品の発生を防止できると共に、メンテナンスも軽減することができ、位置検出対象である装置の稼働率の低下を防止して生産性を向上することができるCCDカメラ用標識体を提供する。
【解決手段】位置検出対象の位置情報を取得するためにCCDカメラで撮像されるCCDカメラ用標識体1であって、位置検出対象に設置される標識体本体8と、標識体本体にその表面部8aから内奥へ向かって形成される真直穴9と、標識体本体に真直穴と連接して形成され、CCDカメラの光軸Xに対して傾斜する傾斜反射面10aを有して、真直穴に進入した光x1を減衰させるテーパ状凹部10と、標識体本体の表面部に、真直穴の開口部を取り囲んで形成された光反射面12とを備えた。
(もっと読む)
基準位置算出システム、および基準位置算出方法
【課題】撮像装置によって撮像された熱画像において基準に用いられる位置の画像座標系における座標値を高い精度で算出することができる基準位置算出システムを提供する。
【解決手段】反射部材51が、遠赤外線を反射する。熱源52が、放射した遠赤外線が反射部材51によって反射される位置に設置される。撮像装置70が、位置測定用装置50を撮像した熱画像を画像処理装置60に出力する。座標値算出手段61が、撮像装置70が出力した熱画像において、単位面積当たりの遠赤外線の強度が所定の値以上である領域の中心の画素の画像座標系における座標値を算出する。
(もっと読む)
車載カメラのカメラキャリブレーション装置
【課題】車載カメラの内部パラメータと外部パラメータの情報を、専用のカメラキャリブレーション用パターンなどを用いずに簡便に求める。
【解決手段】コントローラ10は、車載カメラ1から、白線を含む道路の入力画像を取得し、複数の異なるレンズ歪みパラメータに基づいて入力画像を補正して第1の補正画像をそれぞれ生成し、各第1の補正画像において、各白線に対応する直線を検出し、直線検出結果に基づいて、補正の妥当性を評価するための評価値を計算し、最良の評価値に対応するレンズ歪みパラメータを決定し、決定されたレンズ歪みパラメータに基づいて入力画像から補正された第2の補正画像を生成し、第2の補正画像において、各白線に対応する2本の直線を検出し、検出された2本の直線の交点を消失点位置として決定する。
(もっと読む)
反射型光学センサおよび画像形成装置
【課題】トナーパターンのトナー濃度や位置を、より高精度に検出できる反射型光学センサを提供する。
【解決手段】発光部E1〜E9を配列した照明系と、受光部D1〜D9を配列された受光系と、共に平凸形状の照射用マイクロレンズアレイLE1〜LE9および受光用マイクロレンズアレイLD1〜LD9とを有し、照射用マイクロレンズの光軸は、対応する発光部E1〜E9の中心を通り発光部に垂直な発光部軸に平行で、この発光部軸に対して受光系側へ所定距離ずれ、各受光用マイクロレンズLD1〜LD9の光軸は、対応する受光部の中心を通り受光部に垂直な受光部軸に対して平行で、受光部軸に対して、照明系に近づく側もしくは遠ざかる側にずれており、照射用マイクロレンズと受光用マイクロレンズとは、レンズ面積、レンズ面曲率半径、レンズ肉厚が、何れも互いに異なり、受光用マイクロレンズのレンズ面積が照射用マイクロレンズのレンズ面積より大きい。
(もっと読む)
車両周辺監視装置
【課題】ピッチ検出器を用いることなく、単眼カメラによる構成においてもピッチング補正を行うことができる機能を備えた車両周辺監視装置を提供する。
【解決手段】今回の制御周期における撮像画像と前回の制御周期における撮像画像間の位相相関関数を求めて、該位相相関関数を逆フーリエ変換した関数において実部の大きさが最大となる複素数要素の位置に基づいて、今回の制御周期での撮像画像の前回の制御周期での撮像画像からの変位量を算出し、該変位量を用いて車両の挙動に起因する撮像画像の変位分を相殺するためのピッチング補正値PYを算出するピッチング補正値算出部12と、今回の撮像画像に対して、ピッチング補正値PYによる位置補正を行った補正画像f3を生成する補正画像生成部13と、補正画像f3から対象物を検出する対象物検出部14とを備える。
(もっと読む)
光波干渉計測装置
【課題】簡易な構成で高速に絶対距離計測が可能な光波干渉計測装置を提供する。
【解決手段】光波干渉計測装置は、第1基準波長λ1と第2基準波長λ2との間で周期的に波長走査をして光束を射出する波長可変レーザと、第3基準波長λ3の光束を射出する波長固定レーザと、前記波長可変レーザおよび前記波長固定レーザから射出した光束を参照光束および被検光束に分割する光束分割素子と、前記参照光束を反射する参照面と、前記被検光束を反射する被検面と、前記参照光束と前記被検光束との干渉信号から位相を検出する位相検出部と、第3基準波長λ3、第1合成波長Λ12、第2合成波長Λ13、波長走査の際の位相変化量の整数成分、および、第1合成波長と第2合成波長の干渉次数から逐次的に第3基準波長λ3の干渉次数を決定し、被検面と参照面との間の絶対距離を算出する解析装置とを有する。
(もっと読む)
校正システムを有するパターン発生器
パターン発生器は、書込ツールと校正システムとを有する。書込ツールは、ステージ上に配列されたワークピース上にパターンを発生させるように構成される。校正システムは、書込ツールの座標系と、ステージおよびワークピースのうちの1つ上の校正プレートの座標系との間の相関を決定するように構成される。校正システムはまた、校正プレートの表面上の少なくとも1つの反射パターンから反射した少なくとも1つの光ビーム状の光相関信号、またはパターンに少なくとも部分的に基づき相関を決定するように構成される。 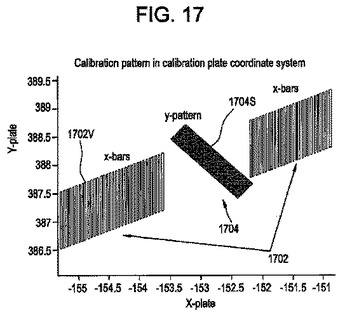 (もっと読む)
(もっと読む)
認識装置及びその制御方法、コンピュータプログラム
【課題】 照明変動が存在する環境においても対象物認識をより安定的に行うための技術を提供する。
【解決手段】 対象物の位置姿勢を認識する認識装置は、所定の照明条件で撮像装置により撮像された対象物の撮像画像を入力し、撮像画像を解析して画像中の複数の特徴部分を決定し、当該複数の特徴部分における画像の特性をそれぞれ示す複数の特徴量を抽出し、対象物上の複数の特徴部分のそれぞれにおける物理的性質を示す性質情報を入力し、撮像画像の撮像時における照明条件を示す照明情報を入力し、性質情報が示す物理的性質と、照明情報が示す照明条件とに基づいて、抽出した複数の特徴量の各々の重要度を決定し、複数の特徴量をその重要度で重み付けしたものに基づいて、対象物の位置姿勢を認識する。
(もっと読む)
ファブリペロー干渉計を利用して位置を取得する装置
【課題】ファブリペロー干渉計を利用して位置を取得する装置及び方法の提供。
【解決手段】位置を取得する装置は、共焦点ファブリペロー干渉計200を有する。
(もっと読む)
パターンアライメントを行うための方法および装置
ダイが載置されたワークピースを直描書き込みマシン内においてパターニングする方法。前記ダイの配置および配向の位置の測定データと、前記書込器座標系に相対する前記ワークピースの配置および配向とを用いて、前記直描書き込みマシンの座標系内に規定された変換位置への前記測定された位置の変換を決定する。選択されたダイまたはダイ群と関連付けられたパターンデータを、調節された回路パターンデータに変換する。前記変換は、前記元々のパターンデータと、前記変換された位置との双方に基づいて行われる。前記調節された回路パターンデータは、前記調節された回路パターンが前記ワークピース領域の複数の小領域に適合するように前記複数のダイまたはダイ群の回路パターンを表す。前記ワークピース上に分配された前記複数のダイ間のダイまたはダイ群と各小領域が関連付けられる。その後、前記調節された回路パターンデータに従って、前記ワークピース上にパターンを書き込む。 (もっと読む)
161 - 180 / 613
[ Back to top ]