
Fターム[2F065AA06]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 位置;移動量 (12,734) | 光軸方向;距離 (1,861)
Fターム[2F065AA06]に分類される特許
21 - 40 / 1,861
物品の3次元位置姿勢の認識装置及び認識方法
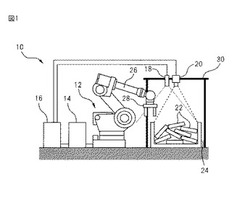
【課題】製造現場で使われる汎用的な組み込み装置でも実施できるような、少ない計算コストで物品の3次元位置姿勢を認識できる認識装置及び認識方法の提供。
【解決手段】カメラ20で複数の物品22がバラ積みされた領域全体の2次元画像を取得し、レンジセンサ18でカメラ20と略同じ領域の3次元情報を取得する。取得した3次元情報から、取り出すべき物品が存在するであろう空間を対象空間として大まかに限定し、該対象空間に基づいて2次元画像処理で物品を探索するための探索条件を設定し、該探索条件に基づいて物品の画像上での2次元位置情報を取得する。次に該2次元位置情報を用いて、物品の3次元位置姿勢の認識に使用する3次元点データを選定し、カメラ20の焦点から該物品に向かう3次元空間上の視線を計算し、該3次元点データと視線とに基づいて物品の3次元の位置姿勢を計算する。
(もっと読む)
計測装置

【課題】コストの増加を抑えながら参照面と被検面との間の光路長差の変化に起因する計測誤差を低減し、参照面と被検面との間の距離を計測する計測装置を提供する。
【解決手段】周波数を走査可能なn(n=2以上の整数)個の光源と、前記n個の光源からのそれぞれの光を分割し、参照面と被検面とに入射させる分割素子と、前記参照面で反射された光と、前記被検面で反射された光との干渉により形成されるn個の干渉光を検出して干渉信号を出力する検出部と、前記距離を求める処理部と、前記処理部は、前記n個の光源のうち1つの第1光源からの光の周波数を第1方向に第1走査速度で走査するように制御し、且つ、前記n個の光源のうち他の1つの第2光源からの光の周波数を第1方向とは逆の第2方向に前記第1走査速度とは異なる第2走査速度で走査するように制御し、前記n個の光源を制御している間の前記干渉信号に基づいて、前記距離を求める。
(もっと読む)
厚み測定方法、厚み測定装置、および厚み測定システム
【課題】立体構造を有する物体の厚み分布を、短時間に、かつ容易に測定する。
【解決手段】厚み測定方法は、測定対象物6に光を照射する光照射工程(S1)と、測定対象物6に照射された光が、測定対象物6を透過しているときに、測定対象物6への光の照射方向とは異なる所定の方向から、測定対象物6を撮像する撮像工程(S2)と、その撮像画像に基づいて、測定対象物6の厚み分布を測定する測定工程(S3)と、を含む。
(もっと読む)
撮像装置、撮像方法、及びプログラム
【課題】被写体までの距離とともに、被写体の肌領域を精度良く算出する。
【解決手段】第1のLEDは、被写体に対して、第1の波長の光を照射し、第2のLEDは、被写体に対して、第1の波長とは異なる第2の波長の光を照射し、距離画像センサは、被写体からの反射光を受光する。そして、肌検出部は、被写体からの反射光として第1の波長の光が受光されることにより得られる第1の画像と、被写体からの反射光として第2の波長の光が受光されることにより得られる第2の画像に基づいて、被写体の肌を表す肌領域を検出し、距離画像センサは、第1の波長の光が被写体に照射されたときから、被写体からの反射光として受光されるまでの第1の往復時間を算出し、算出した第1の往復時間に基づいて、被写体までの距離を算出する。本開示は、例えば、被写体の撮像により、距離画像を生成する撮像装置等に適用できる。
(もっと読む)
高さ測定装置及び高さ測定方法
【課題】鏡面性を持つ試料の各位置の高さを正確に求めることができる技術を提供する。
【解決手段】撮像部2は、例えば所定のフレームレートで、試料Sの画像である試料画像を撮像する。輝線抽出部は、撮像部2により順次に撮像された試料画像から輝線を抽出し、所定の基準高さ及び基準傾きを示す基準輝線に対する各輝線のずれw(x)を求める。高さ算出部は、w(x)=2L・(d/dx)・d(x)+2sinθ・d(x)に、輝線抽出部により抽出された輝線のずれw(x)を代入することで、基準高さからの試料Sの高さd(x)を順次に算出する。
(もっと読む)
画像測定装置
【課題】簡単な構造で容易に対象エリア、又は測定対象の画像が取得できると共に対象エリアの測定が行える画像測定装置を提供する。
【解決手段】投光光軸26と照明光29を射出する光源27とを有し、前記投光光軸を経て前記照明光を投射する投光光学系5と、受光光軸15と撮像素子13とを有し、測定対象からの再帰反射光29′を前記受光光軸を経て撮像素子で受光する受光光学系6と、前記撮像素子で撮像されたデータを処理する制御演算装置7とを具備し、前記投光光学系は前記投光光軸を測定対象に向け前記照明光を投射する投光ユニット25と、該投光ユニットを高低方向、水平方向に回転し、前記照明光の投射角を変更する投射角変更手段23,33と、前記受光光軸に対する前記投光光軸の方向角を検出する方向検出手段24とを有する。
(もっと読む)
多波長干渉計、計測装置および計測方法
【課題】 被検面が傾いていても測定精度を悪化させることのない多波長干渉計を提供する。
【解決手段】 波長が互いに異なる少なくとも2つの光束を参照光と被検光とに分割し、分割された参照光の周波数と被検光の周波数とを異ならせ、被検光と参照光とを干渉させる干渉計において、干渉光を複数の光束に分割する分割部を有し、分割された複数の光束を各波長について検出する。
(もっと読む)
管の内面曲がり測定装置およびそれを用いた測定方法
【課題】管の内面曲がりを定量的に測定できるとともに、様々な内径の鋼管に対応できる管の内面曲がり測定装置およびそれを用いた測定方法を提供する。
【解決手段】被測定材である管の長手方向に移動可能なヘッド21と、ヘッド21によって管10の周方向に揺動可能に支持され、管10の内面までの距離を測定する第1距離計22と、管10の長手方向におけるヘッド21の位置を測定する第2距離計(図示なし)と、ヘッド21の移動および第1距離計22の揺動を制御する制御手段とを備えることを特徴とする管の内面曲がり測定装置20である。本発明では、内面曲がり測定装置20が管10の長手方向に垂直な面におけるヘッド21の変位を測定する変位計を備え、ヘッド21を、管10を長手方向を水平にした状態で該管の内面上を走行する走行機構、および、第1距離計22の揺動軸を水平に維持する維持機構を有する走行装置に設けるのが好ましい。
(もっと読む)
光学式センサ
【課題】ノイズ光の入射により検出対象物が検出対象位置にあると判断され得る受光状態になった場合でも、誤検出が生じるのを防止する。
【解決手段】検出用の光を投光する投光部101と、投光された光に対する反射光を受光する受光部102と、検出部として機能するCPU10とを具備するセンサ1のCPU1に、受光部102の受光状態に基づき、検出対象物とセンサ1との間の距離があらかじめ定めた基準距離に適合するか否かを判別する第1の判別手段と、受光量を表すパラメータまたは受光量の増減に応じて調整される感度パラメータの変化の度合いがあらかじめ定めた許容範囲に入るか否かを判別する第2の判別手段との機能を付与する。各判別手段により物体との距離が基準距離に適合し、パラメータの変化の度合いが許容範囲に入ると判別されたとき、センサ1からは物体を検出したことを示す検出信号が出力される。
(もっと読む)
移動環境認識装置及び方法
【課題】高精度に測定対象の形状認識情報を得る。
【解決手段】測定対象までの距離画像データを得る距離画像測定工程ステップST1と、この距離画像測定工程で得た距離画像データに基づき、所定のデータの集合体からなるラベリング領域を作成するラベリング処理工程ステップST2〜ステップST7と、このラベリング処理工程で作成した複数のラベリング領域に基づいて複数の上面データを形成する上面データ形成工程ステップST8と、この上面データ形成工程で形成した複数の上面データに基づいて測定対象の形状を認識する形状認識工程ステップST9〜ステップST13と、を備えた移動環境認識方法である。
(もっと読む)
計測装置及び計測方法
【課題】参照面と被検面との間の距離の計測において、計測範囲の広範囲化の技術を提供する。
【解決手段】光源からの第1光を参照面に入射させ第2光を被検面に入射させる分割素子と、前記参照面で反射された前記第1光と前記被検面で反射された前記第2光との干渉光の位相をシフトさせる位相シフト部と、前記干渉光の強度を検出する検出部と、前記光源からの光の周波数を連続的に3つ以上の周波数に設定し前記3つ以上の周波数のそれぞれについて前記干渉光の位相をシフトさせながら前記干渉光の強度を検出するように前記検出部を制御し検出される前記干渉光の強度及び前記位相シフト部による前記干渉光の位相のシフト量に基づいて、前記参照面と前記被検面との間の光路長に相当する位相を特定し前記参照面と前記被検面との距離を求める処理部と前記処理部は前記3つ以上の周波数のそれぞれの間の周波数差が互いに異なるように前記3つ以上の周波数を設定する。
(もっと読む)
乾式ガスホルダーのピストンの監視方法および監視装置
【課題】乾式ガスホルダーに関し、ピストンの傾斜のみならず偏心も監視するための方法および装置を提供する。
【解決手段】筒状のホルダー本体2と、ホルダー本体内に配置された落し蓋状のピストン3と、ピストンとホルダー本体との隙間のシール機構4を具える乾式ガスホルダー1の、ピストンの監視方法において、ピストンの中心位置に偏心量測定テーブル5を設け、ホルダー本体の上端部に、偏心量測定テーブルおよびその近傍並びにその中心位置を含みまたは含まずに互いに多角形を形成する他の複数位置までの高さ方向距離を非接触でそれぞれ計測する距離計6を設け、中心位置の偏心量測定テーブルまでの高さ方向距離に急激な変化が生じた場合にピストンに偏心が生じたと判断し、その高さ方向距離の変化がないか穏やかな場合は、距離計で計測した多角形を形成する複数位置までの高さ方向距離に基づきピストンに傾斜が生じたか否かを判断する。
(もっと読む)
コークス炉の炉壁診断方法およびコークス炉の炉壁補修方法
【課題】老朽化したコークス炉における炭化室の炉壁の変形状態(壁面の凹凸、窯幅の変化)を、炭化室内部に測定装置を入れることなく、炭化室外部から簡便に精度良く測定することができるコークス炉の炉壁診断方法およびコークス炉の炉壁補修方法を提供する。
【解決手段】炭化室10の外側にレーザー式3次元形状測定装置20を配置し、レーザー式3次元形状測定装置20によって、蓋12をとった状態の窯口11から斜めにレーザー21を照射して、炉壁(壁面)13の形状を点群として測定する工程を、炭化室10の左右の壁面13a、13bに対して独立して実施した後、左右を独立して測定した壁面の形状を、炭化室10周辺の基準物22を元に合成して、一つの形状データ(点群)にまとめて左右合成炉壁形状とし、その左右合成炉壁形状から左右の壁面間の距離(窯幅)を計算して、炉壁形状(壁面の凹凸、窯幅の変化)の診断を行う。
(もっと読む)
バリ取り方法
【課題】より適切なバリ取りを行うことができるバリ取り方法を提供する。
【解決手段】バリ取り方法は、ワーク上のバリの形状を計測する計測工程(S1、S2)と、計測工程で得られた計測値に基づき、バリの長さ方向に沿って所定の根元算出点における両側の根元位置を算出する根元算出工程(S3〜S11)と、根元算出工程で得られた根元位置に基づいてバリ取り工具の軌道を算出する軌道算出工程と、軌道算出工程で得られた軌道に従ってバリ取り工具を移動させながらバリ取り加工を行うバリ取り工程とを備える。
(もっと読む)
タイヤ厚み測定装置
【課題】内圧を負荷した状態でタイヤの厚みを計測可能なタイヤ厚み測定装置を提供する。
【解決手段】上側ハーフリム84でタイヤ30の一方のビード部を支持し、下側ハーフリム26で他方のビード部を支持し、タイヤ内を密閉して内圧をかける。内側レーザー変位計66から外側レーザー変位計122までの距離からタイヤ内空部に配置した内側レーザー変位計66で計測したタイヤ内面までの距離とタイヤ外側に配置した外側レーザー変位計122で計測したタイヤ外面までの距離とを引き算する。これにより、内圧を負荷した状態でタイヤの厚みを計測することが出来る。
(もっと読む)
監視装置、プログラム
【課題】ベッドを基準にして監視すべき領域を自動的に検出することにより、監視対象の人の動作を正確かつ再現性よく検出することを可能にした監視装置を提供する。
【解決手段】距離画像センサ10は、画素値が物体までの距離値である距離画像を生成する。距離画像センサ10の視野領域には、監視対象であるベッドの全体を含む。ベッド認識部21は、距離画像センサ10が出力した距離画像を用いてベッドの位置を抽出する。人認識部22は、距離画像センサ10が出力した距離画像のうちベッド認識部21により認識したベッドの範囲内と範囲外とにおいて人が占有する領域を検出する。行動判定部23は、ベッド認識部21により検出したベッドと人認識部22により検出した人の領域との組み合わせによりベッドに対する人の動作を判別する。
(もっと読む)
3次元形状データ処理方法、3次元形状データ処理装置
【課題】3次元形状に対応するデータファイルのサイズを小さく、転送や取り扱いを容易とする。
【解決手段】レーザ光200の走査によって構成される面(走査面)と3次元形状をもつ対象物300との交線上に、各測定点は離散的に存在する。この3次元形状データ処理方法においては、データとして、3次元空間座標の点群データの代わりに、各走査面上における各測定点の平均位置Gnの空間的位置、走査面における座標軸Un、Vn軸の方向、各測定点Pn,i(1≦i≦k)についての、走査面での2次元座標(un,i、vn,i)を記録する。ただし、この2次元座標を記録する代わりに、後述する符号化された値を記録することもできる。
(もっと読む)
平面度測定方法
【課題】測定対象物の表面の平面度を精度良く求めることができる平面度測定方法を提供する。
【解決手段】平面度測定方法は、レーザ変位計を含むレーザ測定装置が、レーザ光を走査しながら、複数の位置における前記測定対象物の表面と測定基準面とする液面との間の、前記レーザ光の照射方向における距離の情報を測定して取り込む。この後、前記レーザ変位計が測定した複数の位置における前記距離の情報と、前記レーザ変位計が走査した前記複数の位置の位置情報をコンピュータが取り込む。前記コンピュータは、測定した前記位置それぞれにおける前記位置情報と前記距離の情報を座標として表した測定データを、座標空間上の点で表したとき、前記点すべてが2つの平行平面の間に挟まれ、かつ前記2つの平行平面の間の距離が最小となる目標平行平面を、前記2つの平行平面の傾きを変えながら探索することにより、前記平面度を算出する。
(もっと読む)
刻印装置
【課題】刻印試験を短時間で行うこと。
【解決手段】刻印装置1は、鋼片製品を固定する製品固定部2と、刻印試験を行うための鋼片製品と同種の鋼片試料を固定する試料固定部3と、製品固定部2および試料固定部3にそれぞれ固定された鋼片製品および鋼片試料に刻印ピン4bを押圧することによって鋼片製品および鋼片試料の表面に刻印を付与する刻印付与部4と、を備える。このような構成によれば、刻印試験を行う際、製造ラインに製品が搬送されてくるまで待機する必要がなくなるので、刻印試験を短時間で行うことができる。
(もっと読む)
描画装置およびその焦点調整方法
【課題】基板表面に対して光ビームを照射して描画する描画装置およびその焦点調整方法において、収束光学系の経時変化に対応することができ、しかも描画時の基板表面に収束光学系の焦点位置を適正に調整することのできる技術を提供する。
【解決手段】観察光学系80のダミー基板801と観察用カメラ803とを一体的に昇降可能とする。ダミー基板801の上面801aをステージ10上の基板Wの表面Sと略同一の高さに設定し、観察用カメラ803により観察されるダミー基板上面801aでの描画光学像が最も小さくなるように、光学ヘッド40aのフォーカシングレンズ431の位置を調整する。このときの光学ヘッド431とダミー基板上面801aとの距離を基準距離として、オートフォーカス部441,442によるオートフォーカス動作を実行する。
(もっと読む)
21 - 40 / 1,861
[ Back to top ]