
Fターム[2F065AA06]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 位置;移動量 (12,734) | 光軸方向;距離 (1,861)
Fターム[2F065AA06]に分類される特許
61 - 80 / 1,861
測定装置
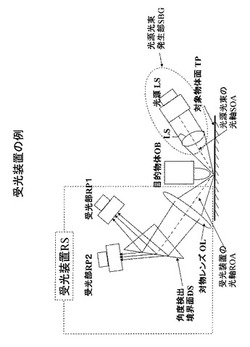
【課題】加工面と加工工具のように、対象物体面に目的物体の先端を精度良く位置決めする位置検出装置を提供する。
【解決手段】対象物体面上の所望の位置に光源光束を合焦させて、その合焦点に目的物体先端を近づけたときに生じる反射光の強度変化と反射光束の光線方向分布の変化を検出し、目的物体を対象物体面に関して高い分解能で接近させ位置決めする。
(もっと読む)
カメラ状態測定装置およびカメラ状態測定方法

【課題】ステレオカメラの設置状態を、簡単にかつ精度良く測定することができるカメラ状態測定装置を提供すること。
【解決手段】カメラ状態測定装置100は、ステレオカメラの設置状態に関し、ステレオカメラの撮影画像から、特徴点を抽出する特徴点検出部130と、特徴点検出部130で検出された特徴点のうち、基準面上に位置する2点の指定をユーザから受け付ける計測点指定部150と、上記2点についての対カメラ距離d1、d2を取得する対カメラ距離測定部180と、上記2点にいての対カメラ角θ1、θ2を取得する対カメラ角測定部190と、上記d1、d2、θ1、θ2に基づいて、ピッチ角θ0を算出するピッチ角計算部200と、上記d1、d2、θ1、θ2、θ0に基づいて、カメラ高さhを算出するカメラ高さ計算部210とを有する。
(もっと読む)
距離測定装置及び軌道周辺支障物検出装置
【課題】太陽光などの投光波長以外の光を極限まで制限して、投光波長のみを受光できるようにする。
【解決手段】干渉膜を使った平面板の干渉フィルタを用いて広い視野の検出手段を構成すると、平面板の干渉フィルタへの入射角に応じて透過帯域の移動が起こり、所望の信号強度を得ることが困難となる。この発明は、干渉フィルタの形状を球面状にして全視野の受光光線を干渉フィルタの入射面に対して垂直に入射するようにして、透過帯の移動をなくし、所望の信号強度を得るようにした。また、受光レンズの第一主点と球面状干渉フィルタの球面中心とを一致させて配置することにより、干渉フィルタへ入射する反射光の入射角を0°にして透過帯域が変化しないようにした。
(もっと読む)
リソグラフィ装置用のレベルセンサアレンジメント、リソグラフィ装置及びデバイス製造方法
【課題】改良されたレベルセンサアレンジメント及びその動作を提供する。
【解決手段】リソグラフィ装置内の基板上の少なくとも1つの実質的な反射層表面の位置を測定するための方法、並びに、関連付けられたレベルセンサ及びリソグラフィ装置が開示される。該方法は、広帯域光源を使用して少なくとも2つの干渉計測定を実行することを含む。各測定間で、広帯域ソースビームの成分波長及び/又は成分波長全体にわたる強度レベルが変化し、強度レベルのみが変化する場合、強度変化はビームの成分波長の少なくとも一部について異なる。あるいは、成分波長及び/又は成分波長全体にわたる強度レベルが異なる測定データを取得するための単一の測定及び後続の測定の処理を、位置を取得するためにも同様に適用することができる。
(もっと読む)
膜厚測定装置及び膜厚測定方法
【課題】被測定対象に施される遮熱コーティングの膜厚を効率良く正確に測定することが可能な膜厚測定装置及び膜厚測定方法を提供することを目的とする。
【解決手段】膜厚測定装置1は、タービン翼11に形成された遮熱コーティング膜の膜厚を測定するECTセンサ4と、遮熱コーティング膜の膜厚を測定する地点であるタービン翼11上の測定地点を記憶している記憶手段9と、タービン翼11の形状を測定するレーザ変位計5と、レーザ変位計5によって測定された測定されたタービン翼11の形状と、記憶手段9に記憶されているタービン翼11上の測定地点に基づいて、ECTセンサ4による実際の膜厚測定に適した実測定地点を算出する測定位置算出手段8と、測定位置算出手段8によって算出された実測定地点に基づいて、ECTセンサ4を駆動して、ECTセンサ4の測定位置を調整するアーム駆動手段6とを備える。
(もっと読む)
立体感提示装置および方法ならびにぼけ画像生成処理装置,方法およびプログラム
【課題】片眼でも立体感を得ることができる立体感提示装置を提供する。
【解決手段】間隔をおいて配置された2台のカメラから出力されるステレオ画像データを構成する左右の画像データに基づいて距離画像データを生成する距離画像生成手段53と,生成された距離画像データを用いて,上記の左または右の画像データに,距離に応じた焦点ぼけを与えてぼけ画像データを生成するぼけ画像生成手段55を備える。生成されたぼけ画像データに基づいて対象の焦点ぼけ画像を表示装置に表示する。
(もっと読む)
対象物体の検出方法、検出装置及びプログラム
【課題】対象物体を3次元の点群として計測した場合の形状データに基づいて、高速化を図りつつ精度よく対象物体を検出することの可能な検出方法を提供する。
【解決手段】3次元計測手段から3次元の計測点群として球体の形状データを取得する形状データ取得ステップ(S1)と、仮想座標空間において球体が占める対象体領域を各計測点の付加情報に従って区画する領域分割ステップ(S41)と、分割された各対象体領域の中から球体と推定される推定領域を抽出する対象体領域抽出ステップ(S43)と、推定領域毎に推定球体を生成し、対象体と認識される推定対象体を認識対象体とする対象体認識ステップ(S44)とを備える。
(もっと読む)
画像処理方法、ステレオカメラシステム
【課題】より短い処理時間で距離情報が得られる画像処理方法を提供すること。
【解決手段】第1の画像と第2の画像を撮影するステップと、加算手段241が、第1の画像の第1の合計値、及び、第2の画像の第2の合計値を算出する合計値算出ステップと、シフト手段242が記第1の合計値を所定ビット数、右にシフトして第1の近似平均値を算出し、同様に第2の近似平均値を算出する近似平均値算出ステップと、整数倍手段243,244が、第1の画像と第2の画像の小領域内の各画素データの値を整数倍する整数倍ステップと、相関値算出手段249が、該画素データの値を整数倍した値から第1の近似平均値を引いた第1のデータと、画素データを整数倍した値から第2の近似平均値を引いた第2のデータをそれぞれ求め、画素データ毎に前記第1のデータと第2のデータとの差分の二乗和を算出する相関値算出ステップと、を有する画像処理方法を提供する。
(もっと読む)
変位測定装置及び光無線通信システム
【課題】光無線通信システムのトラッキング機構の小型化、測定精度向上等を実現する。
【解決手段】送信ユニット11に2つの距離センサ14,15を設け、受信ユニット21に位置指標部23と基準高さ部24を設ける。位置指標部23は、複数のエリアに区画され且つ各エリア毎に高さが異なる三次元形状に形成され、基準高さ部24を基準とした各エリアの高さとエリア位置との関係を変位測定テーブルデータとして記憶する。各距離センサ14,15によって位置指標部23の1つのエリアまでの距離と基準高さ部24までの距離をそれぞれ測定し、これら2つの距離測定値の差分と変位測定テーブルデータとに基づいて位置指標部23のうちの第1の距離センサ14で測定したエリア位置を特定することで、受信ユニット21の変位量及び変位方向を判定し、その判定結果に基づいて送信部12と受信部22との光軸ずれを補正するように光軸ずれ補正機能を作動させる。
(もっと読む)
計測装置、計測方法、及びプログラム
【課題】平坦でない路面上に存在する対象物の高さを正確に計算することができる計測装置、計測方法、及びプログラムを提供する。
【解決手段】センサ情報取得部21は、基準位置から路面上の複数の点へ向けてレーザを射出し、当該レーザの反射光に基づいて、基準位置から当該レーザが反射された点である反射点までの距離を計測するレーザセンサから計測結果を取得する。路面高特定部23は、記憶部22が記憶する路面高情報に基づいて反射点それぞれにおける路面高を特定する。高さ算出部29は、レーザセンサが算出したそれぞれの距離と路面高特定部23が特定した路面高とに基づいて、路面から前記反射点までの長さを対象物の高さとして算出する。
(もっと読む)
車両の操舵角計測装置
【課題】操舵角計測装置を改善することにより、ステアリングホイールの操舵角を作業効率を向上しつつ精度よく計測し得る操舵角計測装置に関する。
【解決手段】ステアリングホイール3とともに回転する反射面5を有する反射部材4と、前記反射面5との距離に基づいた信号を出力する第1の変位計7a及び第2の変位計7bからなるレーザ変位計7とを含む車両のステアリングホイール3の操舵角計測装置1である。前記反射面5は、前記第1の変位計7aとの距離を一定とする等距離面と、第1継ぎ面とが交互にかつ階段状に接続される階段状面Kからなる第1の反射面と、前記第2の変位計7bとの距離が漸減する傾斜面と、第2継ぎ面とが交互に接続される鋸歯状面からなる第2の反射面とからなる。しかも、前記傾斜面と、前記等距離面とは、位相が揃えられている。
(もっと読む)
情報処理装置及び情報処理方法
【課題】撮像装置と計測対象物体との関係が高速に変化している場合であっても、物体の位置及び姿勢の計測を精度良く行えるようにする。
【解決手段】2次元画像及び距離画像が撮像可能な撮像装置20、30により、被測定物体の3次元的な位置姿勢を推定する情報処理装置1であって、被測定物体の位置姿勢推定用照合データを保存する位置姿勢推定用照合データ保存手段110と、撮像装置が第1の位置姿勢において撮影した2次元画像を入力する2次元画像入力手段120と、撮像装置が第2の位置姿勢において撮像した距離画像を入力する距離画像入力手段130と、第1の位置姿勢と第2の位置姿勢の相対位置姿勢情報である位置姿勢差分情報を取得する相対位置姿勢情報入力手段と、位置姿勢差分情報に基づき、2次元画像及び距離画像に対して、位置姿勢推定用照合データが当てはまるように被測定物体の位置姿勢を算出する位置姿勢推定手段160とを設ける。
(もっと読む)
ヘテロダインレーザー干渉測長器
【課題】測長結果から精度よくデッドパスの影響を排除するヘテロダインレーザー干渉測長器を提供する。
【解決手段】ヘテロダインレーザー光源10からのビームを分岐させて測定ビームB1と参照ビームB2を生成する分岐器80と、測定ビームB1及び参照ビームB2を分割する偏光ビームスプリッタ30と、測定光路LP1,LP2に設けられる1/4波長板31,32と、可動測定物50に固定され、測定ビームB11,B12が照射される測定ミラー341,342と、測定ミラー341,342近傍に配置され、参照ビームB21,B22が照射される反射ミラー411,412と、測定ミラー341,342の反射光を干渉させた光と反射ミラー411,412の反射光を干渉させた光に基づく2つのビート信号から変位を算出する演算回路70を備え、分機器80は測定ビームB1と参照ビームB2の光量比を連続的に変化させて調整する調整手段を有する。
(もっと読む)
移動体駆動方法及び移動体駆動システム、パターン形成方法及び装置、露光方法及び装置、デバイス製造方法、計測方法、並びに位置計測システム
【課題】面位置センサの設置位置を計測し、該計測された設置位置に基づいて面位置センサを用いて移動体の2次元移動面の垂直方向と傾斜方向の位置座標を計測することにより、移動体を安定かつ高精度に駆動する。
【解決手段】 干渉計システムを用いてウエハステージWSTのXY位置を監視しながらウエハステージを移動させて、面位置センサ72k,74i,76jを用いてYスケール39Y3,39Y4を、X軸方向及びY軸方向に走査することにより、面位置センサのXY設置位置を計測する。得られた設置位置情報に基づいて、面位置センサを用いて、ウエハステージのXY平面(移動面)に対する垂直方向と傾斜方向の位置座標を計測することにより、ウエハステージを安定かつ高精度に駆動する。
(もっと読む)
3次元シーンの要素の奥行きを評価する装置
【課題】3次元シーンに分布した被写体要素(object element)の奥行きを評価するための有利な装置を提案すること。
【解決手段】装置は、光学系であって、それ自体が、複数の画素21、22、23を有する光センサ2、および光センサの画素の1つの上にシーンの要素E1、E2、E3を結像できるレンズ1を備える光学系と、この要素からきてビットマップ方式の光センサの画素のうちの1つによって取り込まれた光のストリームの最大値に着目することによって焦点を調整できるシーンの要素のいずれか1つに光学系の焦点を調整する手段と、この焦点の調節からこの要素の奥行きを推定するのに適した手段とを備える。
(もっと読む)
位置計測装置、それを用いた被加工物の製造方法及び成形品
【課題】高精度に移動体の位置を計測可能な位置計測装置を提供する。
【解決手段】位置計測装置1は、周期的に高さが増減する目盛パターンが形成された目盛部30の高さ変位を、変位センサ10によって計測する。そして、この変位センサ10によって計測された高さの周期的な変位を、演算部20によって位置情報に演算して、移動体の位置を計測する。目盛部30の目盛パターンは、平面の組み合わせによって形成されるため、変位センサ10の出力電圧は平面の傾きに応じた直線を組み合わせた波形となる。
(もっと読む)
撮像装置及びこれを備えた物体検出装置並びに偏光フィルタ
【課題】湾曲面からの反射光を適切にカットし又は湾曲面からの反射光を適切に選択して透過させることを課題とする。
【解決手段】湾曲したフロントガラス面に対する相対位置が一定となるように設置され、そのフロントガラス面からの反射光(水平偏光成分S)をカットする鉛直偏光領域を備えた偏光フィルタ層を介して、撮像領域からの光を画像センサ206上の各撮像画素で受光して撮像する撮像装置において、上記鉛直偏光領域は、透過軸方向が異なる複数のフィルタ領域部分から構成されており、各フィルタ領域部分の透過軸方向は、当該フィルタ領域部分へ入射してくるフロントガラス面上からの反射光の最大偏光成分の偏光方向に基づいて設定される。
(もっと読む)
多方向近接センサー
【課題】多方向の動き検出機能を有する近接センサーを提供する。
【解決手段】近接センサーは、ASIC(特定用途向け集積回路)チップ104、特定のシーケンスで光を放射するように構成された少なくとも3つの光源102、及び、光を受光して出力信号を生成するように構成された光検出器106を備える。多方向近接センサーは、少なくとも1つの側面を有する第1の近接センサーと100、第1の近接センサーの該少なくとも1つの側面にほぼ平行な面の上における物体の動きを検出するように構成された第2の近接センサーを備え、この場合、該第2の近接センサーは第1の近接センサー100に接続される。多方向動き検出近接センサーはPCBを有し、その場合、2以上の近接センサーを、PCBに配置して、多方向における動きを検出できるように一体化する。
(もっと読む)
画像センサのチルトを求めるための方法
【課題】カメラに取り付けられた画像センサのチルトを求めるための、改善された方法を提供する。
【解決手段】カメラ12における画像センサ10表面の、カメラ12のレンズ基準面26に対するチルトを求めるための方法であり、画像センサ10に光を送るステップと、画像センサ10から反射した光を受けるステップと、反射光における干渉パターンを特定するステップと、干渉パターンの特徴を特定するステップと、干渉パターンにおいて特定された特徴の位置に基づいて画像センサ10表面のチルトを求めるステップとを含む。
(もっと読む)
車軸検出装置
【課題】車軸検出装置における車軸の検出精度を向上させる。
【解決手段】車両進行方向に対して垂直方向に被写体に対して赤外線を照射する赤外線照射部(101a〜101d)と、前記被写体からの反射光をそれぞれ受光して被写体像を取得する画像取得部(104a、104b)と、取得された複数の被写体像に基づいて、前記被写体までの距離を演算する距離演算部(107)と、被写体に車両が含まれない場合の該被写体までの距離を記憶する距離データ記憶部(109)と、演算された前記被写体までの距離と記憶された距離との比較結果に基づいて車軸を検出する車軸判別部(110)と、を具備し、距離データ記憶部(109)は、前記被写体に車両が含まれない場合で演算された前記被写体までの距離の信頼性が所定条件を満足する場合、前記演算された距離に記憶内容を更新する。
(もっと読む)
61 - 80 / 1,861
[ Back to top ]